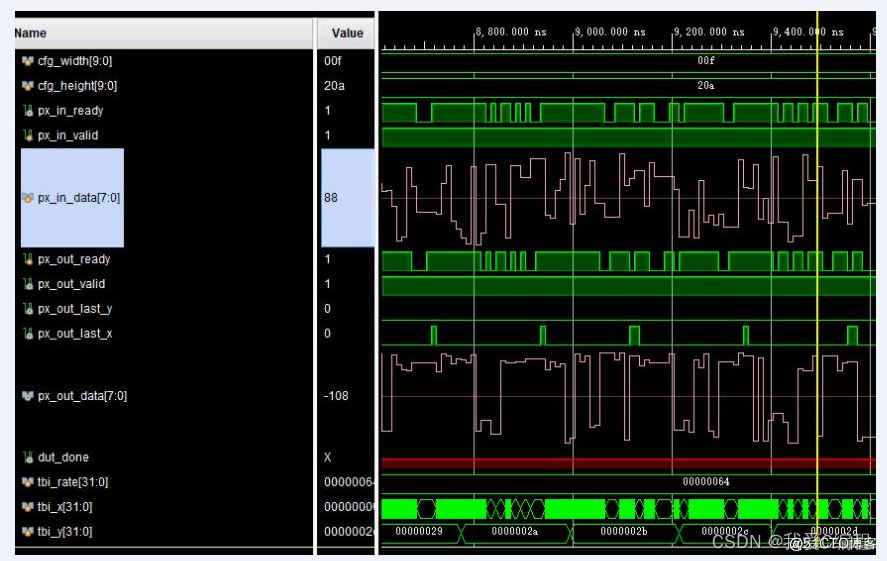
1.算法仿真效果
matlab2022a仿真结果如下:

2.算法涉及理论知识概要
FIR(Finite Impulse Response)滤波器:有限长单位冲激响应滤波器,又称为非递归型滤波器,是数字信号处理系统中最基本的元件,它可以在保证任意幅频特性的同时具有严格的线性相频特性,同时其单位抽样响应是有限长的,因而滤波器是稳定的系统。因此,FIR滤波器在通信、图像处理、模式识别等领域都有着广泛的应用。
在进入FIR滤波器前,首先要将信号通过A/D器件进行模数转换,把模拟信号转化为数字信号;为了使信号处理能够不发生失真,信号的采样速度必须满足香农采样定理,一般取信号频率上限的4-5倍做为采样频率;一般可用速度较高的逐次逼进式A/D转换器,不论采用乘累加方法还是分布式算法设计FIR滤波器,滤波器输出的数据都是一串序列,要使它能直观地反应出来,还需经过数模转换,因此由FPGA构成的FIR滤波器的输出须外接D/A模块。FPGA有着规整的内部逻辑阵列和丰富的连线资源,特别适合于数字信号处理任务,相对于串行运算为主导的通用DSP芯片来说,其并行性和可扩展性更好,利用FPGA乘累加的快速算法,可以设计出高速的FIR数字滤波器。
(1) 系统的单位冲激响应h (n)在有限个n值处不为零
(2) 系统函数H(z)在|z|>0处收敛,极点全部在z = 0处(因果系统)
(3) 结构上主要是非递归结构,没有输出到输入的反馈,但有些结构中(例如频率抽样结构)也包含有反馈的递归部分。
设FIR滤波器的单位冲激响应h (n)为一个N点序列,0 ≤ n ≤N —1,则滤波器的系统函数为
H(z)=∑h(n)*z^-k
就是说,它有(N—1)阶极点在z = 0处,有(N—1)个零点位于有限z平面的任何位置。
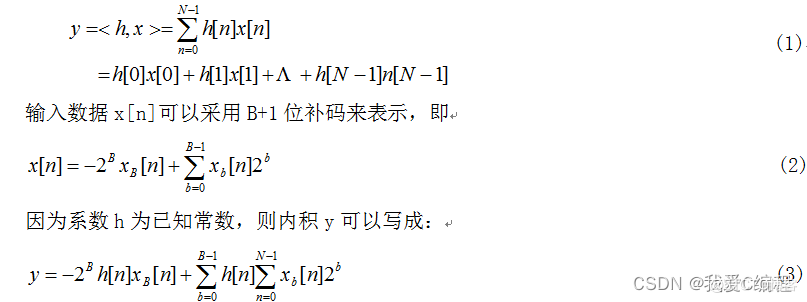
对于FIR(有限长单位冲激响应)滤波器,其基本结构是一个分节的延时线,每一节的输出加权累加,得到滤波器的输出。其输出y就是输入x和系数h的内积:
3.MATLAB核心程序
module xfilter(clk, rst,
i_valid_new_pixel,
i_new_pixel,
i_valid_lpos,
i_valid_cpos,
i_valid_rpos,
i_rowM,
o_valid_filt,
o_filt_pixel,
o_colN,
o_rowM
);
parameter XB = 10;
parameter PB = 8;
input clk;
input rst;
input i_valid_new_pixel;
input [(PB + 2) - 1:0] i_new_pixel;
input i_valid_lpos;
input i_valid_cpos;
input i_valid_rpos;
input i_rowM;
output o_valid_filt;
output [PB - 1:0] o_filt_pixel;
output o_colN;
output o_rowM;
reg [(PB + 4) - 1:0] r_pixel_sum = 0;
reg [PB - 1:0] rr_pixel_sum = 0;
reg r_valid_lpos = 0;
reg r_valid_cpos = 0;
reg r_valid_rpos = 0;
reg r_valid_filt_pixel = 0;
reg rr_valid_cpos = 0;
reg r_valid_pixel_in = 0;
reg rr_valid_pixel_in = 0;
........................................................................
always @(posedge clk)
begin
//read in pixel
r_valid_lpos <= i_valid_lpos;
r_valid_cpos <= i_valid_cpos;
r_valid_rpos <= i_valid_rpos;
rr_valid_cpos <= r_valid_cpos;
r_colN <= i_valid_rpos;
rr_colN <= r_colN;
rrr_colN <= rr_colN;
r_rowM <= i_rowM;
rr_rowM <= r_rowM;
rrr_rowM <= rr_rowM;
if (rst)
begin
r_valid_pixel_in <= 0;
rr_valid_pixel_in <= 0;
r_valid_filt_pixel <= 0;
end
else
begin
r_valid_pixel_in <= c_valid_pixel_in;
rr_valid_pixel_in <= r_valid_pixel_in;
r_valid_filt_pixel <= rr_valid_pixel_in;
end
r_pixel2 <= c_pixel2;
end
wire [PB + 4 - 1: 0] c_pixel_sum = (rr_valid_cpos) ? r_pixel_sum + r_pixel2 + 8: r_pixel_sum + 8;
reg r_valid_new_pixel = 0; //needed to check if new row's data was added
//add filter
always @(posedge clk)
begin
r_valid_new_pixel <= i_valid_new_pixel;
if (r_valid_rpos)
begin
if (r_valid_new_pixel) //new data added to queue
r_pixel_sum <= {c_pixel1, 1'd0} + c_pixel2;
else
r_pixel_sum <= {c_pixel0, 1'd0} + c_pixel1;
end
else
begin
r_pixel_sum <= c_pixel0 + {c_pixel1, 1'd0};
end
rr_pixel_sum <= c_pixel_sum[PB + 4 -1: 4];
end
//3 pixel buffer
queue PIXBUF (.clk(clk),
.i_valid_pixel(i_valid_new_pixel),
.i_pixel(i_new_pixel),
.o_pixel0(c_pixel0),
.o_pixel1(c_pixel1),
.o_pixel2(c_pixel2)
);
endmodule
module queue(clk, i_valid_pixel, i_pixel, o_pixel0, o_pixel1, o_pixel2);
parameter PB = 8;
.....................................................
endmodule