1 基本资料
https://blog.csdn.net/heyijia0327/article/details/51773578
2推导公式
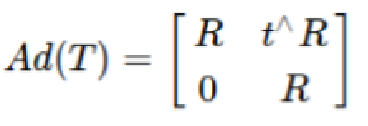
2-1 结论

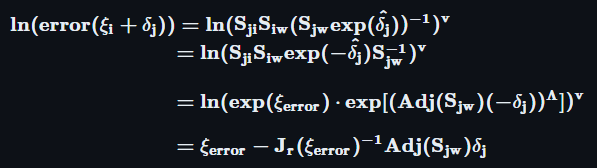
2-2 slam14讲解推导






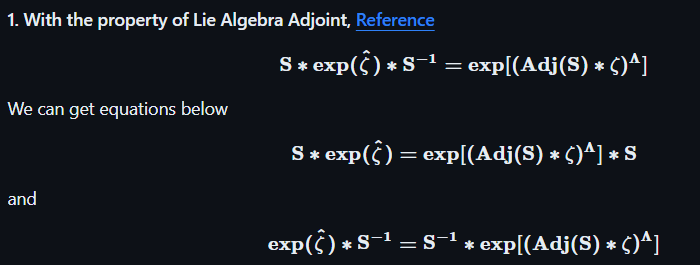
伴随性质利用


伴随性质利用

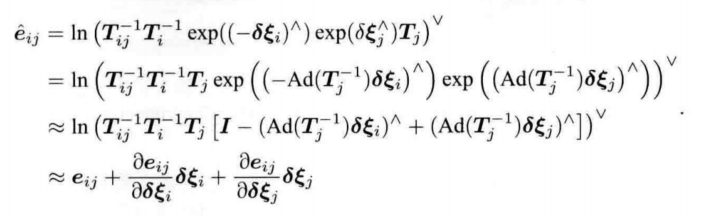
其中用到了近似







https://github.com/b51/CeresSim3Optimize
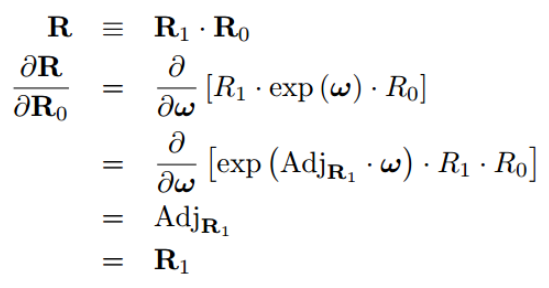
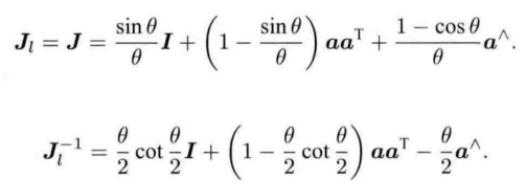
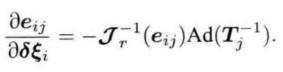
Jacobian Calculation of sim(3)

Derivation of Jacobiani


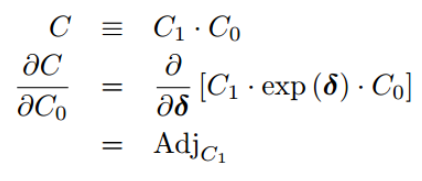
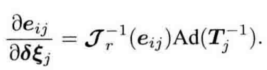
Same to Jacobianj

3代码
https://github.com/b51/CeresSim3Optimize
G2O代码

void EdgeSE3Expmap::computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
const VertexSE3Expmap* v2 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
SE3Quat C(_measurement);
SE3Quat error_ = v2->estimate().inverse() * C * v1->estimate();
_error = error_.log();
}
void EdgeSE3Expmap::linearizeOplus() {
VertexSE3Expmap* vi = static_cast<VertexSE3Expmap*>(_vertices[0]);
SE3Quat Ti(vi->estimate());
VertexSE3Expmap* vj = static_cast<VertexSE3Expmap*>(_vertices[1]);
SE3Quat Tj(vj->estimate());
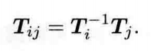
const SE3Quat& Tij = _measurement;
SE3Quat invTij = Tij.inverse();
SE3Quat invTj_Tij = Tj.inverse() * Tij;
SE3Quat infTi_invTij = Ti.inverse() * invTij;
_jacobianOplusXi = invTj_Tij.adj();
_jacobianOplusXj = -infTi_invTij.adj();
}