轮毂电机分布式驱动电动汽车操稳性控制,DYC联合AFS控制,直接横摆力矩控制,主动前轮转向控制
软件使用:Matlab/Simulink
适用场景:轮毂电机分布式驱动电动汽车直接横摆力矩DYC控制(各轮差速差扭),联合AFS主动前轮转向控制,可实现多种工况下整车行驶稳定性。
产品simulink源码包含如下模块(购买时选取一种搭配即可):
→整车模块:7自由度整车模型
→上层控制器:滑模控制
→下层分配器:平均分配,动态分配,最优分配
→DYC控制规律:横摆角速度跟随控制,+质心侧偏角联合控制(包括两个模块)
→AFS控制规律:横摆角速度跟随控制,+质心侧偏角联合控制(包括两个模块)
→联合控制模块
购买方式:客户可选择一种整车模块,一种上层控制器,一种下层分配器,多种控制规律。
不同选择价格有差异。
例如可选择7自由度整车模块+滑模控制+平均分配+DYC、AFS横摆角速度跟随控制方案+联合控制模块,该方案为基础款
购买包含:simulink源码文件,详细建模说明文档,对应参考资料,售后提供关于产品任何问题,代码均为自己开发,感谢您的支持。
适用于需要或想学习整车动力学simulink建模,以及simulink控制算法建模的朋友。
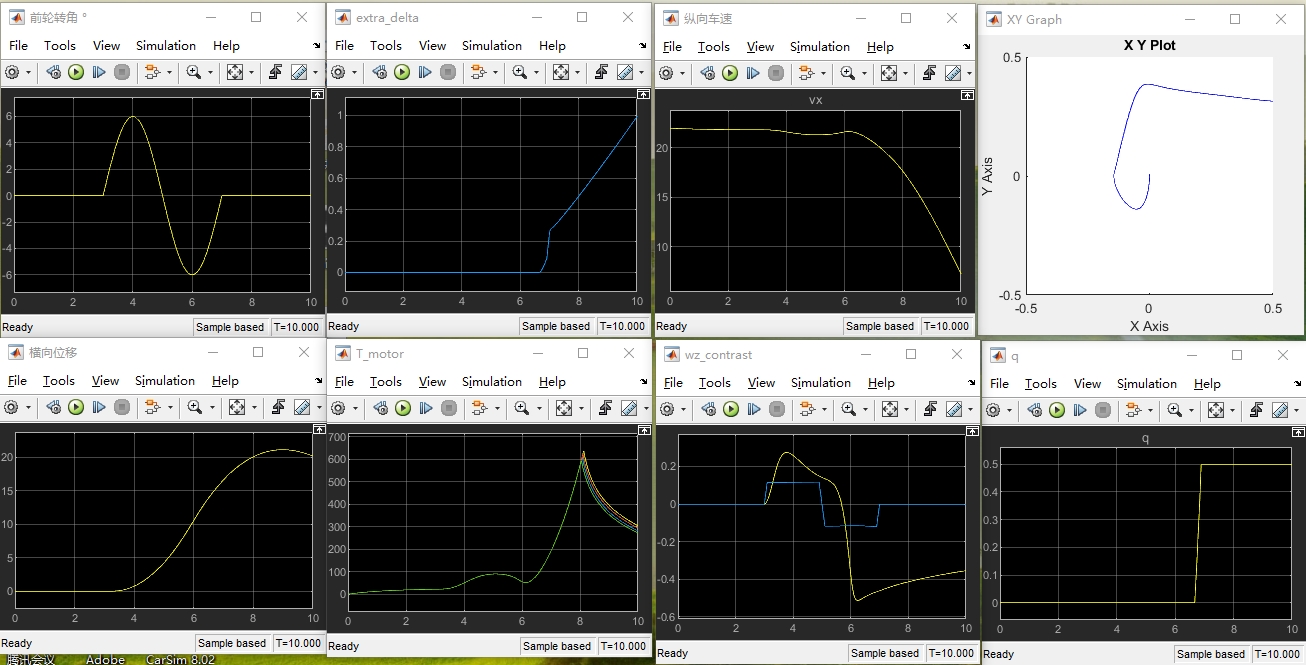
模型运行完全OK
ID:26526670070170424