1.算法理论概述
光线在三维空间中的传播路径涉及到光学、几何学等多个领域,是计算机图形学和计算机视觉等领域中的重要问题之一。本文将从专业角度详细介绍模拟光线在三维空间中的传播路径,包括多次反射情况,包括实现步骤和数学公式的详细介绍。
一、概述
模拟光线在三维空间中的传播路径是指根据光线的入射方向、入射位置以及物体表面的反射和折射规律,计算出光线在三维空间中的传播路径。该问题是计算机图形学和计算机视觉等领域中的重要问题之一,主要用于光线跟踪、渲染、相机模拟等应用中。
二、实现步骤
模拟光线在三维空间中的传播路径包括以下步骤:
光线与物体相交
首先,需要计算光线与物体表面的交点。可以使用光线与物体表面的求交算法,如M?ller-Trumbore算法、Bouguet-Berthod算法等。这些算法都是基于射线与三角形相交的原理,可以计算出光线与三角形的交点。
三、数学公式
2.算法运行软件版本
MATLAB2022a
3.算法运行效果图预览


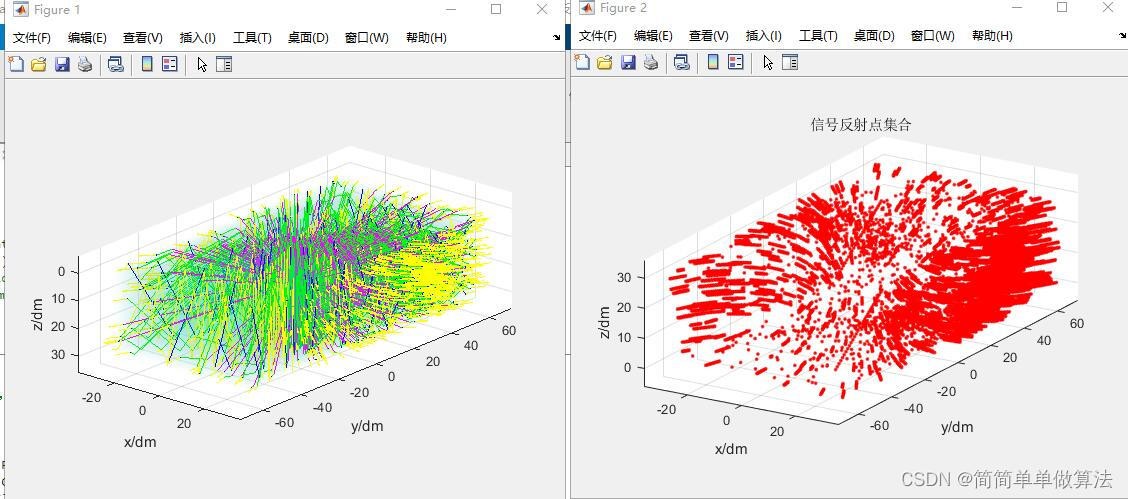
4.部分核心程序
Vv = ones(length(scalex),length(scaley),length(scalez)); %初始化仿真空间的体积
[x,y,z]=meshgrid(scaley,scalex,scalez);%生成仿真空间的网格
figure;%新建一个图形窗口
hold on
plot3(START(2),START(1),START(3),'bs');%在发射点处绘制蓝色正方形
for n = 1:N%对于每条路径
for j = 1:TT%对于每次发射
%根据路径剩余发射功率的大小设置路径的颜色
if Psave{n,j}>0.9*Pw & Psave{n,j}<=Pw;
plot3(Lsave{n,j}(:,2),Lsave{n,j}(:,1),Lsave{n,j}(:,3),'r','linewidth',1);%绘制红色路径
end
if Psave{n,j}>0.8*Pw & Psave{n,j}<=0.9*Pw;
plot3(Lsave{n,j}(:,2),Lsave{n,j}(:,1),Lsave{n,j}(:,3),'m','linewidth',1); %绘制品红色路径
end
if Psave{n,j}>0.6*Pw & Psave{n,j}<=0.8*Pw;
plot3(Lsave{n,j}(:,2),Lsave{n,j}(:,1),Lsave{n,j}(:,3),'g','linewidth',1); %绘制绿色路径
end
if Psave{n,j}>0.4*Pw & Psave{n,j}<=0.6*Pw;
plot3(Lsave{n,j}(:,2),Lsave{n,j}(:,1),Lsave{n,j}(:,3),'b','linewidth',1);%绘制蓝色路径
end
if Psave{n,j}<=0.4*Pw;
plot3(Lsave{n,j}(:,2),Lsave{n,j}(:,1),Lsave{n,j}(:,3),'y','linewidth',1);%绘制黄色路径
end
hold on%保持当前图形不变
end
end
hh=slice(x,y,z,Vv,[scalex],[scaley],[scalez]) ;%绘制仿真空间的体积
set(hh,'FaceColor',[0.9,0.9,0.9],'EdgeColor',[1,1,1],'EdgeAlpha',0.005,'FaceAlpha',0.01);%'none')
shading interp %进行颜色插值
set(gca,'zdir','reverse'); %将z轴方向反转
grid on %绘制网格
xlabel('x/dm');
ylabel('y/dm');
zlabel('z/dm');
axis equal
axis([-1.2*C,1.2*C,-1.2*R,1.2*R,-0.2*K,1.2*K]);%设置坐标轴的范围
view([40,20]);%设置视角