ROS 命令行的使用
以小海龟为例
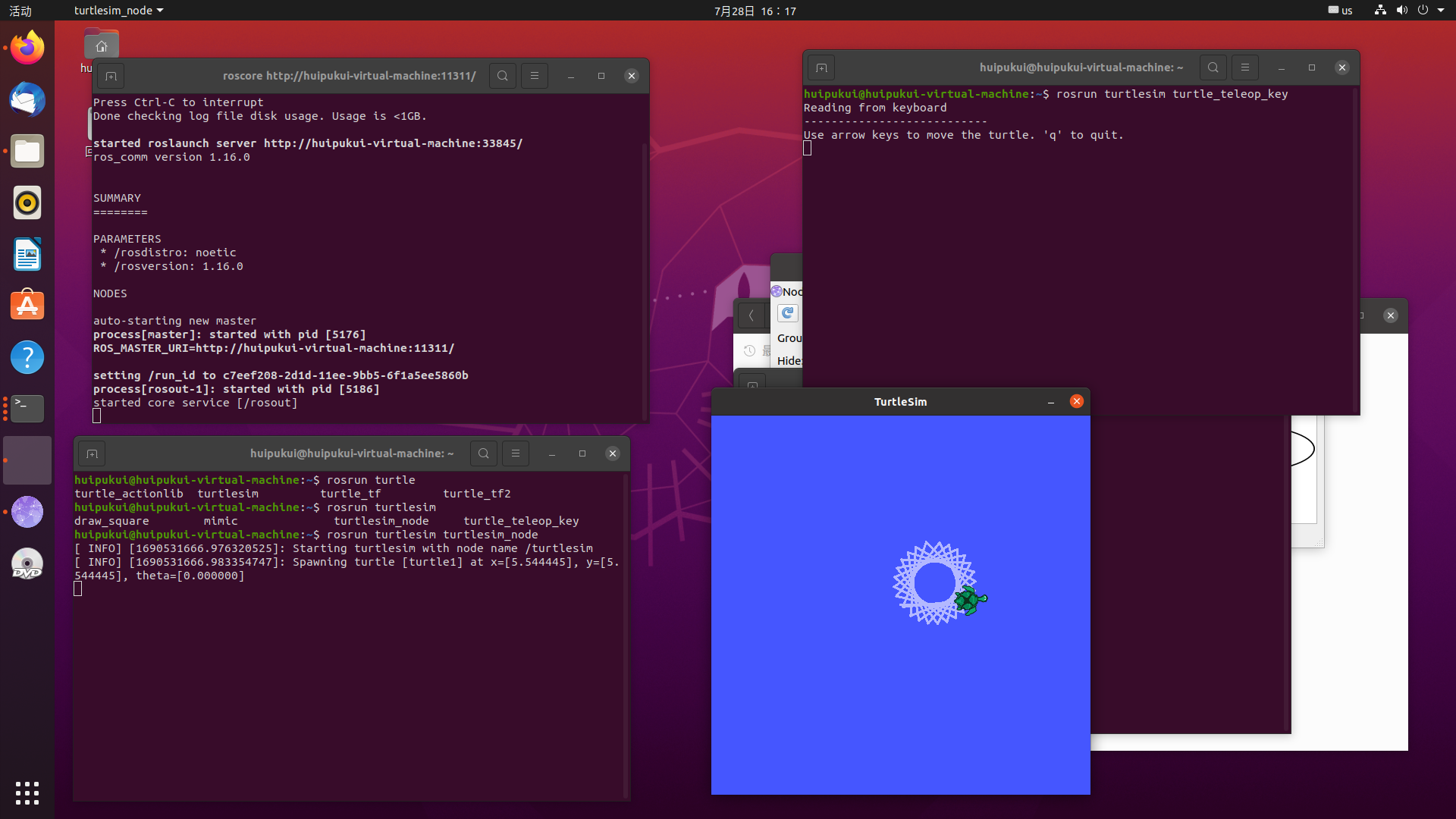
启动 ROS Master
$ roscore
启动小海龟仿真器
$ rosrun turtlesim turtlesim_node
启动海龟控制节点
$ rosrun turtlesim turtle_teleop_key
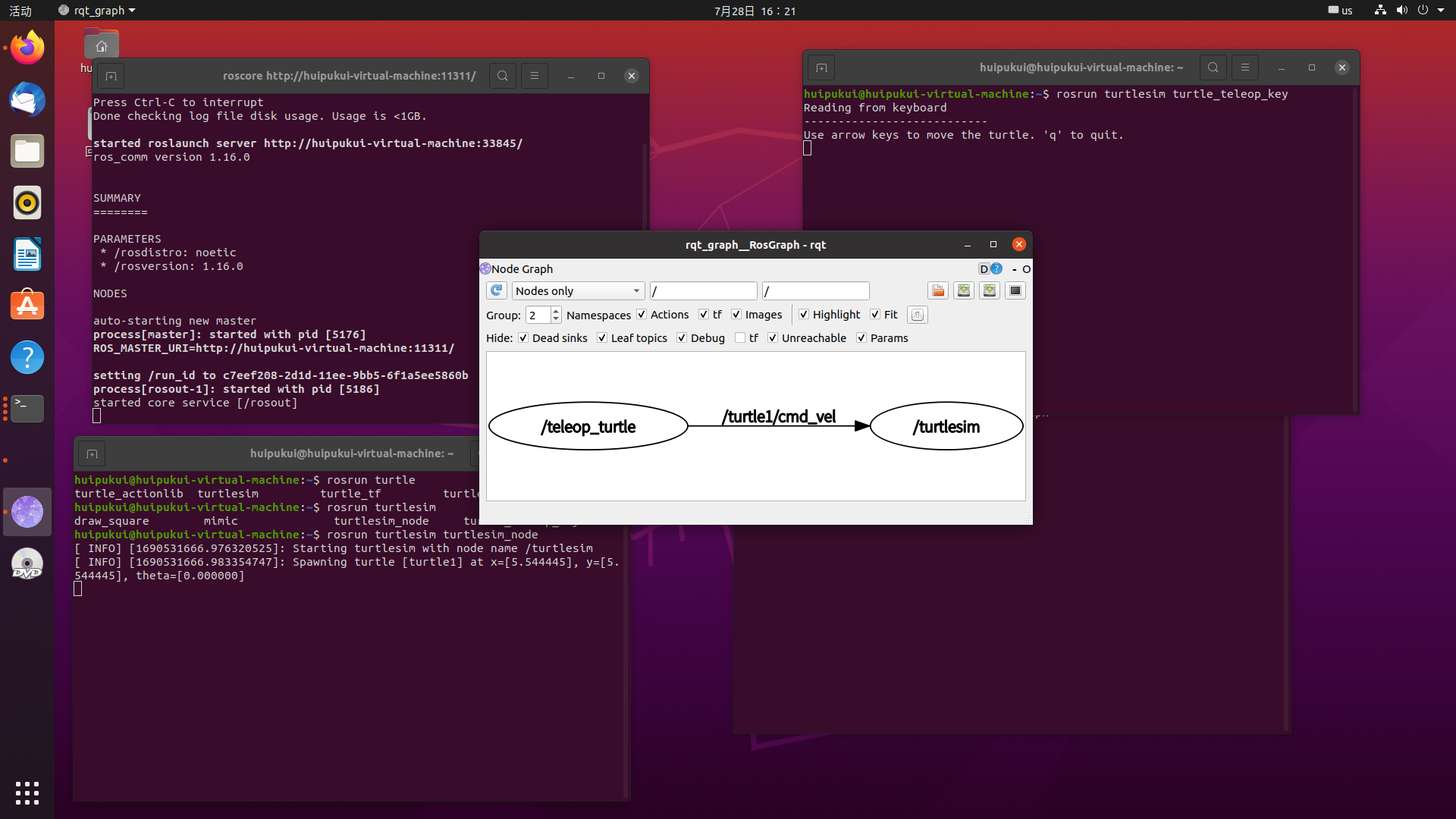
用以显示系统计算图类工具
rqt_graph
显示系统中所有节点相关的指令 rosnode
将所有系统当中的节点都列出来
$ rosnode list
查看节点信息
$ rosnode info /turtlesim
话题相关的命令行工具 rostopic
话题列表
$ rostopic list
pub 发布数据给某一个 topic
$ rostopic pub 话题名 消息结构 "具体数据"
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
// 海龟会动起来
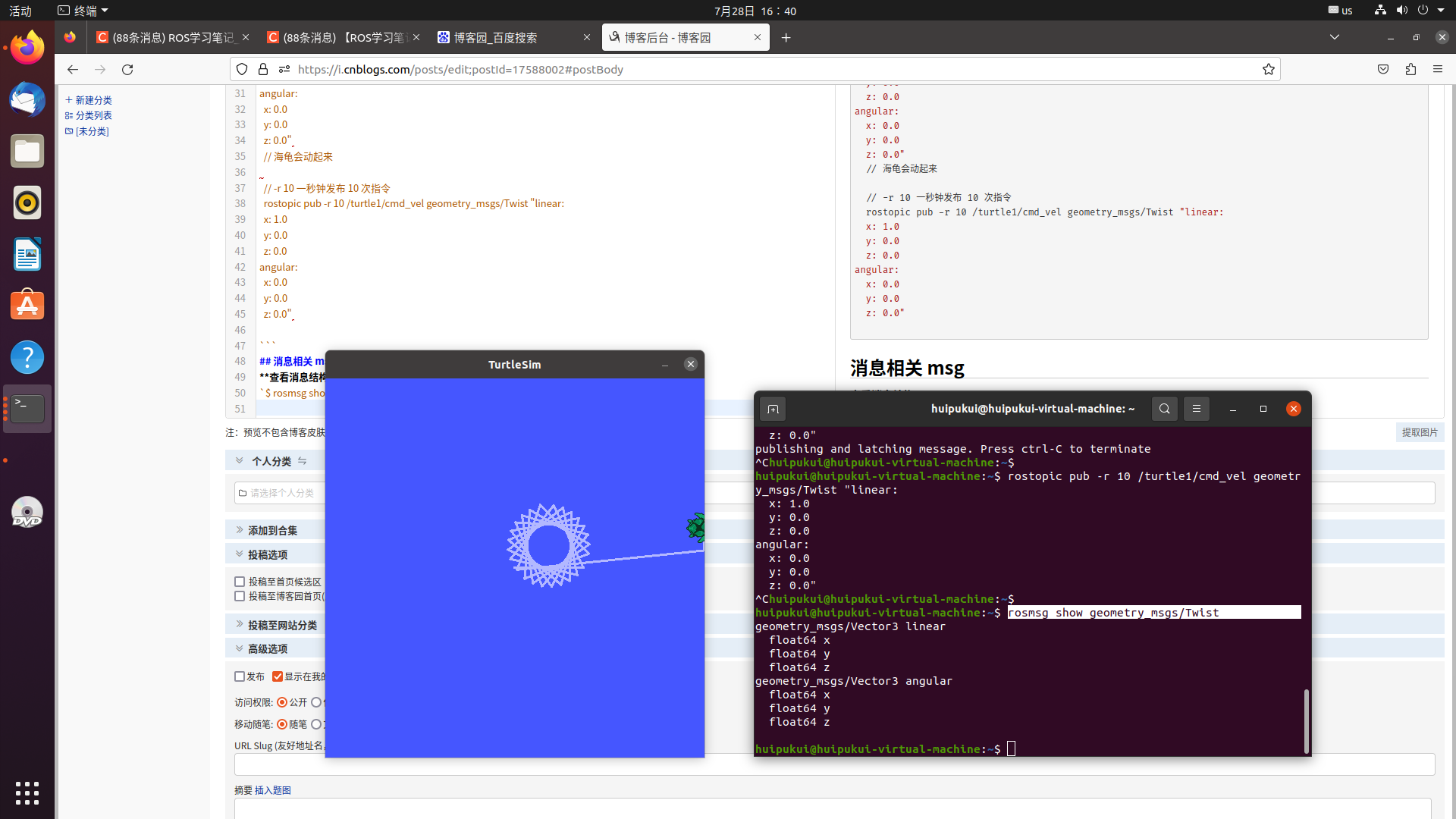
// -r 10 一秒钟发布 10 次指令
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
消息相关 msg
查看消息结构
$ rosmsg show geometry_msgs/Twist
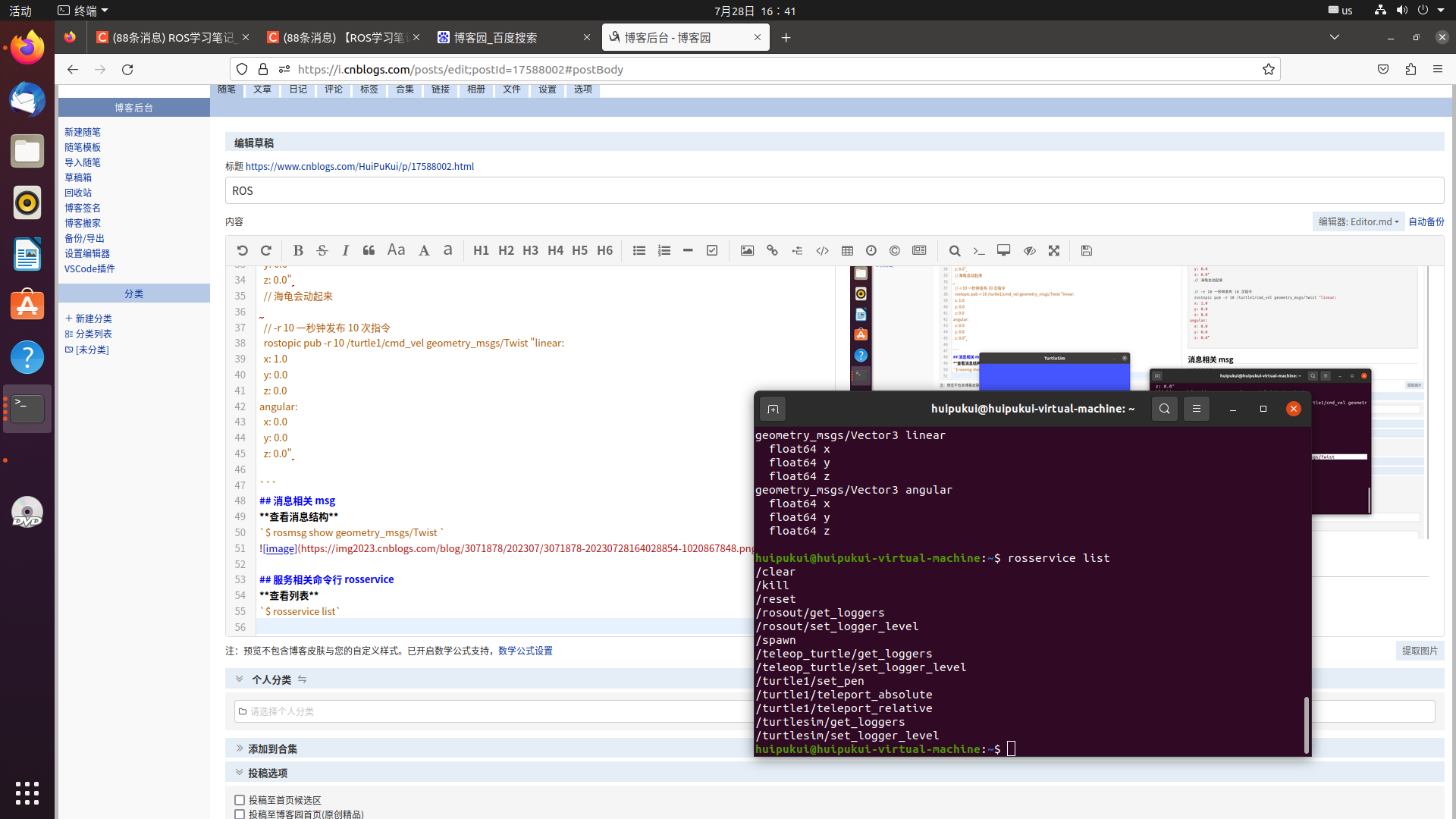
服务相关命令行 rosservice
查看列表
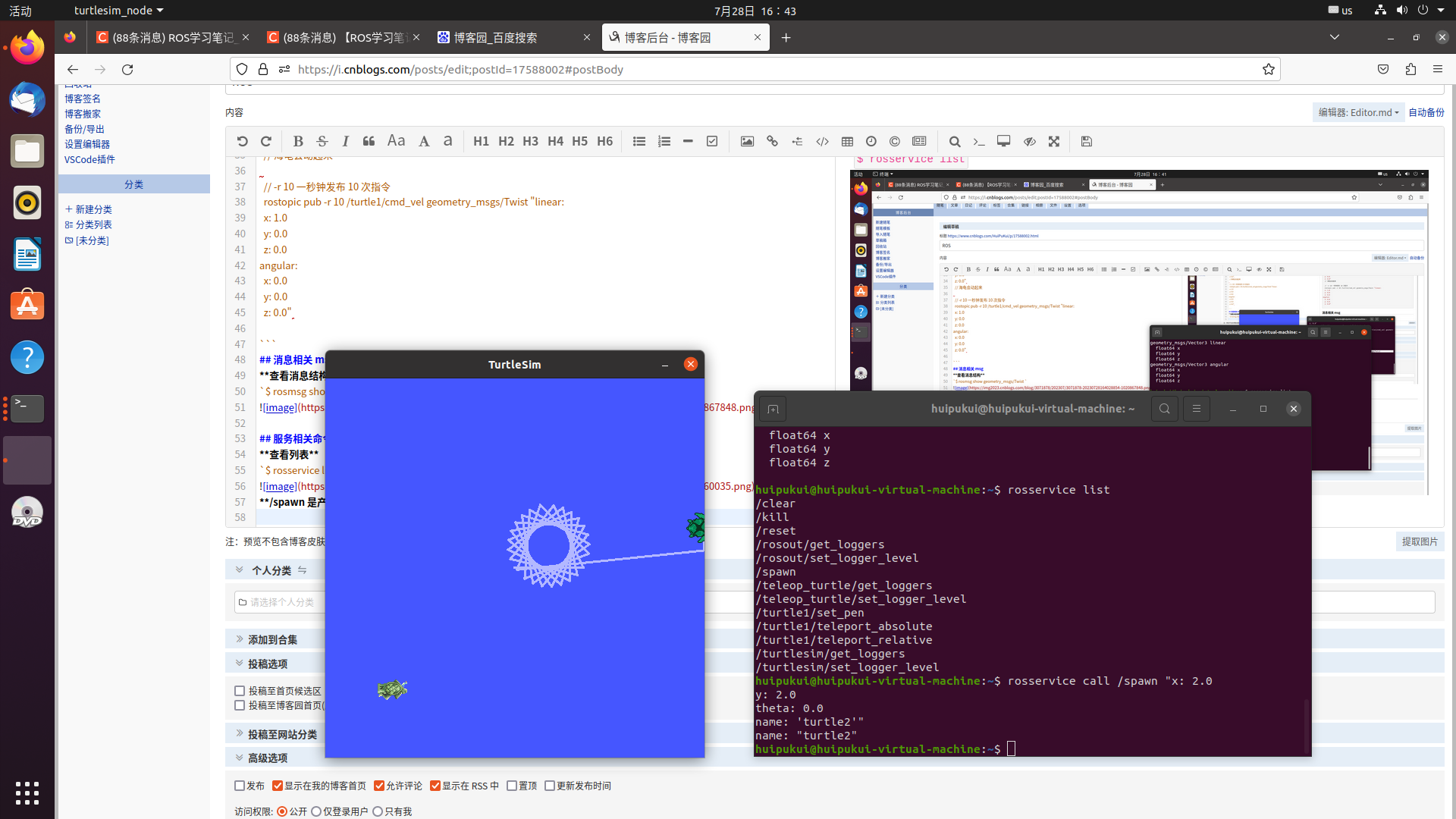
$ rosservice list
/spawn 是产生海龟
$ rosservice call /spawn "x: 2.0
y: 2.0
theta: 0.0
name: 'turtle2'"
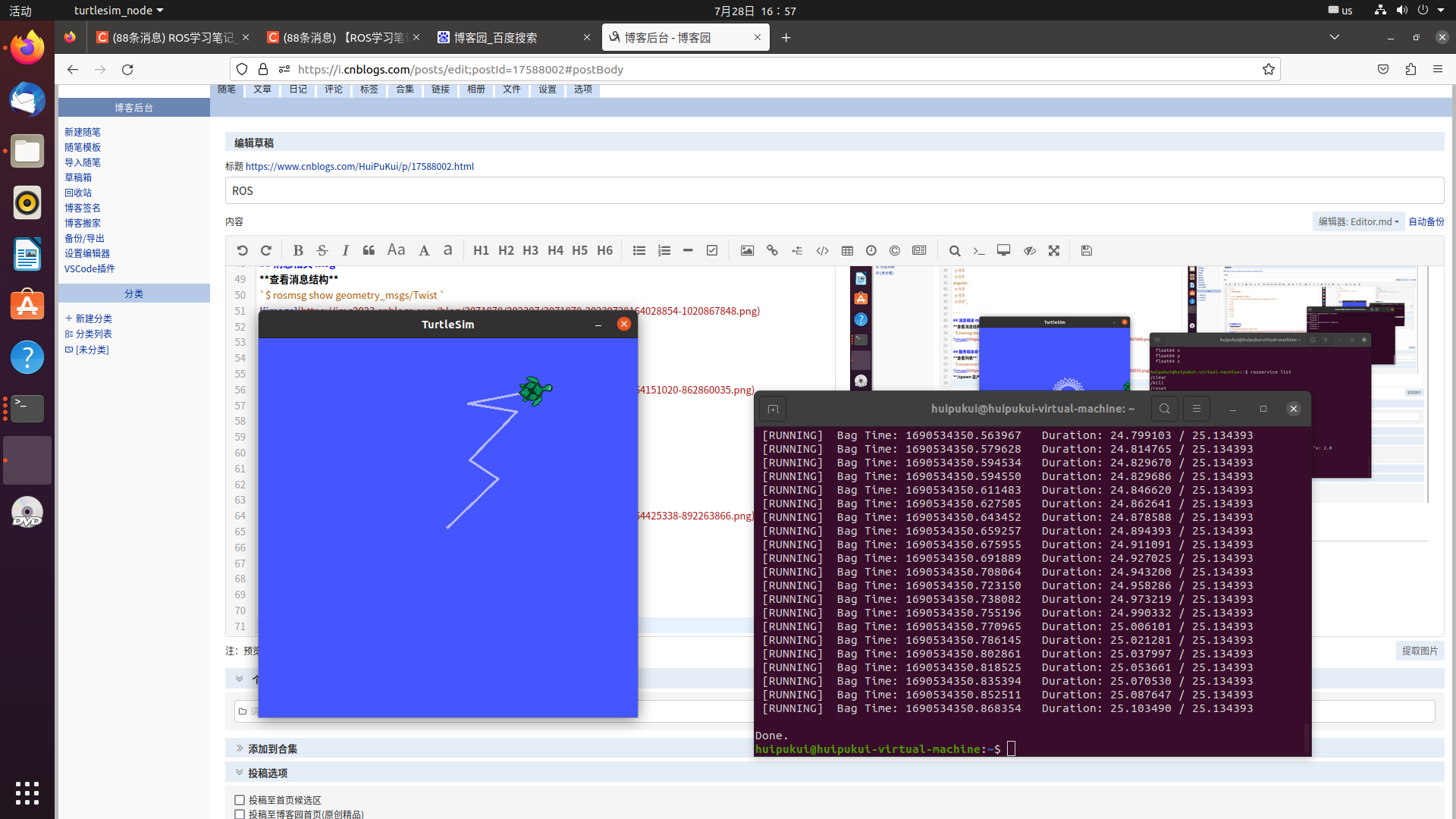
话题记录和复现 rosbag
记录所有数据
$ rosbag record -a -o cmd_record
复现
$ rosbag play cmd_record.bag
创建工作空间与功能包
工作空间(workspace)是一个存放工程开发相关文件的文件夹
- src:代码空间
- build:编译空间
- devel:开发空间
- install:安装空间