1. 创新
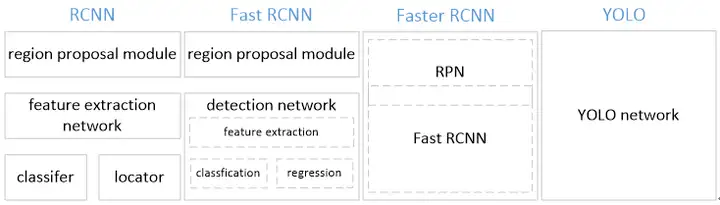
YOLO将物体检测作为回归问题求解。基于一个单独的end-to-end网络,完成从原始图像的输入到物体位置和类别的输出。从网络设计上,YOLO与rcnn、fast rcnn及faster rcnn的区别如下:
[1] YOLO训练和检测均是在一个单独网络中进行。YOLO没有显示地求取region proposal的过程。而rcnn/fast rcnn 采用分离的模块(独立于网络之外的selective search方法)求取候选框(可能会包含物体的矩形区域),训练过程因此也是分成多个模块进行。Faster rcnn使用RPN(region proposal network)卷积网络替代rcnn/fast rcnn的selective
search模块,将RPN集成到fast rcnn检测网络中,得到一个统一的检测网络。尽管RPN与fast rcnn共享卷积层,但是在模型训练过程中,需要反复训练RPN网络和fast rcnn网络(注意这两个网络核心卷积层是参数共享的)。
[2]
YOLO将物体检测作为一个回归问题进行求解,输入图像经过一次inference,便能得到图像中所有物体的位置和其所属类别及相应的置信概率。而rcnn/fast rcnn/faster rcnn将检测结果分为两部分求解:物体类别(分类问题),物体位置即bounding box(回归问题)。
2. 核心思想
2.1 网络定义
YOLO检测网络包括24个卷积层和2个全连接层,如下图所示。
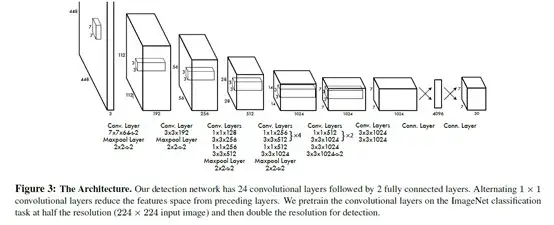
其中,卷积层用来提取图像特征,全连接层用来预测图像位置和类别概率值。
YOLO网络借鉴了GoogLeNet分类网络结构。不同的是,YOLO未使用inception
module,而是使用1x1卷积层(此处1x1卷积层的存在是为了跨通道信息整合)+3x3卷积层简单替代。
YOLO论文中,作者还给出一个更轻快的检测网络fast YOLO,它只有9个卷积层和2个全连接层。使用titan x GPU,fast YOLO可以达到155fps的检测速度,但是mAP值也从YOLO的63.4%降到了52.7%,但却仍然远高于以往的实时物体检测方法(DPM)的mAP值。
2.2 输出representation定义
本部分给出YOLO全连接输出层的定义。
YOLO将输入图像分成SxS个格子,每个格子负责检测‘落入’该格子的物体。若某个物体的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这个物体。如下图所示,图中物体狗的中心点(红色原点)落入第5行、第2列的格子内,所以这个格子负责预测图像中的物体狗。
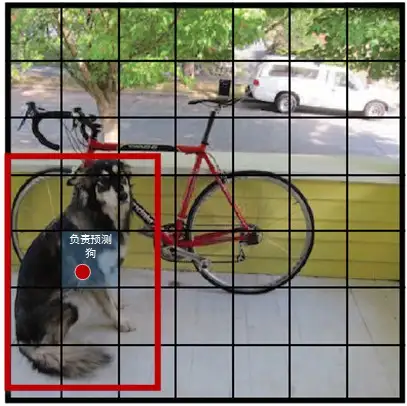
每个格子输出B个bounding box(包含物体的矩形区域)信息,以及C个物体属于某种类别的概率信息。
Bounding box信息包含5个数据值,分别是x,y,w,h,和confidence。其中x,y是指当前格子预测得到的物体的bounding box的中心位置的坐标。w,h是bounding box的宽度和高度。注意:实际训练过程中,w和h的值使用图像的宽度和高度进行归一化到[0,1]区间内;x,y是bounding box中心位置相对于当前格子位置的偏移值,并且被归一化到[0,1]。
confidence反映当前bounding box是否包含物体以及物体位置的准确性,计算方式如下:
confidence = P(object)
* IOU, 其中,若bounding box包含物体,则P(object) = 1;否则P(object) = 0. IOU(intersection over union)为预测bounding
box与物体真实区域的交集面积(以像素为单位,用真实区域的像素面积归一化到[0,1]区间)。
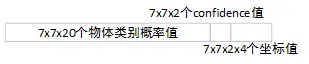
因此,YOLO网络最终的全连接层的输出维度是 S*S*(B*5 + C)。YOLO论文中,作者训练采用的输入图像分辨率是448x448,S=7,B=2;采用VOC 20类标注物体作为训练数据,C=20。因此输出向量为7*7*(20 + 2*5)=1470维。作者开源出的YOLO代码中,全连接层输出特征向量各维度对应内容如下:
注:
*由于输出层为全连接层,因此在检测时,YOLO训练模型只支持与训练图像相同的输入分辨率。
*虽然每个格子可以预测B个bounding box,但是最终只选择只选择IOU最高的bounding box作为物体检测输出,即每个格子最多只预测出一个物体。当物体占画面比例较小,如图像中包含畜群或鸟群时,每个格子包含多个物体,但却只能检测出其中一个。这是YOLO方法的一个缺陷。
2.3 Loss函数定义
YOLO使用均方和误差作为loss函数来优化模型参数,即网络输出的S*S*(B*5 + C)维向量与真实图像的对应S*S*(B*5 + C)维向量的均方和误差。如下式所示。其中,����������、iouError和classError分别代表预测数据与标定数据之间的坐标误差、IOU误差和分类误差。
����=∑�=0�2����������+��������+���������� 【1】
YOLO对上式loss的计算进行了如下修正。
[1] 位置相关误差(坐标、IOU)与分类误差对网络loss的贡献值是不同的,因此YOLO在计算loss时,使用������=5修正����������。
[2] 在计算IOU误差时,包含物体的格子与不包含物体的格子,二者的IOU误差对网络loss的贡献值是不同的。若采用相同的权值,那么不包含物体的格子的confidence值近似为0,变相放大了包含物体的格子的confidence误差在计算网络参数梯度时的影响。为解决这个问题,YOLO 使用������=0.5修正��������。(注此处的‘包含’是指存在一个物体,它的中心坐标落入到格子内)。
[3]
对于相等的误差值,大物体误差对检测的影响应小于小物体误差对检测的影响。这是因为,相同的位置偏差占大物体的比例远小于同等偏差占小物体的比例。YOLO将物体大小的信息项(w和h)进行求平方根来改进这个问题。(注:这个方法并不能完全解决这个问题)。
综上,YOLO在训练过程中Loss计算如下式所示:
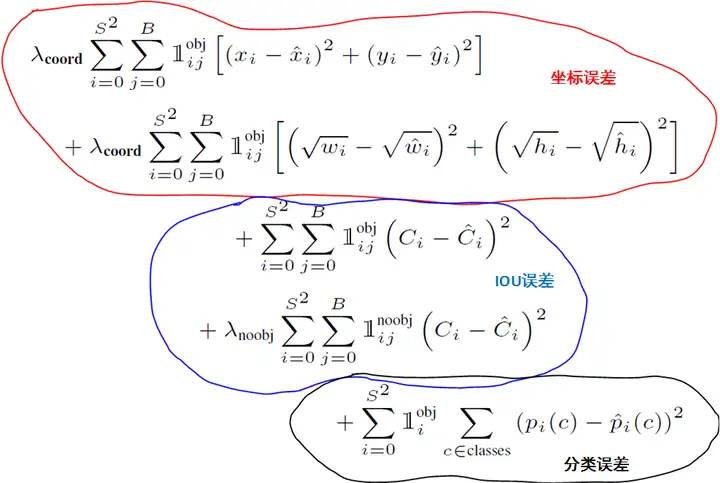
其中,�,�,�,�,�为网络预测值,�,�,�,�,�帽 为标注值。Π����表示物体落入格子i中,Π�����和Π�������分别表示物体落入与未落入格子i的第j个bounding box内。
注:
*
YOLO方法模型训练依赖于物体识别标注数据,因此,对于非常规的物体形状或比例,YOLO的检测效果并不理想。
*
YOLO采用了多个下采样层,网络学到的物体特征并不精细,因此也会影响检测效果。
* YOLO loss函数中,大物体IOU误差和小物体IOU误差对网络训练中loss贡献值接近(虽然采用求平方根方式,但没有根本解决问题)。因此,对于小物体,小的IOU误差也会对网络优化过程造成很大的影响,从而降低了物体检测的定位准确性。
2.4 训练
YOLO模型训练分为两步:
1)预训练。使用ImageNet
1000类数据训练YOLO网络的前20个卷积层+1个average池化层+1个全连接层。训练图像分辨率resize到224x224。
2)用步骤1)得到的前20个卷积层网络参数来初始化YOLO模型前20个卷积层的网络参数,然后用VOC 20类标注数据进行YOLO模型训练。为提高图像精度,在训练检测模型时,将输入图像分辨率resize到448x448。
(训练过程中的参数设置,请参考原始论文)
3. 效果
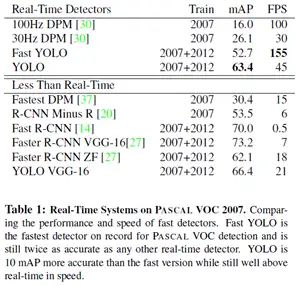
下表给出了YOLO与其他物体检测方法,在检测速度和准确性方面的比较结果(使用VOC 2007数据集)。
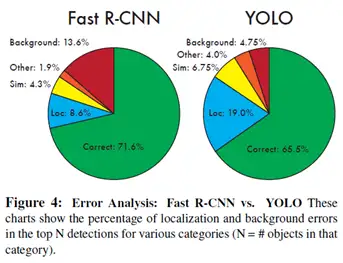
论文中,作者还给出了YOLO与Fast RCNN在各方面的识别误差比例,如下图。YOLO对背景内容的误判率(4.75%)比fast rcnn的误判率(13.6%)低很多。但是YOLO的定位准确率较差,占总误差比例的19.0%,而fast rcnn仅为8.6%。
综上,YOLO具有如下优点:
- 快。YOLO将物体检测作为回归问题进行求解,整个检测网络pipeline简单。在titan x GPU上,在保证检测准确率的前提下(63.4% mAP,VOC 2007 test set),可以达到45fps的检测速度。
- 背景误检率低。YOLO在训练和推理过程中能‘看到’整张图像的整体信息,而基于region proposal的物体检测方法(如rcnn/fast rcnn),在检测过程中,只‘看到’候选框内的局部图像信息。因此,若当图像背景(非物体)中的部分数据被包含在候选框中送入检测网络进行检测时,容易被误检测成物体。测试证明,YOLO对于背景图像的误检率低于fast rcnn误检率的一半。
- 通用性强。YOLO对于艺术类作品中的物体检测同样适用。它对非自然图像物体的检测率远远高于DPM和RCNN系列检测方法。
但相比RCNN系列物体检测方法,YOLO具有以下缺点:
- 识别物体位置精准性差。
- 召回率低。
4. 改进
为提高物体定位精准性和召回率,YOLO作者提出了YOLO9000,提高训练图像的分辨率,引入了faster rcnn中anchor box的思想,对各网络结构及各层的设计进行了改进,输出层使用卷积层替代YOLO的全连接层,联合使用coco物体检测标注数据和imagenet物体分类标注数据训练物体检测模型。相比YOLO,YOLO9000在识别种类、精度、速度、和定位准确性等方面都有大大提升。(yolo9000详解有空给出)
5. 实践
使用YOLO训练自己的物体识别模型也非常方便,只需要将配置文件中的20类,更改为自己要识别的物体种类个数即可。
训练时,建议使用YOLO提供的检测模型(使用VOC 20类标注物体训练得到)去除最后的全连接层初始化网络。
YOLO作者开源代码请见darknet, YOLO
Windows版可以参考windarknet, 支持Visual Studio编译。
Ref. Paper
- YOLO: Unified, Real-Time Object Detection
- YOLO9000: Better, Faster, Stronger
- Rich feature hierarchies for accurate object detection and semantic segmentation
- Fast R-CNN
- Towards Real-Time Object Detection with Region Proposal Networks
- darknet
文章被以下专栏收录

推荐阅读

YOLO系列简析
详解YOLO系列
来源自 我的博客前言 YOLO系列算法是一类典型的one-stage目标检测算法,其利用anchor box将分类与目标定位的回归问题结合起来,从而做到了高效、灵活和泛化性能好。其backbone网络darknet也…
对yolo系列的理解
最近看了yolo系列的文章,看完之后感觉有所收获,就记录一下,写的会比较随意些 对于yolov1有几个点我觉得有必要记录一下: (1)一开始,我并不明白yolov1,是怎么打标签的,作为一个监督…

写的很好~有个问题请教下,训练时,给定的真实值中,一个block的2个bounding box是不是设为一样的呢?如果是设为一样的话,训练出来的模型预测的两个box应该也是一样的把,学习到了这种模式。
个人最近看了yolo源码好久,苦于几个问题一直找不到答案。老师这篇文章好精彩,解决了我不少问题,还有一些请教一下老师:
第一,github上的darknet源码,我看了看,并且追踪运行流。发现cfg文件与paper中网络结构没对应上,使得yolo中程序压根没有进入到detection_layer,而且奇葩的是,所有的7*7的那个结构设计以及loss函数定义是在detection_layer中才被定义了。我怀疑我跑的是假代码;
第二,yolo9000,也就是yolo2的官方源码有吗,还是说github上最新的那个源码就是yolo2,如果那样的话,也不对,因为我也没找到joint training这个步骤,更没找到使用聚类的方法了;
第三,tensorflow上运行的yolo代码我也看了看,感觉比darknet的靠谱多了,但并不权威,老师有没有比较权威的tf+yolo源码推荐。谢谢老师!!
请问解决了吗?有时间可否分享一下
您好,请问这些问题您解决了吗,如果解决了可否分享一下呢
因此输出向量是7*7*(20+2*5)=1470维。大神笔误了吧?
边框共用一个类别预测,用置信度区分是否包含物体
YOLO使用均方和误差作为loss函数来优化模型参数——原文是sum-squared error,应该翻译成平方和误差才对吧
请问IOU误差和坐标误差有什么区别?我以为就像faster RCNN那样算softmax loss和IOU loss 就可以了
您好,请问网络那一块,第一个网络到第二个网络为什么用64个卷积核会形成192个通道数?不应该还是64嘛?
楼主,你好,在看完你的文章之后有几个问题,想请教一下。YOLO的输出如何能保证在7x7x30的输出中,可以预测出x, y, w, h和confidence,还有20个类别概率,是不是和损失函数有关系,损失函数将输出当作这些数据进行训练,最终模型就学到了预测这些数据;还有一个问题,就是坐标的问题,x和y是相对于cell的偏移量,是按照像素计算的吧,图像一般都是从左上角为坐标原点开始计算的,不知道我理解的对不对。希望楼主给予指导哈^_^
恩恩,感谢
我觉得你的理解是正确的。
因为最后的特征图其实就包含了object的信息,有物体的位置最亮(灰度值最大)而且这些像素点位置也是对应object在原图的位置(虽然分辨率差距很大,对应不可能太准确)(可以通过heatmap以及CNN可视化的研究得到这个结论)
因此可以用这些信息来回归 x,y,width,height数据,另外,confidence应该是根据featuremap对应数据的明亮程度(灰度值大小)映射得到的, class信息就是根据不同kernel的featuremap组合得到的。
以上是我的理解
请问有yolo9000的代码吗?方便发一份给我吗?724426693
YOLO 相关的代码原作者都已更新在他的网站:YOLO: Real-Time Object Detection
YOLO生成的结果包含3部分,1.B个bbox,2.每个bbox的confidence score(= P(object)
* IOU,计算confidence score会用到1中的confidence),3.20类概率。其中1中的bbox包含5维向量,分别为x,y,w,h,和confidence,分别表示中心点,宽,高和该框的IOU。所以YOLO最终生成的30维向量应该包含2份的x,y,w,h和 confidence score,再加上20维各类的概率。不知这样理解是否正确?谢谢!!
理解差不多吧,其实上面的文章写得更详细一些。