1.算法描述
YOLOv4 的深层网络包括 SPP 模块、PANet 模块、YOLO Head 模块和部分卷积,其主要作用是加强目标特征提取并获取预测结果。SPP 模块的输入端和输出端各连接一个三次卷积块,每个三次卷积块包含 2 个 1×1 卷积和 1 个 3×3 卷积。 PANet 模块包含特征层堆叠、上采样和下采样,每次堆叠后连接一个五次卷积块,每个五次卷积块包含 3 个 1×1 卷积和 2 个 3×3 卷积。每个 YOLO Head 都由 1 个3×3 卷积和 1 个 1×1 卷积组成。可以看出 YOLOv4 深层网络含有大量 3×3 标准卷积,借鉴 MobileNet 的思想把三次卷积块、五次卷积块、YOLO Head 和下采样中的 3×3 标准卷积替换为深度可分离卷积,大幅度降低深层网络的计算量和参数量,从而使整个网络模型轻量化。
1、开发了一个简单高效的目标检测算法,降低了训练门槛:仅使用一块GPU:1080TI,就可以训练一个又快又准的检测器;
2、验证了最新的Bag-of-Freebies和Bag-of-Specials在训练过程中对YOLOV4的影响;
3、优化了一些最新提出的算法:CBN,PAN,SAM,使YOVOV4可在一块GPU上训练。
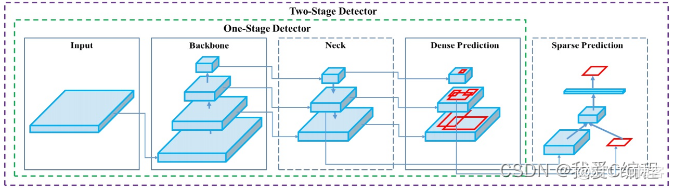
一个完整的网络模型一般包含四部分:
1)输入部分:算法的输入,整个图像,一个PATCH或图像金字塔
2)主干网络:提取图像的特征,浅层特征如:边缘,颜色,纹理等。可以使用设计好并训练好的网络:VGG16,19,RESNET50,RexNeXt101,Darknet53,当然,还有一些轻量级的网络:MobileNet1,2,3 ,ShuffleNet1,2
3)瓶颈部分:特征增强,对主干网提取到的特征进行加工,增强。典型的有:SPP,ASPP,RFB,SAM,还有FPN,PAN,NAS-FPN,BiFPN,ASFF,SFAM。
4)检测头:算法项的输出。
如想得到HeatMap(CenterNet),就增加一些反卷积;
如想得到BBOX,就接CONV来输出结果,如:YOLO,SSD;
如想输出多任务(MaskRCNN)那就输出三个Head:分类Classification ,回归Regression ,分割Segmentation
2、训练策略
2.1 Bag-of-freebies
在不增加模型复杂度的情况下,使用一些比较有用的训练策略来提升准确率,如:Data augmentation
2.1.1 数据增强
增加训练样本的多样性,使模型有更高的鲁棒性。
[1]逐像素pixel-wise
(1)几何增强:随机翻转,随机裁剪,拉伸,旋转
(2)色彩增强:对比度增强,亮度增强,HSV空间增强(较关键)
[2]逐块block-wise
(1) 在图像中随机裁剪矩形区域,用0填充(cutout)
(2) 随机裁剪多个矩形区域(grid mask)
(3)在Heatmap上裁剪并填充(dropout,dropconnect,dropblock)
[3] Mixup
将两个图像按不同比例相加,a*0.1+b*0.9=c。
2.1.2 解决数据不平衡
数据不平衡分两种:
一、背景和要识别物体之间的不均衡
如:在两阶段方法中,RPN阶段会生成很多ROI,里面有太多背景,有用的框很少;
二、类别不平衡
识别物体间不同类别间的不平衡,涉及到一个长尾分布。需要使用OHEM(困难样本挖掘)或Focal loss,或Label smooth
2.1.3 修改Loss函数
最早是MSE,现在是NMS(IOU),然后是GIOU Loss。
2.2 Bag-of=Specials
通过增加少量的计算,能有效增加物体检测的准确率。
2.2.1 增大感受野
SPP:解决输入尺寸不一致,按比例1,2,4或1,2,3三个尺度划分Pooling,输出相同大小FeatureMap
ASPP:在SPP前加了Atrous或Dilated
RFB:在同一个FeatureMap下,引入不同dilated ratio的空洞卷积,提取到不同的感受野,最后进行融合
2.2.2 注意力机制
channel attention:SENet,在FeatureMap层中同时引入一个1x1xC的weights,可以对每个channel上的特征加入不同权重,提高特征学习能力。
Spatial attention:在HW维度上加入attention。
Channel+Spatial:channel attention和spatial attention融合。
2.2.3 特征融合或特征集成
skip connection:在Encoder-decoder中比较多,如:UNet,融合底层和高层的特征信息;
hyper-column:就像InceptionV4结构,使用不同的kernel-size的卷积来集成特征;
FPN,ASFF,BiFPN:将不同阶段的不同尺度的特征进行融合。EfficientDet中BiFPN连接最密集;
2.2.4 激活函数
一个好的激活函数既能使得梯度传播更高效,同时不会占用额外的计算资源。
ReLU
LReLU、PreLU、 SELU、ReLU6、Swish、Hard-Swish、Mish
2.2.5后处理
NMS,SoftNMS,DIoU NMS
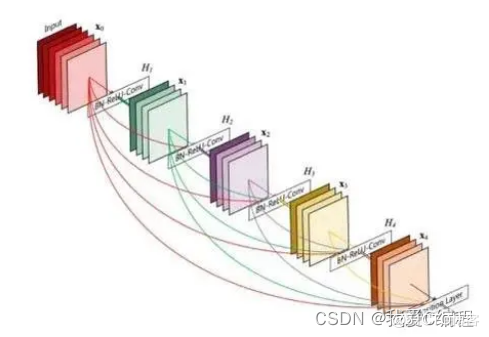
为了提升准确度,我们可通过提高网络深度来扩展感受野和增大模型复杂度。同时,为了降低训练难度,还可应用跳过连接。我们还可以进一步延伸这一概念,即使用高度互连的层。
密集模块(Dense Block)包含多个卷积层,其中每一层 H_i 都由批归一化、ReLU 与之后的卷积构成。H_i 的输入不仅包含前一层的输出,还包含之前所有层的输出以及原始输入,即 x_, x_, …, x_{i-1}。下图中每个 H_i 都输出 4 个特征图。因此,在每一层,特征图的数量都增加 4 倍——增长率。
2.仿真效果预览
matlab2022a仿真结果如下:


3.MATLAB核心程序
inputLayer = imageInputLayer(imageSize);
.....................................................................
bnecker1 = bneckLayer(Fsize33,numFilters1);
bnecker2 = bneckLayer(Fsize33,numFilters2);
bnecker3 = bneckLayer(Fsize33,numFilters2);
bnecker4 = bneckLayer(Fsize55,numFilters3);
bnecker5 = bneckLayer(Fsize55,numFilters3);
bnecker6 = bneckLayer(Fsize55,numFilters3);
bnecker7 = bneckLayer(Fsize55,numFilters4);
bnecker8 = bneckLayer(Fsize55,numFilters4);
bnecker9 = bneckLayer(Fsize55,numFilters5);
bnecker10 = bneckLayer(Fsize55,numFilters5);
bnecker11 = bneckLayer(Fsize55,numFilters5);
Fsize33b = [GPv(8) GPv(8)];%3*3维卷积
numFilters3b = GPv(9);
MobilenetV3Layer = [convolution2dLayer(Fsize33b,numFilters3b,'Padding',2)
bnecker1
bnecker2
bnecker3
convolution2dLayer([1 1],8,'Padding',2)
batchNormalizationLayer()
reluLayer()
];
%%
Resizelayer = [];
Fsize11 = [1 1];
%Necklayer:SPP+PANET
Fsize77 = [GPv(8) GPv(8)];%7*7维卷积
numFilters4 = GPv(10);
numFilters5 = GPv(11);
NECKlayer = func_neck(Fsize77,numFilters4,Fsize33,numFilters5);
%%
finalLayers = [fullyConnectedLayer(128)%全连接层
reluLayer
fullyConnectedLayer(NClass)
softmaxLayer
classificationLayer
];
%%
layers = [inputLayer;
FPNlayer;
MobilenetV3Layer;
NECKlayer;
finalLayers
];
...............................................
%调用训练库,GPU强,则可以扩充
load train3.mat
nets = trainObjectDetector(gTruth,layers,options,'NegativeOverlapRange', [0 0.02], 'PositiveOverlapRange', [0.02 1])