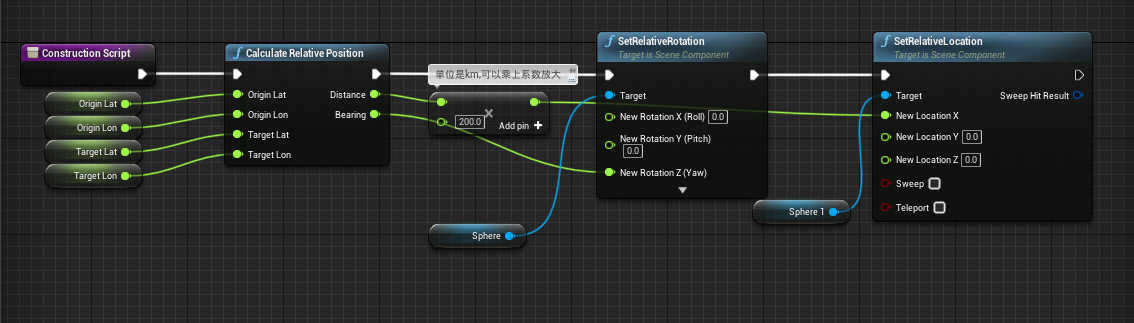
2个经纬度,通过计算得出其中一个相对另一个的距离和角度
void URelativePositionMapBPLibrary::CalculateDistanceAndBearing(float OriginLat, float OriginLon, float TargetLat, float TargetLon,float& Distance,float& Bearing)
{
//float Distance, Bearing;
HaversineFormula(OriginLat, OriginLon, TargetLat, TargetLon, Distance, Bearing);
}
float URelativePositionMapBPLibrary::HaversineFormula(float Lat1, float Lon1, float Lat2, float Lon2, float& OutDistance, float& OutBearing)
{
// 将经纬度转换为弧度
Lat1 = DegreesToRadians(Lat1);
Lon1 = DegreesToRadians(Lon1);
Lat2 = DegreesToRadians(Lat2);
Lon2 = DegreesToRadians(Lon2);
// 计算差异
float DeltaLat = Lat2 - Lat1;
float DeltaLon = Lon2 - Lon1;
// 应用哈弗赛因公式
float A = FMath::Square(FMath::Sin(DeltaLat / 2.0f)) +
FMath::Cos(Lat1) * FMath::Cos(Lat2) * FMath::Square(FMath::Sin(DeltaLon / 2.0f));
float C = 2.0f * FMath::Atan2(FMath::Sqrt(A), FMath::Sqrt(1.0f - A));
// 地球的半径(单位:千米)
const float EarthRadius = 6371.0f;
// 计算球面距离
OutDistance = EarthRadius * C;
// 计算方向角
float Y = FMath::Sin(DeltaLon) * FMath::Cos(Lat2);
float X = FMath::Cos(Lat1) * FMath::Sin(Lat2) -
FMath::Sin(Lat1) * FMath::Cos(Lat2) * FMath::Cos(DeltaLon);
OutBearing = RadiansToDegrees(FMath::Atan2(Y, X));
}
float URelativePositionMapBPLibrary::DegreesToRadians(float Degrees)
{
return Degrees * (PI / 180.0f);
}
float URelativePositionMapBPLibrary::RadiansToDegrees(float Radians)
{
return Radians * (180.0f / PI);
}
在UE中使用,可以通过计算来实现设置物体的位置,也可以通过子组件相对父组件的距离和角度来设置,后者简单一点