1. 功能简介
本设计是基于双目视觉的 SLAM 系统设计与实现,其目的是使用双目摄像头运用 SLAM 系统框架,对室内周围环境进行三维重建。通过对物体实拍的图像序列或图像对来恢复出物体模型,即基于立体视觉的三维重建,其中最为关键的就是图像对应点的确定、双目摄像机的标定、两图像间摄像机运动参数的确定。考虑到手持摄像头会导致画面抖动,出现一定误差,因此选择搭建一个智能小车平台,能够控制相机水平移动,并且可以水平旋转和垂直旋转,将摄像头固定在舵机上,使其可以实现全方位的环境信息采集。
2. 开发环境
在 Ubuntu16.04 系统下,ROS 操作系统上进行,用到 OpenCV、Eigen、G2o、Pangolin、DBoW2 开源库,使用 C++语言,实现基于双目视觉的 SLAM 系统设计与实现。硬件平台在 Arduino IDE 下,使用 Arduino 编程语言开发,选择 Arduino UNO 开发板、32 路伺服舵机控制板、L298P 直流电机驱动板、MG995 数字舵机、NodeMCU模块和小车底座组装自主移动小车,控制Optor摄像头移动。选择 Visual Studio 2013 开发工具,用 MFC 类库创建界面。
3. 整体框架
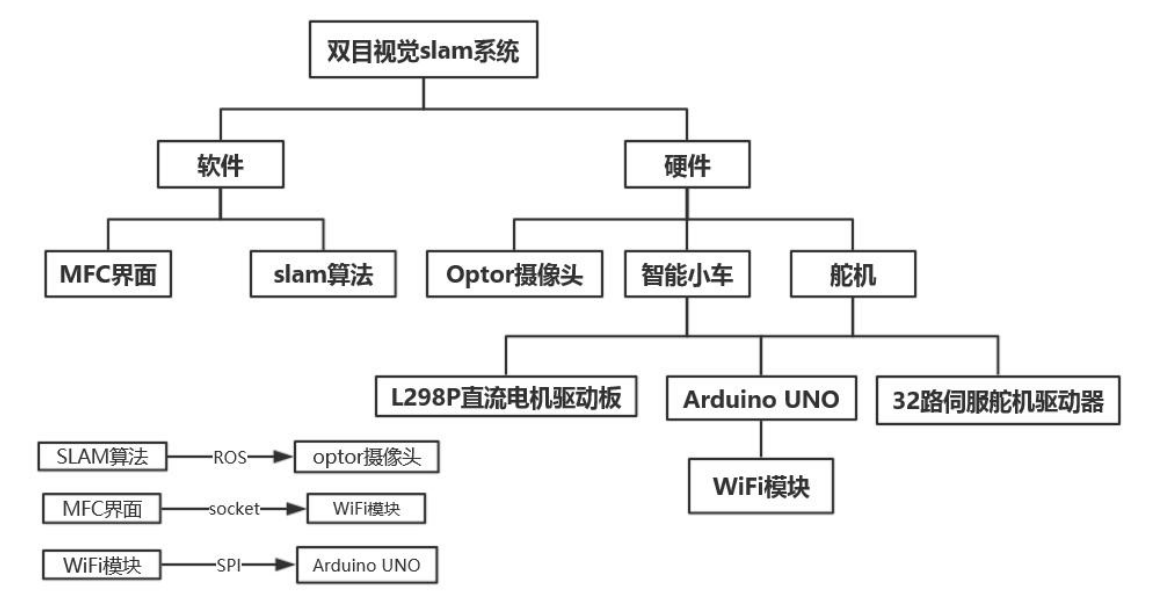
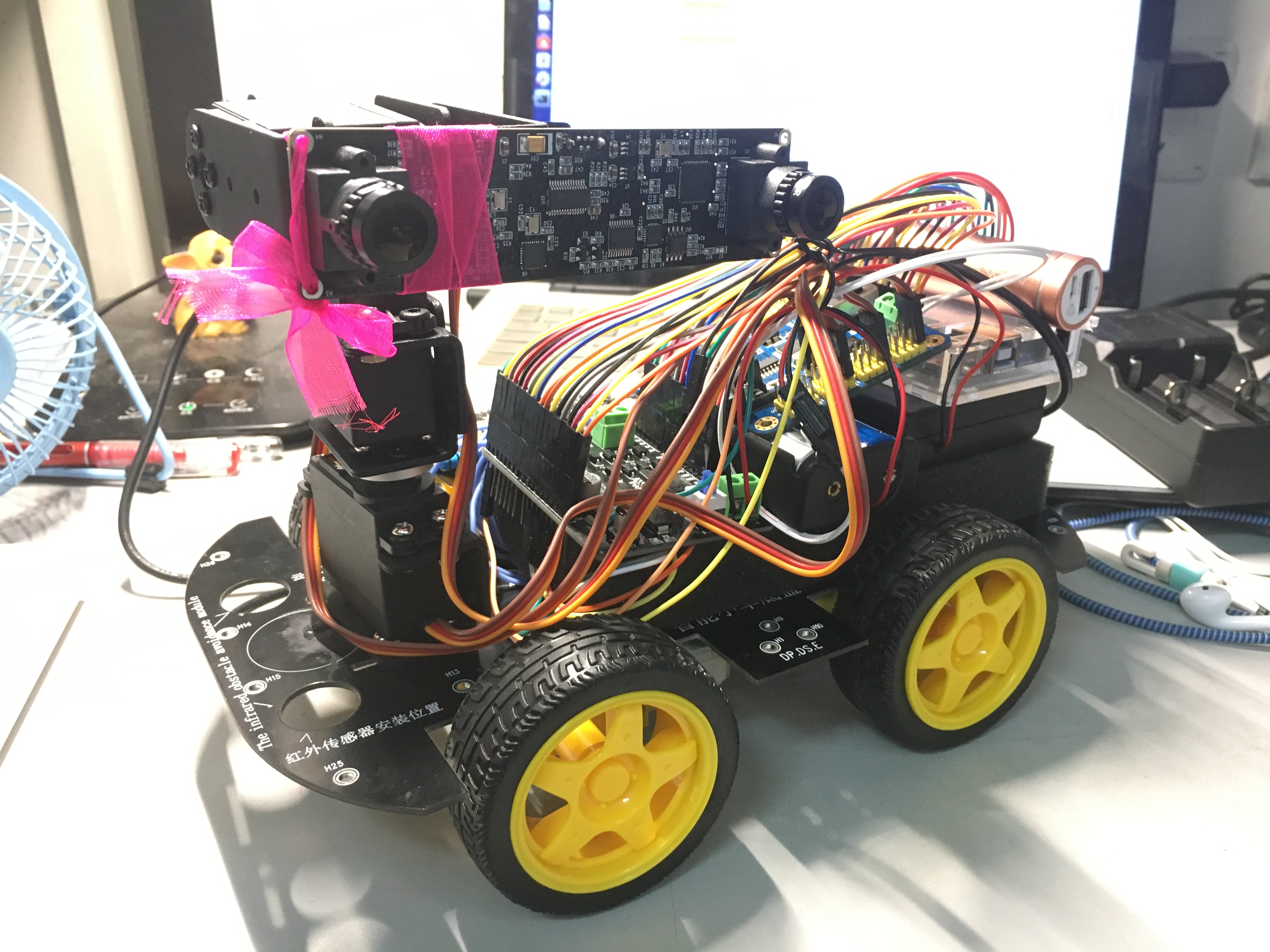
4. 硬件效果图
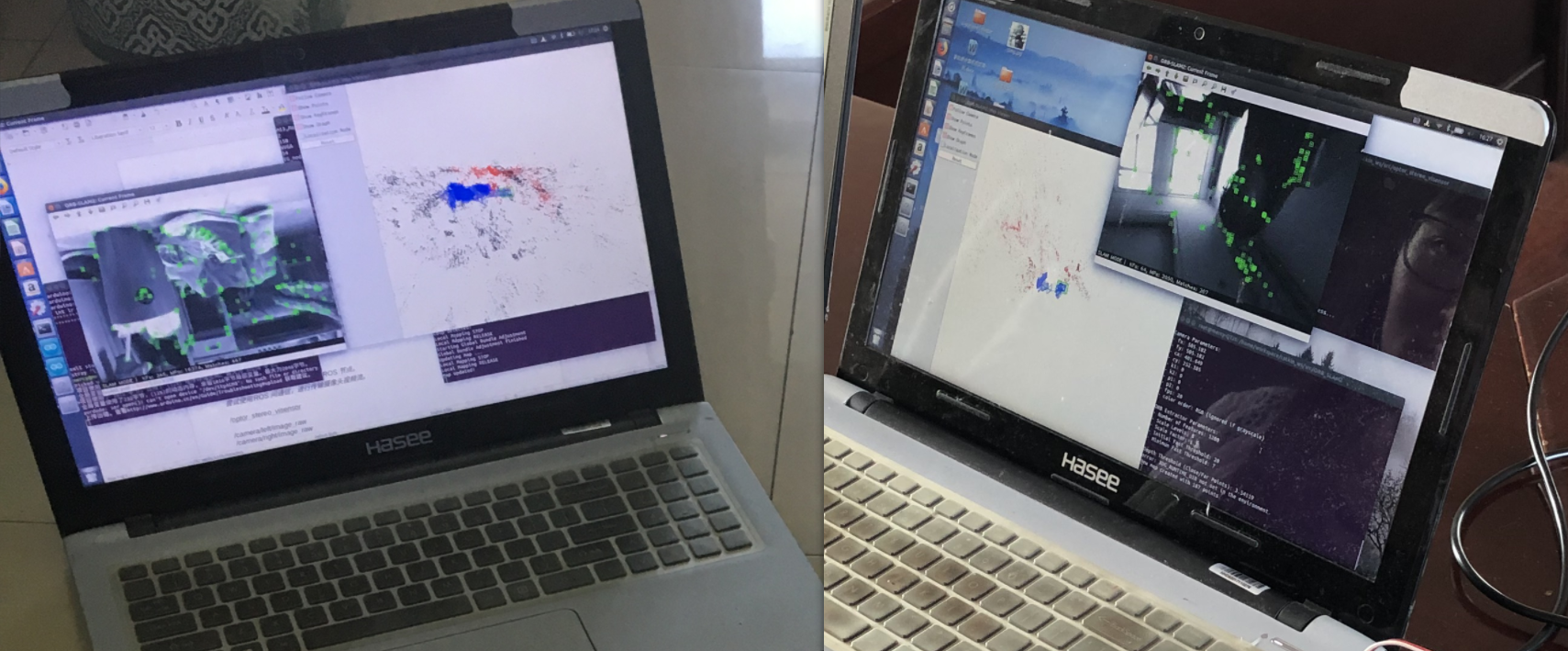
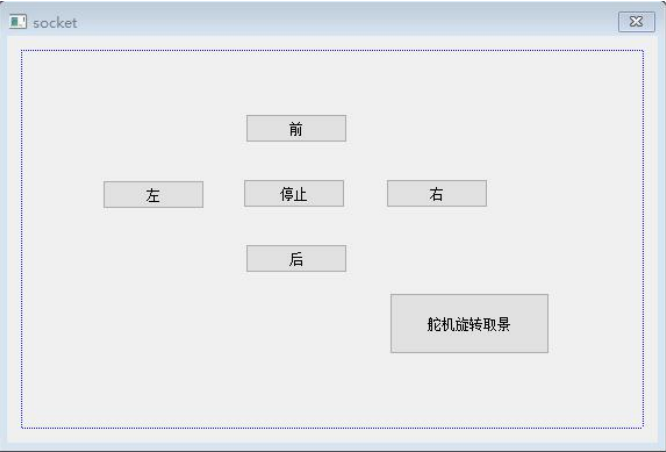
5. 小车遥控端
6. 三维重建点云图