第七章:极坐标系
我们将介绍其它的用于绘制空间和位置的坐标系。这些坐标系不像笛卡尔坐标系那样「横平竖直」,所以会用到许多三角函数它们一定会勾起你的高中回忆,但它们在很多其它领域的实际问题上,能比笛卡尔坐标系表现得更好,还请重视。就来一起看看吧~
1.关于二维极坐标空间
除了笛卡尔坐标系里的\(x、y\),还有其它方法,用同样仅两个数字来定位二维平面点的位置吗?当然有办法:

可以看到,它也有一个坐标原点,以轮盘指针的方式来描述位置,通过表示半径的 \(r\) 和表示角度的 \(\theta\)来进行定位。
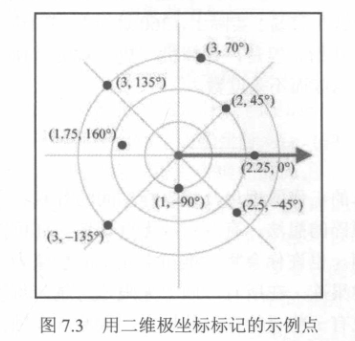
看起来不复杂,但我们在初中学习角度时就做过角度化简的题目,因此我们会想,这个角度有范围限制吗?比如上图的\((1,-90^\circ)\)可以叫\((1,270^\circ)\)吗?对于那些钝角的点像\((3,135^\circ)\),它们的 \(r\) 算正数还是负数?
答案是:是的。一个点在极坐标中可以有多个名字,我们称这种情况为别名。
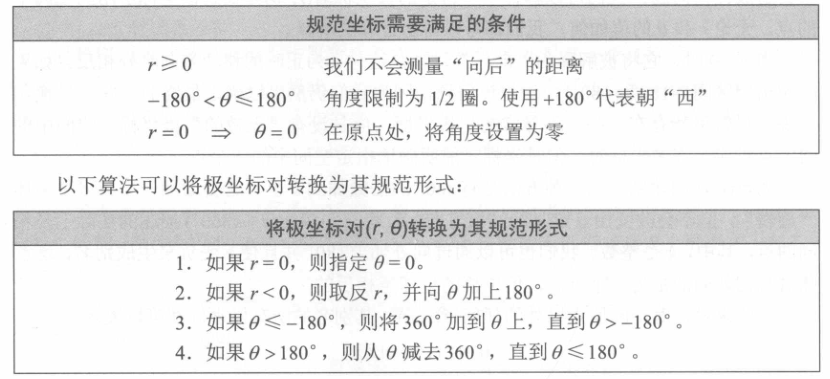
除了原点,其它的点都可以表示为\(((-1)^kr,\theta+k180^\circ)\),\(k\)是任意的整数。当然,为了避免表达过于混乱,我们还是给出了规范坐标,它的规则如下:
不错,有这规范后就好多了。现在来谈谈二维笛卡尔坐标系和极坐标之间的变换。如果你有学过通过单位圆推导出三角函数,那接下来的变换就非常简单且熟悉了。
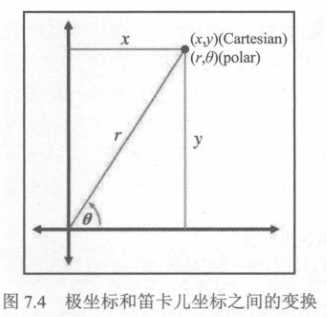
把二维笛卡尔坐标变换为极坐标:

那反过来的话:\(r=\sqrt{x^2+y^2}\),\(\theta=\arctan(\frac{y}{x})\) 即可……吗?
对于 \(r\) 的确可以,但 \(\theta\) 如果仅仅这么求的话就会出错!一来,当 \(x=0\) 时,除法部分就有问题了;二来,\(\arctan\)得到的结果范围只有\(\begin{bmatrix}-90^\circ, +90^\circ\end{bmatrix}\),不能规范表达原本的角度。
所以我们要人为对计算结果做科学的二次处理,本书作者将它写成了函数\(atan2(y,x)\)来替换:
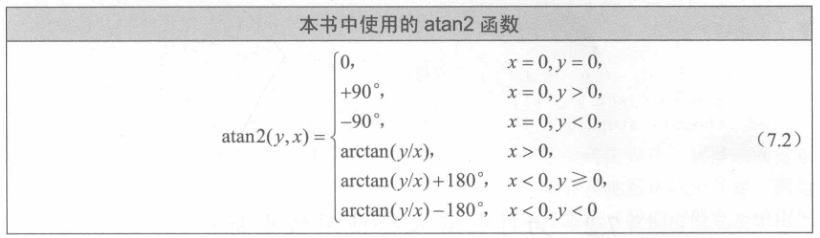
所以,最终的变换方法为:

2.为什么使用极坐标
极坐标有别名、三角函数、角度表示等问题,比笛卡尔坐标复杂多了,有什么非用不可的场合吗?
其实人类在描述位置时,往往并不使用笛卡尔坐标,比如什么“六点钟方向”、“沿东偏北45度方向走100米”……尤其是球面,我们地球的经纬网坐标就是一种三维的极坐标。
那在游戏领域呢?常见的场合是需要用到瞄准的情况,因为这通常只涉及角度,极坐标可以比笛卡尔坐标更容易使用。
3.关于三维极坐标空间
现在我们已经知道了二维极坐标算是个圆,是弯的。那三维空间中这个第三个坐标应该是直的还是弯的呢?答案是都可以。当是直的时候,整个坐标空间就是个圆柱,我们称为圆柱坐标;是弯的时候,整个坐标空间就会是个球。我们称为球面坐标。
我们先来看看比较简单的圆柱坐标:
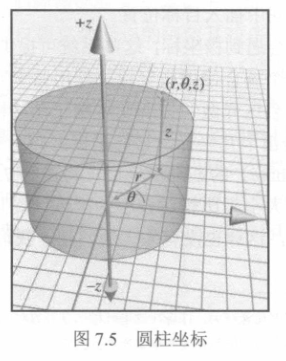
只是在原本二维极坐标的基础上加了个z,没什么好说的。至于它与三维笛卡尔坐标之间的变换,我想你也猜到了,就是在二维变换的基础上,多考虑一个z而已,z还和笛卡尔坐标中的z一样,因此可以完全不用变换它。
接下来是更常见的三维极坐标:球面坐标。
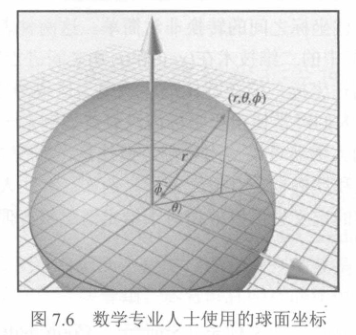
可以看出来,球面坐标在二维的基础上又多出了一个与\(z轴\)的角度 \(\phi\)。一长度两角度的表示——\((r,\theta,\phi)\),就可以定位三维空间下的点。
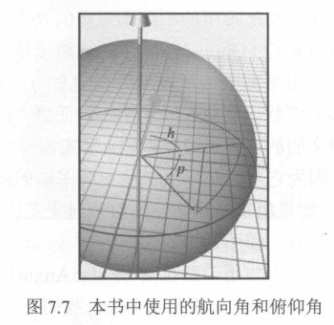
这本书中,我们用右手系统。为了更容易理解,我们把水平角度 \(\theta\) 改名为 \(h\),即航向(Heading)。垂直角度 \(\phi\)改名为\(p\),即俯仰(Pitch)。
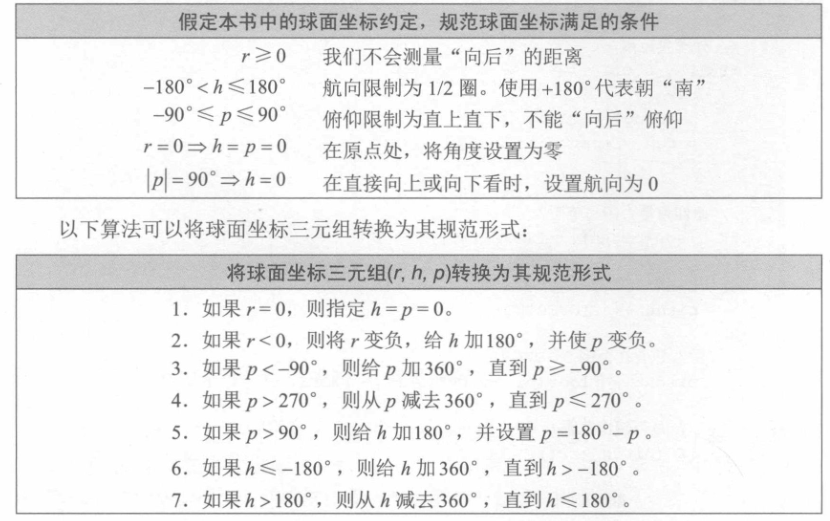
当然,球面坐标也有别名,我们也要做个规范球面坐标的规范。但这次的情况会比二维更复杂些,还会遇到一种叫「万向节死锁」的情况。这里就暂时提一嘴,就直接上结论吧:
那最后也来谈谈三维笛卡尔坐标和球面坐标的之间的变换吧。
首先,将三维极坐标换为笛卡尔坐标,同样借助直角三角形(不过,这次是两个),可以比较容易算出以下结果(这些结果只是对于右手规则情况的):

接下来是由笛卡尔坐标变换为三维极坐标:
- \(r=\sqrt{x^2+y^2+z^2}\)
- \(h=atan2(x,z)\)这个和二维一样;
- \(p=\arcsin(\frac{-y}{r})\),幸好arcsin函数的结果正好符合p标准规范。
完毕!