仿射坐标系
不共面向量
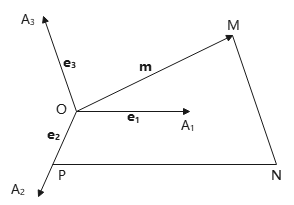
定理1 空间中任意给定三个不共面的向量\(\bm{e_1},\bm{e_2},\bm{e_3}\),则任意一个向量\(\bm{m}\)可以唯一表示成\(\bm{e_1},\bm{e_2},\bm{e_3}\)的线性组合.
证明:
可表性.
取一点O,作\(\overrightarrow{OA_1},\overrightarrow{OA_2},\overrightarrow{OA_3}\)分别表示\(\bm{e_1},\bm{e_2},\bm{e_3},\bm{m}\). 过M作直线\(MN//\overrightarrow{OA_3}\)交平面\(OA_1A_2\)于点N,过N作直线\(NP//OA_1\)交\(OA_2\)于P.
有,
∴存在实数x,y,z使得
而
唯一性. 如果存在另一组实数\(x_1,y_1,z_1\),使得
则有,
∵\(\bm{e_1},\bm{e_2},\bm{e_3}\)不共面
∴不存在非零实数\(\alpha,\beta,\gamma\)使得\(\alpha\bm{e_1}+\beta\bm{e_2}+\gamma\bm{e_3}=0\)成立
也就是说,\(\alpha=\beta=\gamma=0\)
∴\(x-x_1=y-y_1=z-z_1=0\)
∴\(x=x_1,y=y_1,z=z_1\)
基向量
定义1 空间中任意三个有次序的不共面的向量\(\bm{e_1},\bm{e_2},\bm{e_3}\)称为空间中的一组基. 对于空间中任一向量\(\bm{m}\),若
\[\bm{m}=x\bm{e_1}+y\bm{e_2}+z\bm{e_3} \]
则把有序三元实数组(x,y,z)称为\(\bm{m}\)在基\(\bm{e_1},\bm{e_2},\bm{e_3}\)中的坐标.
如3D笛卡尔坐标系下,基向量可以是\(\bm{e_1}=(1,0,0),\bm{e_2}=(0,1,0)\bm{e_3}=(0,0,1)\). 空间中向量\(\bm{m}=10\bm{e_1}+20\bm{e_2}+30\bm{e_3}\),可以用三元数组(10,20,30)来表示.
仿射标架(仿射坐标系)
定义2 空间中一个点O和一组基\(\bm{e_1},\bm{e_2},\bm{e_3}\)合在一起称为空间的一个仿射标架或仿射坐标系,记作\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\),其中O称为原点. 对于空间中任一点M,把它的定位向量\(\overrightarrow{OM}\)在基\(\bm{e_1},\bm{e_2},\bm{e_3}\)中的坐标称为点M在仿射标架\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\)中的坐标.
简单说,原点 + 基 = 仿射标架(或仿射坐标系)
由定义知,点M在仿射坐标系\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\)下坐标为(x,y,z)的充要条件:
\(\bm{m}\)在基\(\bm{e_1},\bm{e_2},\bm{e_3}\)中的坐标,也称为\(\bm{m}\)在仿射坐标系\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\)中的坐标.
- 坐标轴
设\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\)为一个仿射标架,过原点O且分别以\(\bm{e_1},\bm{e_2},\bm{e_3}\)为方向的有向直线分别称为x轴,y轴,z轴,它们统称坐标轴. 每2个坐标轴决定的平面称为坐标平面,分别是xOy, yOz, zOx平面. 坐标平面将空间分为8部分,称为八个挂限(注:2D平面是象限),每个挂限内,点的坐标符号不变.
直角标架(直角坐标系)
定义3 如果单位向量\(\bm{e_1},\bm{e_2},\bm{e_3}\)两两垂直,则\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\)称为一个直角标架或直角坐标系.
注意:此时\(\bm{e_1},\bm{e_2},\bm{e_3}\)必不共面.
直角标架是一个特殊的仿射标架. 点或向量在直接坐标系中的坐标,称为直角坐标,在仿射坐标系中的坐标称为仿射坐标.
向量共线(共面)
注:由于仿射标架下很多结论证明依赖于这部分,因此将其加入本文.
向量的加法、数量乘法(向量乘以实数)统称线性运算.
设\(\bm{a_1,a_2,...,a_n}\)是一组向量,\(k_1,k_2,...,k_n\)是一组实数,则\(k_1\bm{a_1}+k_2\bm{a_2}+...+k_n\bm{a_n}\)是一个向量,称它为向量组\(\bm{a_1,a_2,...,a_n}\)的一个线性组合,称\(k_1,k_2,...,k_n\)是这个组合的系数.
定义4 向量组如果用同一起点的有向线段表示后,它们在一条直线(一个平面)上,则称这个向量组是共线(共面)的.
如果向量\(\bm{a}\)与\(\bm{b}\)共线,记作\(\bm{a}//\bm{b}\).
有以下结论:
1)\(\bm{0}\)向量与任意向量共线;
2)共线的向量组一定共面;
3)如果\(\bm{a}=\lambda\bm{b}\),则\(\bm{a,b}\)共线.
两向量共线
命题1 如果\(\bm{a,b}\)共线,且\(\bm{a}\neq 0\),则存在唯一实数使得\(\bm{b}=\lambda\bm{a}\).
证明:存在性.
如果\(\bm{a,b}\)同向,则对应单位向量\(\bm{b^0}=\bm{a^0}\),进而由:
可取\(\lambda=|\bm{b}||\bm{a}|^{-1}\),可得\(\bm{b}=\lambda\bm{a}\).
如果\(\bm{a,b}\)反向,则对应单位向量\(\bm{b^0}=-\bm{a^0}\),也可得到类似结论.
唯一性.
假设\(\bm{b}=\lambda \bm{a}=\mu \bm{a}\),则\((\lambda-\mu)\bm{a}=0\)
∵\(\bm{a}\neq 0\)
∴\(\lambda-\mu=0\)
∴\(\lambda=\mu\)
命题2 \(\bm{a,b}\)共线充要条件:存在不全为0的实数λ、μ,使得
\[\lambda \bm{a}+\mu \bm{b}=0 \]
证明:必要性.
设\(\bm{a,b}\)共线
如果\(\bm{a}=\bm{b}=0\),可取\(\lambda=1,\mu=1\),则\(1\bm{a}+1\bm{b}=0\).
如果\(\bm{a,b}\)不全为0,不妨设\(\bm{a}\neq 0\),则存在实数λ使得\(\bm{b}=\lambda\bm{a}\). 有
充分性.
如果有不全为0的实数λ、μ使得\(\lambda \bm{a}+\mu \bm{b}=0\)成立.
不妨设\(\bm{a}\neq 0\),则\(\bm{a}=-\frac{\mu}{\lambda}\bm{b}\)
∴\(\bm{a,b}\)共线
推论1 \(\bm{a,b}\)不共线的充要条件:要使得式\(\lambda\bm{a}+\mu\bm{b}=0\)成立,则\(\lambda=\mu=0\).
证明:
必要性. 设\(\bm{a,b}\)不共线.
反证法:如果存在λ、μ不全为0,使得\(\lambda\bm{a}+\mu\bm{b}=0\)成立,那么上面定理,知\(\bm{a,b}\)共线. 这与假设茅盾,因此\(\lambda=\mu=0\).
充分性. 设\(\lambda\bm{a}+\mu\bm{b}=0\)成立时,必有\(\lambda=\mu=0\).
反证法:假设\(\bm{a,b}\)共线
当\(\bm{a}\)是0向量时,μ必为0,但λ可以是任意值,不符合必有\(\lambda=\mu=0\)的结论;
同理,当\(\bm{b}\)是0向量时,也不符合结论.
当\(\bm{a},\bm{b}\)都不是0向量时,那么存在实数γ,使得\(a=γb\),即\(1\bm{a}+(-γ)\bm{b}=0\),可取\(\lambda=1,\mu=-γ\)不符合结论.
因此,假设不成立,也就是\(\bm{a,b}\)不共线成立.
三向量共面
命题3 如果\(\bm{c}=\lambda\bm{a}+\mu\bm{b}\),则\(\bm{a,b,c}\)共面.
证明:
如果\(\bm{a}\parallel\bm{b}\),则\(\bm{a,b,c}\)共线,从而共面.
如果\(\bm{a}\nparallel\bm{b}\),
当\(\lambda或\mu\)为0时,则\(\bm{c}\)必与\(\bm{b}或\bm{a}\)共线
当\(\lambda>0,\mu>0\)时,\(\bm{c}\)是以\(\lambda\bm{a}, \mu\bm{b}\)为邻边的平行四边形对角线
∴\(\bm{a,b,c}\)共面
当\(\lambda>0,\mu<0\)时,\(\bm{c}\)是以\(\lambda\bm{a}, (-\mu)(-\bm{b})\)为邻边的平行四边形对角线
∴\(\bm{a,b,c}\)共面
其他符号情况,可类似讨论.
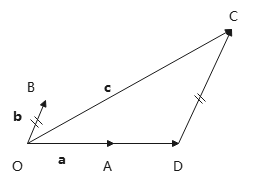
命题4 如果\(\bm{a,b,c}\)共面,且\(\bm{a,b}\)不共线,则存在唯一实数对λ、μ,使得\(\bm{c}=\lambda \bm{a}+\mu \bm{b}\).
证明:
存在性.
从同一起点O作
过点C作CD//OB交OA于D点.
∵\(\overrightarrow{OD}//\bm{a}\)
∴存在实数λ使得\(\overrightarrow{OD}=\lambda\bm{a}\)
同理,存在实数μ使得\(\overrightarrow{DC}=\mu\bm{b}\)
∴\(\bm{c}=\overrightarrow{OC}=\overrightarrow{OD}+\overrightarrow{DC}=\lambda \bm{a}+\mu \bm{b}\).
唯一性.
假设\(\bm{c}=\lambda\bm{a}+\mu\bm{b}=\lambda_1\bm{a}+\mu_1\bm{b}\),则
∵\(\bm{a,b}\)不共线
∴\(\lambda-\lambda_1=\mu-\mu_1=0\)
∴\(\lambda=\lambda_1,\mu=\mu_1\)
命题5 \(\bm{a,b,c}\)共面的充要条件:有不全为0的实数\(k_1,k_2,k_3\),使得\(k_1\bm{a}+k_2\bm{b}+k_3\bm{c}=0\).
证明:充分性.
不妨设\(k_3\neq 0\)
有
由命题3知,\(\bm{a,b,c}\)共面.
必要性.
如果\(\bm{a,b}\)共线,由命题2知,有不全为0的实数λ、μ,使得\(\lambda \bm{a}+\mu\bm{b}=0\),那么\(\lambda \bm{a}+\mu\bm{b}+0 \bm{c}=0\).
如果\(\bm{a,b}\)不共线,由命题4知,存在唯一实数对λ、μ,使得\(c=\lambda \bm{a}+\mu\bm{b}\),那么\(\lambda \bm{a}+\mu\bm{b}+(-1)\bm{c}=0\).(-1不等于0)
推论1 \(\bm{a,b,c}\)不共面的充要条件:从式\(k_1\bm{a}+k_2\bm{b}+k_3\bm{c}=0\),可以推出\(k_1=k_2=k_3=0\).
证明:必要性. \(\bm{a,b,c}\)不共面.
反证法.
假设\(k_1,k_2,k_3\)不全为0时\(k_1\bm{a}+k_2\bm{b}+k_3\bm{c}=0\)成立,则由命题5,\(\bm{a,b,c}\)共面. 这与\(\bm{a,b,c}\)不共面条件茅盾,因此\(k_1,k_2,k_3\)必全为0.
充分性. \(k_1\bm{a}+k_2\bm{b}+k_3\bm{c}=0\)成立时,\(k_1=k_2=k_3=0\)
反证法.
假设\(\bm{a,b,c}\)共面,由命题5,\(k_1,k_2,k_3\)必不全为0. 这与\(k_1=k_2=k_3=0\)茅盾,因此\(\bm{a,b,c}\)必共面.
tips:该推论是命题5的逆否命题.
应用
例1 点M在线段AB上的充要条件:存在非负实数λ、μ使得\(\overrightarrow{OM}=\lambda \overrightarrow{OA}+\mu\overrightarrow{OB}且λ+μ=1\),其中O是任意取的一点.
证明:必要性.
∵点M在线段AB上
∴\(\overrightarrow{AM},\overrightarrow{AB}\)同向
有\(\overrightarrow{AM}=k\overrightarrow{AB},0\le k \le 1\)
任取一点O,有
可取λ=1-k,μ=k,则λ+μ=1且λ≥0,μ≥0.
充分性.
如果存在非负实数λ、μ使得\(\overrightarrow{OM}=\lambda \overrightarrow{OA}+\mu\overrightarrow{OB}且λ+μ=1\),其中O是任取的一点. 那么,有
∴\(\overrightarrow{AM},\overrightarrow{AB}\)共线,M在直线AB上
又\(0\le \mu \le 1\)
∴M在线段AB上
tips:该命题是线性坐标插值,坐标证明方式见数学基础:三角形重心坐标插值公式的证明
例2 A、B、C三点共线充要条件:存在不全为0的实数\(\lambda、\mu、\nu\)使得\(\lambda\overrightarrow{OA}+\mu\overrightarrow{OB}+\nu\overrightarrow{OC}=0且\lambda+\mu+\nu=0\),其中O是任取的一点.
证明:必要性.
设A、B、C共线.
则\(\overrightarrow{AB},\overrightarrow{AC}\)共线
∴存在不全为0的实数k,l使得\(k\overrightarrow{AB}+l\overrightarrow{AC}=0\)(命题2)
∴
可取\(\lambda=-(k+l),\mu=k,\nu=l\),于是有
充分性.
设存在不全为0的实数\(\lambda、\mu、\nu\)使得\(\lambda\overrightarrow{OA}+\mu\overrightarrow{OB}+\nu\overrightarrow{OC}=0且\lambda+\mu+\nu=0\).
则有,
∵\(\lambda,\mu,\nu\)不全为0且\(\lambda+\mu+\nu=0\)
∴\(\mu,\nu\)不全为0
∴\(\overrightarrow{AB},\overrightarrow{AC}\)共线
∴A、B、C三点共线.
仿射标架下的三点共线条件
定理2 在三个点A,B,C所在的平面上取一个仿射标架\([O;\bm{e_1,e_2}]\),设A,B,C坐标分别为\((x_1,y_1),(x_2,y_2),(x_3,y_3)\),则A、B、C三点共线充要条件:
\[\begin{vmatrix} x_1 & x_2 & x_3\\ y_1 & y_2 & y_3\\ 1 & 1 & 1 \end{vmatrix}=0 \]
证明:
行列式较为复杂,先将行列式简化下. 由于行列式将第i行(或列)乘以常数,然后再加到第j行(或列),行列式值不变,有
必要性.
设A、B、C三点共线.
则\(\overrightarrow{CA},\overrightarrow{CB}\)共线
∴存在不全为0的实数λ、μ使得\(\lambda \overrightarrow{CA}+\mu \overrightarrow{CB}=0\)
该式写成坐标形式:
关于x、y的齐次线性方程组:
有非零解\(x=\lambda,y=\mu\)的充要条件为系数矩阵的行列式为0(见余胜春编《线性代数》.2009 P102推论2),即
充分性.
设行列式值为0,说明上面的齐次线性方程组有非零0解:\(x=\lambda,y=\mu\),可使得\(\lambda \overrightarrow{CA}+\mu \overrightarrow{CB}=0\)
此时,A、B、C共线.
定理3 设向量\(\bm{a,b}\)在空间仿射标架\([O;\bm{e_1,e_2,e_3}]\)中坐标分别是\((a_1,a_2,a_3),(b_1,b_2,b_3)\). 则\(\bm{a,b}\)共线充要条件:
\[\begin{vmatrix} a_1 & b_1\\ a_2 & b_2 \end{vmatrix} =\begin{vmatrix} a_1 & b_1\\ a_3 & b_3 \end{vmatrix} =\begin{vmatrix} a_2 & b_2\\ a_3 & b_3 \end{vmatrix} =0 \]
证明:必要性.
设\(\bm{a,b}\)共线.
当\(\bm{a}=0\)时,结论显然成立.
当\(\bm{a}\neq 0\)时,存在实数λ使得\(\bm{b}=\lambda\bm{a}\),有,
进而有
同理,
充分性.
设行列式值为0. 有
如果\(\bm{a,b}\)中有一个为0,则\(\bm{a,b}\)显然共线;
如果\(\bm{a,b}\)都不是0,不妨设\(a_1\neq 0, b_1\neq 0\)(其他情况类似)
有
令\(k=\frac{b_1}{a_1}\)
∴\(\bm{b}=(b_1,b_2,b_3)=(b_1,\frac{b_1}{a_1}a_2,\frac{b_1}{a_1}a_3)=k(a_1,a_2,a_3)=k\bm{a}\)
∴\(\bm{a,b}\)共线.
线段的定比分点
这里从分点角度,对线性插值做了更详细描述,参见数学基础:三角形重心坐标插值公式的证明
对于线段AB(A≠B),如果点C满足\(\overrightarrow{AC}=\lambda \overrightarrow{CB}\),则称点C分线段AB成定比λ.
当λ>0时,\(\overrightarrow{AC},\overrightarrow{CB}\)同向,点C是线段AB内部的点,称C为内分点;
当λ<0时,\(\overrightarrow{AC},\overrightarrow{CB}\)反向,C是线段AB外的一点,称C为外分点;
当λ=0时,C与A重合.
假如λ=-1,则\(\overrightarrow{AC}=-\overrightarrow{CB}\),即\(\overrightarrow{AB}=0\)这与A≠B茅盾,因此λ≠-1.
命题6 设A、B坐标分别为$(x_1,y_1,z_1)、(x_2,y_2,z_2),则分线段AB成定比λ(λ≠-1)的分点C坐标:
\[x=\frac{x_1+\lambda x_2}{1+\lambda},y=\frac{y_1+\lambda y_2}{1+\lambda},z=\frac{z_1+\lambda z_2}{1+\lambda} \]
证明:设C坐标(x,y,z),则\(\overrightarrow{AC}=\lambda \overrightarrow{CB}\),坐标形式:
可得
其中,\(\lambda=\frac{|\overrightarrow{AC}|}{|\overrightarrow{CB}|}\)
空间直线和平面
仿射坐标系中的平面
仿射坐标系下,如何表示一个平面?
我们知道,确定一个平面的条件(or):
1)不在一条直线上的3个点;
2)一条直线+直线外一点;
3)2条相交直线;
4)2条平行直线.
为方便使用向量法,用1个点+2个不共线向量(相当于2条相交直线)确定一个平面.
问题转换为数学描述:
选定一个仿射标架\([O;\bm{e_1},\bm{e_2},\bm{e_3}]\). 已知点\(M_0(x_0,y_0,z_0), \vec{v_1}=(X_1,Y_1,Z_1), \vec{v_2}=(X_2,Y_2,Z_2)\),其中\(\vec{v_1},\vec{v_2}\)不共线. 现在要求点\(M_0\)和\(\vec{v_1},\vec{v_2}\)确定的平面π的方程.
点M(x,y,z)在平面π的充要条件:\(\overrightarrow{M_0M}\)与\(\bm{v_1}, \bm{v_2}\)共面.
∵\(\bm{v_1}\nparallel \bm{v_2}\)
∴\(\overrightarrow{M_0M},\bm{v_1},\bm{v_2}\)共面的充要条件为存在实数λ, μ使得:
- 参数方程
用坐标形式(方程组)表示:
上式称为平面π的参数方程,其中λ,μ称为参数,可以是任意实数.
tips:确定仿射标架后,再确定一个点M,如果它到原点的向量能用2个基向量线性表示,那么,该点M的集合就是基向量所确定的平面.
- 普通方程
由解析几何笔记:向量的外积中三向量共面条件知,向量\(\bm{a}(a_1,a_2,a_3),\bm{b}(b_1,b_2,b_3),\bm{c}(c_1,c_2,c_3)\)共面的充要条件混合积为0,即\(\bm{a}\times\bm{b}=\bm{c}\),对应坐标表示:
∴\(\overrightarrow{M_0M}\)与\(\bm{v_1}, \bm{v_2}\)共面的充要条件:
按第1列展开后可得,
其中,
上式称为平面的普通方程.
定理2 设平面π方程:\(Ax+By+Cz+D=0\),则向量\(\bm{ω}(r,s,t)\)//π的充要条件:\(Ar+Bs+Ct=0\).
证明:
∵向量\(\bm{ω}\)//π, \(v_1,v_2\)位于平面π
∴\(\bm{ω,v_1,v_2}\)共面
根据三向量共面条件知,\(\bm{ω,v_1,v_2}\)共面充要条件:
可得,
思考:能否由平面π方程,得到平面上2个不共线向量?
答案是可以的. 下面进行推导.
平面π方程的方程中,A、B、C不能全为0,否则(x,y,z)可以任意取值,其集合就不是平面了. 不妨设A≠0,则有
要求平面上2个不共线向量,也就是要得到2个不共线的向量\(\bm{ω_1,ω_2}\)满足上式.
不妨取\(\bm{ω_1}=(-\frac{B}{A},1,0),\bm{ω_2}=(-\frac{C}{A},0,1)\).
推论1 设平面π方程:\(Ax+By+Cz+D=0\),则平面π//x轴(或y轴、z轴)的充要条件是A=0(或B=0、C=0);平面π通过原点的充要条件是D=0.
证明:x轴+方向单位向量\(\bm{e_1}(1,0,0)\).
由定理2知,\(\bm{e_1}\)//平面π充要条件:
同理,对于y轴(\(\bm{e_2}(0,1,0)\))、z轴(\(\bm{e_3}(0,0,1)\))也分别能得到类似结论:B=0、C=0.
下面证平面π通过原点的充要条件.
必要性:平面π通过原点\(O(0,0,0)\)
那么O必位于平面π方程,即\(A\cdot 0+B\cdot 0+C\cdot 0+D=0\implies D=0\)
充分性:D=0
有\(A\cdot 0+B\cdot 0+C\cdot 0+D=0\)
即原点\((0,0,0)\)位于平面π.
定理3 在空间中取定一个仿射坐标系,则平面的方程必定是三元一次方程;反之,任意一个三元一次方程表示一个平面.
证明:
前半部:
由前面平面的普通方程的推导,知平面的方程必定是形如\(Ax+By+Cz+D=0\)的三元一次方程.
后半部:
思路:用一个三元一次方程构造一个平面.
任意给定一个三元一次方程:\(A_1x+B_1y+C_1z+D_1=0\),A、B、C不能同时为0,否则方程与x、y、z无关,就不是三元一次方程.
不妨设A≠0. 取点\(M_1(-\frac{D_1}{A_1},0,0)\),取向量\(\bm{μ_1}(-\frac{B_1}{A_1},1,0),\bm{μ_2}(-\frac{C_1}{A_1},0,1)\).
显然,\(\bm{μ_1},\bm{μ_2}\)不共线(否则\(\bm{μ_1}//\bm{μ_2}\)). 那么,由1点+2向量决定的平面方程为:
也就是说,方程\(A_1x+B_1y+C_1z+D_1=0\)对应由点\(M_1\)、向量\(\bm{μ_1},\bm{u_2}\)唯一决定的平面.
两平面的位置关系
两平面位置关系有3种:
1)相交于一条直线;
2)平行;
3)重合.ggggggggggggggg
已知平面方程,如何判定位置关系?
定理4 取定一个仿射标架,设2平面\(π_1,π_2\)方程分别为:
\[A_1x+B_1y+C_1z+D_1=0,\\ A_2x+B_2y+C_2z+D_2=0. \]
则
1)\(π_1,π_2\)相交的充要条件:方程的一次项系数不成比例;
2)\(π_1,π_2\)平行的充要条件:方程的一次项系数成比例,但常数项不与这些系数成比例;
3)\(π_1,π_2\)平行的充要条件:方程的所有系数成比例(包括常数项).
证明:
充分性.
1)设\(π_1,π_2\)方程的一次项系数不成比例,则向量\(\bm{a_1}=(A_1,B_1,C_1),\bm{a_2}=(A_2,B_2,C_2)\)不共线.
因此,下面式子至少有一个成立
写成行列式形式:
至少有一个行列式值不为0,否则\(\bm{a,b}\)共线(定理3).
不妨设第一个行列式值不为0,则可令方程组z=0,可得到x、y的非齐次线性方程组:
线性方程组系数行列式不为0,即系数矩阵的秩R=2(R=n),则方程组有唯一解,设为\((x_0,y_0)\).
那么,\((x_0,y_0,0)\)就是\(π_1,π_2\)联立的方程组的解,这也是\(π_1,π_2\)在z=0时的唯一解.
z=0时,\(π_1\)方程变换为\(A_1x+B_1y+D_1=0\),有无数个解(几何图形是一条直线),除了\((x_0,y_0,0)\),其他点都不在\(π_2\)上,因此,两平面\(π_1,π_2\)既不是重合,又不是平行关系,只能是相交.
2)设方程组一次项系数成比例,但不包括常数项.
即存在实数λ≠0使得\((A_2,B_2,C_2)=\lambda(A_1,B_1,C_1)\)
代入\(π_1,π_2\)方程组:
可得
∵常数项不成比例
∴\(D_1\neq \frac{D_2}{\lambda}\)
∴方程组无解,即\(π_1,π_2\)平行
3)设方程组一次项系数成比例,包括常数项.
即存在实数λ≠0使得\((A_2,B_2,C_2,D_2)=\lambda(A_1,B_1,C_1,D_1)\)
代入\(π_1,π_2\)方程组:
可见两个方程的解完全相同,即\(π_1,π_2\)重合.
必要性. 反证法.
1)设\(π_1,π_2\)相交.
假设一次项系数成比例,则\(π_1,π_2\)平行或重合. 与条件矛盾,故只能相交.
2)3)证法类同.
三平面交于一点
命题7 设三个平面在仿射坐标系中方程分别为:
\[A_1x+B_1y+C_1z+D_1=0,\\ A_2x+B_2y+C_2z+D_2=0,\\ A_3x+B_3y+C_3z+D_3=0. \]
则三平面恰好交于一点的充要条件:
证明:
根据克拉默法则,方程组解有唯一解的充要条件是系数行列式不为零(见余胜春编《线性代数》.2009 P96),即
参考
[1]丘维声.解析几何[M].北京大学出版社,2017.