双目
c#对接海康双目客流相机SDK调用示例
c# 调用视频并显示在WinForm的PictureBox控制上面,实现一直播放视频的功能 首先需要使用visual studio nuget 下载安装海康客流相机的SDK包 然后根据以下代码和页面来设计一下 实现逻辑 就可以实现播放实时视频的需求了 private int m_lRealHandl ......
vue3+ts navigator.mediaDevices是一个双目摄像头,读取指定彩色摄像头
在 Vue 3 中使用 TypeScript,你可以通过 `navigator.mediaDevices` 访问设备的媒体流信息,包括摄像头。要读取指定的彩色摄像头,你可以使用 `getUserMedia` 方法来获取指定设备的媒体流。 首先,你需要在组件中引入 `getUserMedia` 方法: ......
基于双目立体视觉的物体体积测量研究_范徐萌.
基于双目立体视觉的物体体积测量研究[D].中国矿业大学,2021. 双目相机的选型: 双目平行式:便于标定,运算简单 视角较小,如果距离物体较近,且两个相机的基线距离不合适的话会出现盲区,对基线的选择要求较高。 双目汇聚式:可以调整相机光轴之间的夹角,不存在盲区问题 模型较为复杂,计算量大,不易于标 ......
双目标定中stereoCalibrate()函数
用于标定立体相机 函数形式 C++:cvStereoCalibrate( const CvMat* object_points, const CvMat* image_points1,const CvMat* image_points2, const CvMat* npoints,CvMat* ca ......
Python-OpenCV双目测距代码实现以及参数解读
# 一、双目相机拍照后使用Matlab进行双目标定 **必看:** USB双目相机的具体标定过程:[https://blog.csdn.net/qq\_40700822/article/details/124251201?spm=1001.2014.3001.5501](https://blog.c ......
YOLO v5与双目测距结合,实现目标的识别和定位测距
### YOLO v5与双目测距结合,实现目标的识别和定位测距 - [1、首先安装YOLO v5](#1YOLO_v5_11) - [2、数据集的标定](#2_14) - [3、双目测距代码的单独运行调试](#3_17) - [4、YOLO v5与双目测距的代码的结合](#4YOLO_v5_20) ......
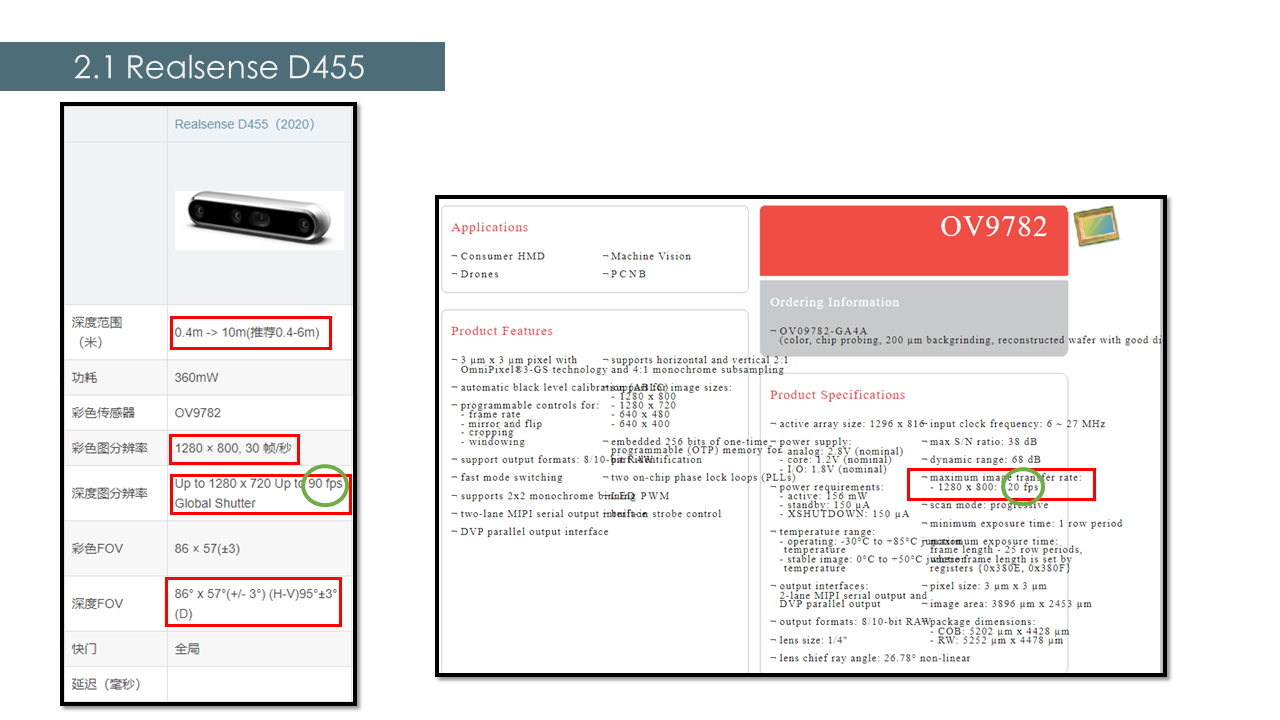
【双目相机产品调研整理】22/12/01
   ## 立体校正得出重投影矩阵 通过立体校正,可用求得重投影矩阵 $Q$。 重投影矩阵 $Q$ 实现了世 ......
OpenCV双目视觉
# OpenCV双目视觉 > 参考资料: > [[双目立体视觉:标定和校正](https://www.zhihu.com/column/c_1339328909662875649) > [双目立体视觉:标定和校正](https://zhuanlan.zhihu.com/p/353311373) > ......
基于双目人脸图像ORB特征提取匹配的人脸三维点云提取和建模的matlab仿真
1.算法理论概述 三维人脸建模是计算机视觉领域的一个重要研究方向。传统的人脸建模方法通常基于单张图像,难以准确地获取人脸的三维信息。而基于双目图像的人脸建模方法则可通过多视角的信息获取,实现更加精确的三维人脸建模。本文提出了一种基于双目人脸图像ORB特征提取匹配的人脸三维点云提取和建模方法,该方法利 ......
双目立体视觉技术杂谈
双目立体视觉技术杂谈 应用光学 双目立体视觉 双目视觉特征 当观察外界物体时,除了能够知道物体的大小、形状、亮暗以及表面颜色以外,还能够产生远近的感觉以及分辨不同的物体在空间的相对位置。这种远近的感觉称为空间深度感觉,对物体的空间位置的分布以及对物体体积的感觉,就是立体视觉。立体视觉无论是用单眼或者 ......
双目立体视觉
平行视图(两个摄像机是平行的) 基础矩阵 对于红色虚线的说明:对极点是在一幅视图中另一个摄像机中心的(比如e'就是O1在右摄像机的像),它也是基线(平移)方向的消影点。 e'的解释,因为所有直线都平行于u轴,又因为u轴的方向单位化后是(1,0),因此所有极线的方向都可以是(1,0)(极线和u轴平行) ......
(毕业设计)基于双目视觉的 SLAM 系统设计与实现
## 1. 功能简介 本设计是基于双目视觉的 SLAM 系统设计与实现,其目的是使用双目摄像头运用 SLAM 系统框架,对室内周围环境进行三维重建。通过对物体实拍的图像序列或图像对来恢复出物体模型,即基于立体视觉的三维重建,其中最为关键的就是图像对应点的确定、双目摄像机的标定、两图像间摄像机运动参数 ......
基于Lucas-Kanade算法的双目图像光流提取matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 1950年,Gibson首先提出了光流的概念,所谓光流就是指图像表现运动的速度。物体在运动的时候之所以能被人眼发现,就是因为当物体运动时,会在人的视网膜上形成一系列的连续变化的图像,这些变化信息在不同时间,不断的流过眼 ......
双目图像深度信息提取matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 深度学习的蓬勃发展得益于大规模有标注的数据驱动,有监督学习(supervised learning)推动深度模型向着性能越来越高的方向发展。但是,大量的标注数据往往需要付出巨大的人力成本,越来越多的研究开始关注如何在不 ......
基于双目图像三维建模算法的测量目标物体体积计算matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 双目立体视觉(Binocular StereoVision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合 ......
分别使用SAD匹配,NCC匹配,SSD匹配三种算法提取双目图像的深度信息
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 深度学习的蓬勃发展得益于大规模有标注的数据驱动,有监督学习(supervised learning)推动深度模型向着性能越来越高的方向发展。但是,大量的标注数据往往需要付出巨大的人力成本,越来越多的研究开始关注如何在不 ......
以色列海法大学开源水下双目惯性数据集!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容 点击领取学习资料 → 机器人SLAM学习资料大礼包 #论文##开源数据集# FLSea: Underwater Visual-Inertial and Stereo-Vision Forward-Looking Datasets 论文地址: ......