tag: AI
category: 系统论文
又要读论文啦!!
目的:联合利用多个GPU来训练图神经网络。
方式:用一种特殊的数据布局来利用GPU之间的NVLink连接, 并且GPU(显存)中存放了图形拓扑和popular node features。
措施:
- 引入集体采样源语:collective sampling primitive
- 设计了基于消费者生产者的管道:允许不同小批量任务并行。
先抨击了已有的系统:Quiver和DGL-UVA
系统Quiver与DGL-UVA :将图形拓扑存放在内存中,而节点特征存放在GPU的显存中,每个GPU独立进行图采样,并使用UVA(统一虚拟寻址)通过PCle(一种高速串行计算机扩展总线标准,支持显卡)访问图拓扑,但有两个问题:
- 高沟通成本:
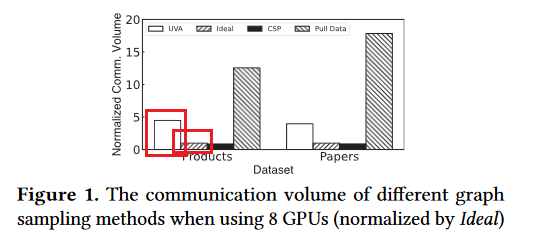
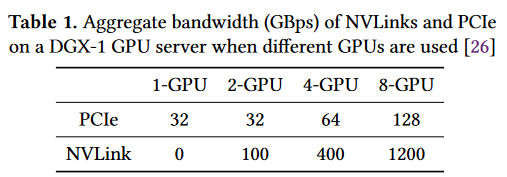
图1和表1说明:
- UVA等系统读入了太多无用的数据量
- 采用的PCIe接口远远慢于NVLink,但UVA与Quiver对NVLink的支持并不好,UVA采样是在PCIe上的
- GPU利用率低
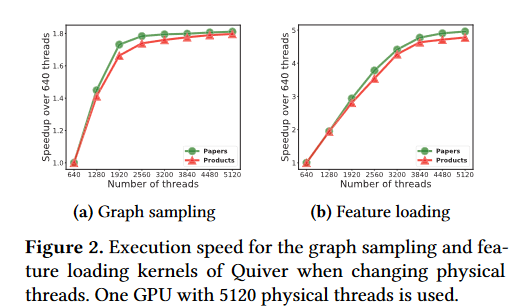
图为“更改物理线程时候Quiver的图形采样和功能加载的执行速度”,且这个GPU最多开5120个线程。
图中可以发现,均存在某个点,在那个点之后,就算再开线程,但速度就不变了基本。因此无法充分利用GPU。
提出自己的模型
DSP:
-
将图结构划分为不同的图块,这些图块都是联通(well-connected)的,并把每个图块放在一个GPU中,这样图形采样就能通过NVLink,而不是用PCIe了,而且由于不用PCIe了,所以读取的数据量就变少了。
为什么呢?因为看前面,前两个系统把图结构存放在内存中,而NVLink是适用于GPU之间通信的,因此采样需要通过PCIe,但如果把图信息放到GPU中,那采样就是读取GPU,就可以通过NVLink了。
每个GPU的剩余显存,则用来存放不同的节电功能,之后,所有的GPU形成一个通过NVLink的大型聚合缓存,来减少节点通过PCIe对CPU内存的访问。
-
定义了采样器,装载器和训练器:
- 采样器:就是采样——集体采样源语:CSP
- 装载器:加载图样本的节点特征
- 训练器:用来训练
-
CSP(集体采样源语:将每个图节点上的采样任务推送到其驻留的GPU上,而不是拉出其邻接列表(图1)大幅度减少通信数据量:因为通常只对节点邻居节点进行采样。
-
利用生产者消费者管道,来重叠"使用GPU"的任务
基于采样的GNN训练
基于文中的假设,太长了不写了,直接复制,狠狠地复制!
不基于采样的GNN训练

然后我们知道GNN的聚合公式:

不知道?不知道滚回去看文章中的解释。
有个关键点就是:
用第一层训练节点\(v\) 的时候,要聚合\(v\)的邻居节点的信息,同时其邻居节点也聚合了他们自己邻居节点的信息,因此当在第二层训练节点\(v\)时,表面上节点\(v\)是再次聚合了它邻居节点的信息,实则同时聚合了邻居节点以及邻居节点的邻居节点的信息。故,GNN有k层,训练一个节点\(v\)就需要聚合其k-邻居节点的信息,并且貌似重复聚合了很多次。所以在稠密图中复杂度贼高。
基于采样的GNN训练
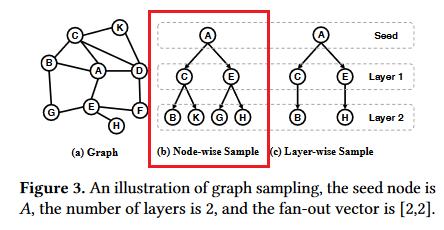
训练是在小批量中进行的,并且在每个小批量中,使用某些节点(称为批量的种子节点)而不是图中的所有节点的输出嵌入来计算梯度。此外,在计算种子节点$ v \(的输出嵌入时,不是使用\) v $的所有 K 跳邻居,而是从 v 的 K 跳邻居中采样子图(称为图样本)以降低复杂性。(不用全部的邻居了,而是只挑一部分)
例子:

此处有个“fan-out”向量。[2,2]:
对于节点采样:每层,每个节点选择两个邻居。
对于分层采样,扇出向量指明了该层中的所有种子节点采用的邻居总数。
节点特征
节点向量通常具有高纬度,并且可能GPU显存没法存下整个图,因此需要存到内存中,这就需要用PCIe了,但作者观察到:在训练GNN的时候,某些节点的访问频率比其他节点高很多,因此把这些节点存放在GPU的显存中,这样之后进行特征采样时候,就能用NVLink了。
DSP架构
数据布局

每个GPU都存了一个图划分,包含一些节点和邻接表。(METIS方法)
怎么划分?用到了一种能够最小化不同划分之间边缘交叉边数量的划分方式,来尽量减少跨GPU的通信。
对于每个图划分中的热门节点,尽可能多地存在GPU中,其余节点就放在CPU中。
为什么能把图拓扑存在显存中呢?因为即使对于特大型的图,如超过10亿条边的图,也只需要大约8G的显存,况且还可以只存热节点。
除此之外,该模型还采用了分区特征缓存,也就是把相似的节点,就算不在同一个子图中,也存在有空位的多余的GPU的显存中,之后提取图特征的时候,还是只用访问显存以及GPU之间的通信,而不用通过内存。
训练过程
如图4,每个GPU中有3个东西:
Sampler采样器
每个GPU上的采样器通过与其他GPU上的采样器合作,来构造出图样本,并且当采样器需要访问其他GPU上的图拓扑时,不是直接把整个图拉过来,而是通过另外的采样器实现。
采样器构造如图b:
Loader装载器
就是获取采样器采集到的描述图样本的节点的特征向量,热门节点直接在显存中获得,冷门节点则在内存中获得,两者并行,因为一个用NVLink,一个用PCIe
trainer训练器
每个训练器都有模型参数的副本,就是用loader给过来的特征向量进行训练,分别计算最终的输出以及梯度,然后部署在不同GPU上的trainer,用collective allerduce聚合梯度。
同一批量的三个er,顺序执行
对于不同批量,作者设计了前文提到“生产者消费者管道”来并行利用GPU资源。
注意
当只有一个GPU时候,Sampler和Loader就变成本地服务了,不再需要从其他GPU上采集交换信息。
DSP可在多机多GPU上运行,此时DSP会将图的拓扑结构和热节点复制到每个机器中,然后不同的机器存储不同的冷节点,机器之间仅需要传送关于冷节点的知识,同一个机器内部将图进程划分,存在不同的GPU上
CSP:集体采样原语
主要用于GPU之间的通信。
工作流程
CSP可用Node-wise和layer-wise,但我们假设CSP采用Node-wise的方法逐层采样:以图3(b)为例
在具体采样过程中,对于每一层,CSP由所有GPU上的采样器共同来执行完采样工作,且采样工作分三个阶段完成:shuffle,sample,reshuffle。
例图:

有2个GPU,4个seed node(作为训练样本的节点)
-
在shuffle阶段:利用GPU之间的通信,将每个seed node交给存有其临街列表的GPU,如\(E\)与\(B\)换位置了(数据推送)
-
在sample阶段:每个GPU在本地存放的邻接表中找出自己有的seed node的所有邻居节点,并进行采样(挑出来几个,如\(A\)挑选出了\(C\)与\(E\))
-
在reshuffle阶段:把shuffle阶段换走的seed node换回来,同时连带着其在sample阶段采样的节点一起回来。
采样的每个阶段,都设置了同步操作来保证各个GPU的进度一致。
CSP长什么样子
参数
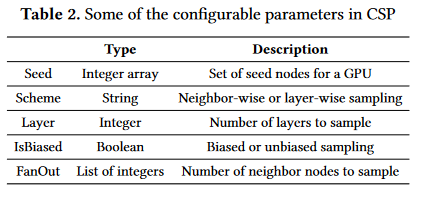
采样方式:
- 有偏采样:按照每个节点权重占比作为其被选择的概率,权重放到边上。
- 无偏采样:大家概率一样
我们发现,由于在\(shuffle\)阶段,每个seed node都被换到了存有其邻接表的GPU中,因此无论有偏采样还是无偏采样均可以通过只访问GPU实现。
\(frontier~node\): 其邻居将被采样的节点。
由于DSP与CSP支持两种主流的图采样:node-wise和layer-wise,因此,以下分别介绍这两种:
在\(node-wise\)中,fan-out向量直接指出了每层中每个\(frontier~node\)采样的邻居节点的数量;
在\(layer-wise\)中,fan-out向量只能确定每层中所有\(frontier~node\)总共采样的邻居节点的数量,具体确定每个\(frontier~node\)采样的邻居数量的方式,也是按照其邻居的总权重占所有\(frontier~node\) 的邻居的总权重的占比确定的。
消费者生产者管道
同一小批量数据在GPU中必须要依次走过采样器,装载器和训练器,必须同步执行。但不同的小批量数据无所谓,同时,由于同步问题,且有些数据利于计算,有些不利于,但每个阶段所有GPU必须同步执行,因此就会造成GPU的闲置,于是就设计了这种管道重叠执行不同的小批量任务。
如图:
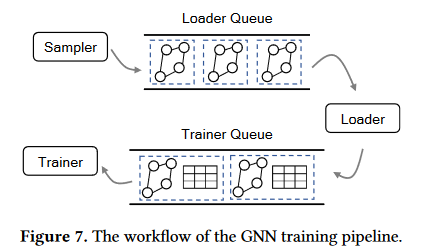
在这里再理一下DSP模型:每个GPU内部,用三个东西:Sampler,Loader和Trainer,这三个东西在行动时候,需要占用特定的SM,但这些SM可能会重叠。对于同一个小批量任务,必须按照Sampler,Loader以及Trainer的顺序执行,但是可以在GPU1上的Sampler执行,然后到GPU2上执行Loader,最后在GPU3上执行Trainer。但每个GPU执行Sampler Loader以及Trainer时候,都会需要其他某些GPU参与,且要求也调用与之相同的东西。
其结构是这样的:,然后,每个GPU只存部分图节点和其邻接表。但每个GPU
不定地被分到哪一个小批量数据的训练任务。当其被分到一个小批量任务时候,他拿到seed nodes,作为此时的frontier node,进入Sampler进行采
样。采样过程细化为这个图:, 采样时候由CSP原语控制,由于某个GPU的
任务可能会涉及到一些他没存储的节点(如GPU1中的E节点),那么他需要借助其他GPU的采用器,同时调用GPU们的通信内核,shuffle这些seed node。采样的每个小阶段,都需要不同GPU之间的配合,主要调用GPU的通信内核,但负荷很轻(只需要少部分的内核参与即可),且只需要少量的带宽就可以完成通信,多余的带宽可以让其他通信内核使用。采样完毕后,该GPU的才能执行loader和trainer,因此采样时候该GPU的部分计算内核就被空闲了,所以它在采样时候可以同时运行多个计算任务。这时候,这些其他的loader和trainer任务从哪里来,就用到了管道。loader和trainer过程也需要用到通信内核与其他GPU进行交互。
这里可以看出管道的一个用处,就是把同一个批量的训练任务的三个阶段:Sampler,loader,trainer分开了,尽管是同步执行的,但不再是必须在同一个GPU上执行
结果:
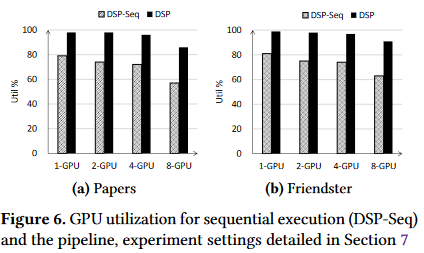
DSP-Seq为顺序执行,没有管道,DSP为有管道,纵轴为GPU的利用率。
处理死锁问题
死锁产生的原因:
- GPU内核的分配直到任务结束是不可撤销的,也就是不可剥夺的,非抢占式调度
- 且通信必须在所有参与通信的GPU的通信内核启动时候才会进行,否则就等待。
例子:
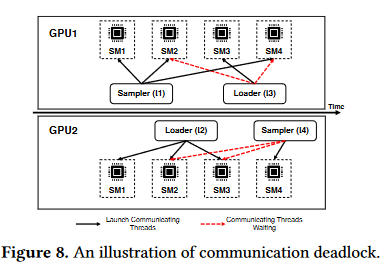
SM为流处理多处理器,里面通常包含多个CUDA核心,每个GPU内有多个SM,每个内核需要调用多个SM来完成任务。
在这里,负责Sampler通信的通信内核需要多个SM,假设GPU1的需要SM1,SM2,SM4,其余GPU的Sampler和Loader同理。
然后GPU1想完成Sampler任务,需要GPU2 的Sampler参与,但GPU2的Sampler需要SM2与SM3,但被GPU2的Loader占用了,但Loader没法释放资源,因为任务没完成,它想完成任务需要等待GPU1的Loader与之通信。
解决办法
采用集中式通信协调方案:即,专门用一个GPU,作为leader,来规定其他所有GPU的通信内核的启动顺序。
具体操作:
为每个工作实例,比方说,对于每个小批量训练任务,我们都会安排执行该任务的worker(Sampler,Loader,Trainer),然后为每个worker分配固定的id,无论他们在哪个GPU上。
对于每个GPU,当工作的线程准备好进行通信时,会将其对应的id放到待处理集合中,然后Leader使用队列来管理这个集合,并且按照提交顺序启动通信内核。一旦启动某个worker的通信内核,就会把他的id广播到所有的GPU中,然后需要配合的GPU就会开始配合它进行通信,
实验
训练过程:

左图,表明,DSP的准确度在随着小批量的增多时,与已有系统是一致的,这说明DSP的训练有效性。
右图则表明DSP能在更短的时间内训练完成。
用GNN进行测试:
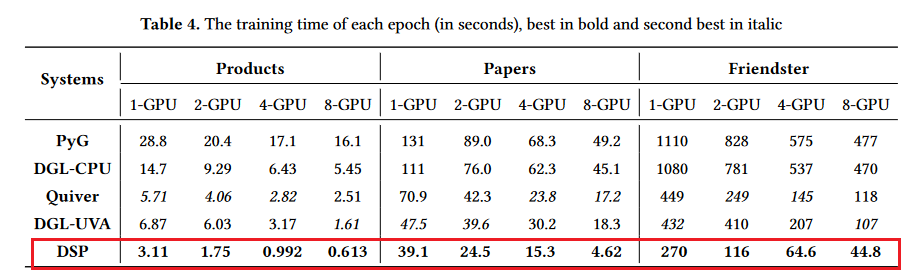
这个图说明每轮的训练时间,DSP均是最优的。
用GCN(图卷积)进行测试

发现也是极优的。
然后作者进行了进一步测试:
说明图拓扑结构存入GPU显存的优越性
为了说明DSP将图拓扑结构也存入GPU是优于只讲图的节点特征存入GPU的Quiver:
限制每个GPU的显存的大小由24GB改为6GB,同样用8个GPU,来训练两个较大的图:\(Papers\)和\(Friendster\)
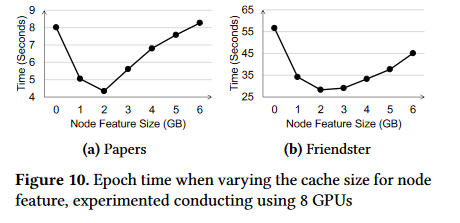
图中是DSP的结果,发现当分配给用于存储节点特征显存为2GB时候,效果最明显,因为此时用于存放图拓扑的内存总容量为4*8=32G,大于图拓扑大小:

同时,由于进行采样时候,主要用部分热门节点的节点特征,因此增加对节点特征的存储会使得收益变低,而增加图的拓扑结构则会是收益变高,因为采样时候就可以尽量通过NVLink而不是PCIe进行操作了,因此,曲线先下后上。
由此说明,将图拓扑结构存入GPU是收益很大的一件事情。
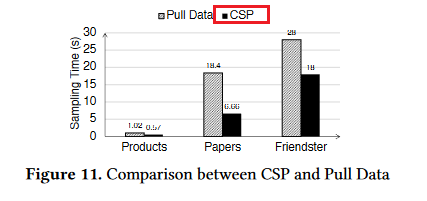
说明图采样过程CSP的优越性:

结果表明,仅就图采样过程,DSP也是极其优秀的,最多可快20倍,并且提升还优于线性。
主要原因是,DSP将图拓扑结构尽量存在显存中,采样过程通过NVLink而不是PCIe
说明DSP通过“push data”的方式进行采样是优越的
前文说到,DSP在采样中一般采用push data的方式,就是对于采样任务,把不存有该点的GPU的采样任务,推送给存有该点邻接表的GPU上进行采样,采样完再送回来。对于pull data的方式,是将没有的邻接表拉入执行任务的GPU,然后进行采样,这样会导致一个显著的问题,就是拉来了很多不必要的数据。
然后说明如果在采样时DSP采用layer-wise的采样方式,也是优越的
当前的其他系统均不支持在GPU上进行layer-wise采样,因此作者比较了在CPU上的FastGCN系统:

可以发现,提升巨大。
然后说明DSP采用training pipelin的方式是优越的
下图说明和DSP-seq的比较:

可以发现均优于DSP-seq