本论文全名为Anomaly Transformer: Time Series Anomaly Detection with Association Descrepancy(通过关联差异进行时序异常检测),主要提出了一种无监督的异常点检测算法,并在6个benchmarks上测试,获取良好结果。
论文链接:ANOMALY TRANSFORMER: TIME SERIES ANOMALY DETECTION WITH ASSOCIATION DISCREPANCY
论文主要想法
作者这里定义了两个概念:prior-association与series-association,用于捕捉时间序列数据中的异常模式和正常模式。
- 将Transformers应用于时间序列,通过Transformer模型的自注意力(self-attention map),获取每个时间点的时许关联,即于整个时间序列的关联权重分布。这个关联分布可以为整个时序上下文提供丰富的描述,展示动态模式,例如周期或趋势,此关联分布被定义为序列关联(series association);
- 作者还观察到,由于异常点和正常点相比十分稀少,异常点的比较难与整个序列建立关联,但由于连续性,异常点更有可能与其相邻的时间点建立强关联。这种 adjacent-concentration inductive bias (临近集中传导偏差)被称为先验关联(prior-association)。
基于以上观察和概念,作者发现:时序中的异常位置的关联应集中在相邻的时间点上,这些时间点由于连续性而更可能包含类似的异常模式。相比之下,占主导地位的正常时间点可以发现与整个系列的信息关联,而不限于相邻区域。
这样产生了新的概念:关联差异(Association Discrepancy),这指的是每个时间点的prior-association与series-association距离的量化。作者希望通过利用“异常点的关联更加相邻集中”这一点,判断出比较小的关联差异,进行无监督异常点识别。
如何计算:
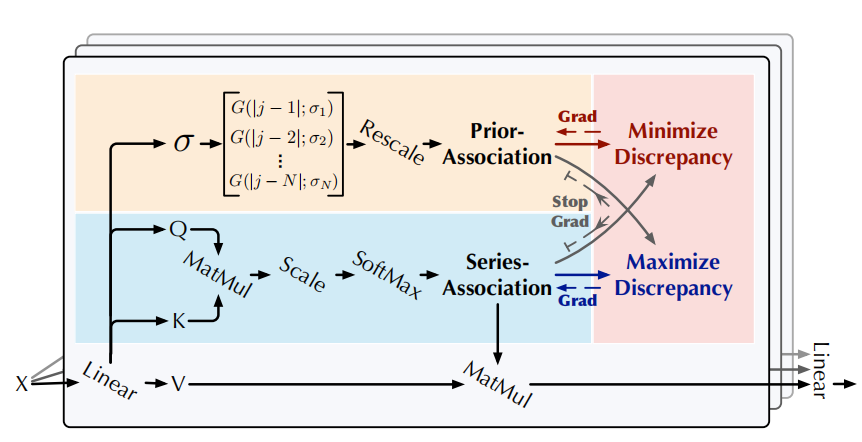
- 作者将Transformer中的self-attention机制更新为Anomaly-Attention机制,命名为Anomaly transformer,并采用一个双分支的结构来对先验关联、序列关联进行建模。
- Prior-association:通过可学习的高斯核(learnable Gaussian kernel)来计算;
- Series-association来自于原本序列中的自关联权重(self-attention weight)。
此外,采用minimax机制来作用于双分支结构,来放大Association Discrepancy的可区分性,并进一步推导出新的基于关联的准则。
相关领域其他工作:
- 无监督时间序列异常检测
- 密度估计方法:计算了局部密度和局部连接性来判断是否是outlier(LOF,COF)或者说使用高斯混合模型来预测密度(DAGMM,MPPCACD);
- 聚类方法:通过点到聚类中心的距离来计算anomaly score;
- 重构方法:计算reconstruction error,例如LSTM-VAE模型和GAN模型;
- 自回归方法:计算prediction error,例如延展了ARIMA模型的VAR模型(通过 lag-dependent covariance预测未来数据),或者LSTM。
- 在时间序列分析中transformers的运用
- 由于self-attention 机制,transformers在时间序列分析中有广泛运用,比如用于发现可靠的长期时间依赖性。
- 在时序异常检测中,GTA(Graph Transformer Autoencoder)模型利用Transformers来学习多个物联网传感器之间的关系、并提供了为时序异常检测提供了重构基准。
算法解读
模型结构
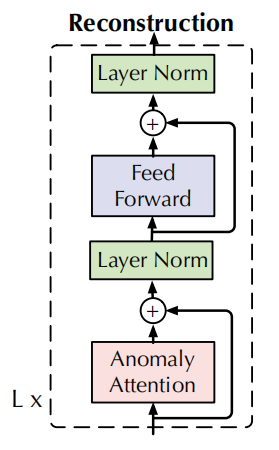
假设我们有L层,一层模型结构为:
计算步骤为:
- 什么是Layer Normalization?为什么在transformers中要用这个?
https://www.zhihu.com/question/487766088
以下公式被总结为Anomaly-Attention(·):
算法图参考:
通过KL-Divergence来计算Association Discrepancy:
- 这里我们使用先序关联、序列关联的对称KL散度来代表这两个分布之间的information gain(信息增益)
- AssDis(P,S;X)为一个N*1的数组,每一行代表了每个时间点的association discrepancy,对应了输入点的数据X_i
- 之前的观察可以得出,异常点比起正常点会有较小的AssDis值。
模型优化:minimax
对于非监督学习一般使用重构损失(Reconstruction loss)来进行优化,重建损失将引导序列关联找到最有信息量的关联。
loss函数:
为了增强与普通时间点的区别,作者还增加了一项来使关联差异更大,由于prior-association的单峰性,discrepancy loss会引导series-association更加关注不相邻的区域,使得异常的重构更加困难,异常的可识别性更强。
- \(\|\cdot\|_{\mathrm{F}}^2\) 为Frobenius-norm(F-范数)
- 在这里,loss function采用F-范数的主要原因可能是为了衡量重构误差的大小。
Minimax 策略:由于直接最大化关联差异会导致高斯核的scale参数急速减小,先序序列会变得无意义,因此作者提出了minimax策略:
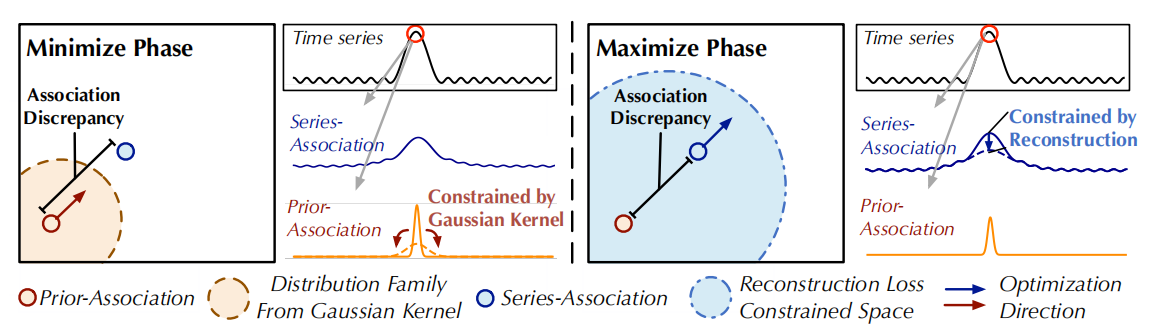
- 在最小化阶段,用先序序列将关联差异在高斯核分布中最小化;最大化阶段,获取在重构损失中的最优关联序列,来获取最大化的关联差异。
- 这样的流程迫使关联序列更关注不相邻的水平。
公式
- detach指的是停止关联的梯度反向传播。由于P在最小化阶段逼近\(S_{\text{detach}}\),最大化阶段将对series-association产生更强的约束,迫使时间点更多地关注非相邻区域。在重建损失下,异常比正常时间点更难实现,从而放大了关联差异的正常-异常可区分性。
基于关联的异常评判标准
在重构标准中,我们添加了正则化的关联差异,将同时利用时间表示和可区分的关联差异。最后得出的评判标准(异常分数)如下:
第一部分为正则化的关联差异,第二部分为重构错误。\(\odot\) 为元素乘法
AssDis越小,异常分数越大;reconstruction error越大,异常分数越大。为了更好地重建,异常值通常会降低重构差异,导致越高的异常分数。因此这样的设计可以让重构错误核关联差异协同提高检测性能。
代码复现
1. 装环境
安装pytorch
只能在python3.6上跑,需要安装对应的pytorch(要求:Python 3.6, PyTorch >= 1.4.0)
参考 https://blog.csdn.net/yup1212/article/details/124277058 发现可能只能在1.5版本上运行,刚好满足要求
官网下载v1.5版本的指南: https://pytorch.org/get-started/previous-versions/#v151 ,可以根据自己gpu/电脑系统版本选择
我是linux,cuda版本12.2,这里选择了
conda install pytorch==1.5.1 torchvision==0.6.1 cudatoolkit=10.2 -c pytorch
但后来发现还是报错,
在 torch.autograd.backward(self, gradient, retain_graph, create_graph)
处报错:RuntimeError: no valid convolution algorithms available in CuDNN (getValidAlgorithms at /opt/conda/conda-bld/pytorch_1591914838379/work/aten/src/ATen/native/cudnn/Conv.cpp:430)
意思是无法在CuDNN中找到可用的卷积算法,看下来还是pytorch版本的问题。参考 https://blog.csdn.net/hymn1993/article/details/125558623 发现可以安装python3.7,于是重新安装。参考这篇文章的作者的选择,我安装了pytorch 1.12.1,这里选择了cuda11.3的版本:
conda install pytorch==1.12.1 torchvision==0.13.1 torchaudio==0.12.1 cudatoolkit=11.3 -c pytorch
由于我cuda版本为12.2,不能选择太低版本的比如CUDA 10.2的安装指令,会报错:
NVIDIA A100-PCIE-40GB with CUDA capability sm_80 is not compatible with the current PyTorch installation.
The current PyTorch install supports CUDA capabilities sm_37 sm_50 sm_60 sm_61 sm_70 sm_75 compute_37.
If you want to use the NVIDIA A100-PCIE-40GB GPU with PyTorch, please check the instructions at https://pytorch.org/get-started/locally/
安装其他依赖
pip install pandas scikit-learn
2. 下载数据集
根据作者在README中给到的链接,可以通过google drive获取数据集: https://drive.google.com/drive/folders/1gisthCoE-RrKJ0j3KPV7xiibhHWT9qRm?usp=sharing
3. 进行训练和测试
SMAP
这里我先选择SMAP数据集进行测试。运行 bash ./scripts/SMAP.sh 后获得测试结果:
Accuracy : 0.9906, Precision : 0.9370, Recall : 0.9935, F-score : 0.9644
SML
运行 bash ./scripts/SML.sh 后获得测试结果:
Accuracy : 0.9871, Precision : 0.9183, Recall : 0.9629, F-score : 0.9401
SMD
运行 bash ./scripts/SMD.sh 后获得测试结果:
Accuracy : 0.9916, Precision : 0.8850, Recall : 0.9161, F-score : 0.9003
PSM
运行 bash ./scripts/PSM.sh 后获得测试结果:
Accuracy : 0.9873, Precision : 0.9730, Recall : 0.9816, F-score : 0.9773
代码解读可以参考 https://blog.csdn.net/smileyan9/article/details/128439360
代码复现(讨论更多数据集)可以参考 https://cloud.tencent.com/developer/article/2373880
附录Appendix
KL 散度(Kullback-Leibler Divergence)
D_{KL}(P||Q): KL散度通常用于量化概率分布P与概率分布Q的不同。从采样角度,KL散度描述了我们用分布Q来估计数据的真实分布P的编码损失。
- 假设对某随机变量存在两个概率分布P,Q。如果该随机变量为离散,则KL散度定义为:
(如果是连续则求和符号变积分符号,范围取-inf~inf)
\(D_{KL}(P\\|Q)=0\) 当且仅当\(P=Q\)
- 关于KL散度的笔记,链接
Transformers模型
Transformers模型是一类在自然语言处理(NLP)领域广泛使用的深度学习模型。它们以注意力机制(Attention Mechanism)为核心,允许模型在处理输入数据(如文本)时动态地聚焦于信息的不同部分。
Transformers算法原理:
自注意力(Self-Attention)机制:
查询(Query)、键(Key)、值(Value):自注意力机制通过将输入序列的每个元素转换为查询(Q)、键(K)和值(V)来工作。每个元素对于所有元素(包括自身)生成一个权重,权重决定了在生成输出时应该给予每个元素多少注意力。
注意力权重:注意力权重计算涉及Q和K的点积,然后通常使用softmax函数进行缩放,以确保权重的总和为1。
多头注意力(Multi-Head Attention):
Transformers模型通常不只计算一组Q、K、V,而是将输入分割成多个头,每个头独立地计算一组Q、K、V,从不同的角度捕捉信息,然后将所有头的输出拼接起来,通过一个线性层得到最终的输出。这样可以让模型同时关注来自不同位置的不同信息。
位置编码(Positional Encoding):
由于Self-Attention机制本身不包含序列的顺序信息,Transformers引入位置编码来加入序列中每个元素的位置信息。位置编码与输入元素的编码相加,这样模型就能知道序列中元素的顺序。
标准的Encoder-Decoder结构:
Encoder:编码器部分由多个相同的层组成,每层都有多头注意力和前馈神经网络(通常是全连接层)。它逐层处理输入数据,将信息向上传递。
Decoder:解码器也由多个相同的层组成,除了处理前一个解码器层的输出,每一层还需要处理编码器的输出。解码器在自注意力层使用了所谓的masked attention,确保位置i的输出只依赖于小于i的位置,保证了解码的自回归特性。
前馈神经网络(Feed-Forward Networks):
在每个Encoder和Decoder层中,除了注意力机制外,还有一个前馈神经网络,它对每个位置应用相同的全连接层,但是独立于序列中的其他位置。这允许模型进一步整合每个位置的信息。
更多可以参考Transformer模型详解(图解最完整版)
Reconstruction loss
Reconstruction loss是机器学习中一种常见的损失函数,特别是在无监督学习和生成模型(如自编码器和生成对抗网络)中使用。它衡量的是模型重构输入数据的能力,即模型生成的输出与原始输入数据之间的差异。在不同的上下文中,重构损失可以有不同的形式和名称,但其核心目的相同:使得重构的输出尽可能接近原始输入。
在解释重构损失之前,需要了解自编码器的基本结构,它是一个典型使用重构损失的模型。自编码器通常由两部分组成:编码器和解码器。编码器的任务是将输入数据压缩成一个低维表示(称为编码),而解码器的任务是从这个低维表示重构出原始数据。
重构损失的含义:
衡量差异:重构损失计算的是重构数据(解码器的输出)与原始输入数据之间的差异。这个差异可以通过不同的方法来衡量,例如均方误差(Mean Squared Error, MSE)、交叉熵损失等。
优化目标:在训练过程中,通过最小化重构损失,模型学习到的编码会尽可能包含重建原始数据所需的全部信息,使得解码器可以更准确地重建输入数据。
应用领域:虽然重构损失在自编码器中最为常见,但它也广泛应用于其他生成模型,如变分自编码器(VAEs)和部分生成对抗网络(GANs),在这些模型中,重构损失帮助模型学习生成与真实数据分布尽可能相似的数据。
常见的重构损失类型:
均方误差(MSE):衡量的是重构值与真实值之间差的平方的平均值,常用于回归问题和连续数据的重构。
交叉熵损失:在处理分类问题或模型输出是概率分布时常用,它衡量的是两个概率分布之间的差异。
重构损失在模型的训练过程中起到至关重要的作用,它直接影响模型的重构质量和学习到的特征的有效性。通过最小化重构损失,可以使得模型在各种任务,如降维、去噪、生成模型等方面表现得更好。
Reference
- 腾讯云论坛:ICLR 2022 | 通过关联差异进行时序异常检测
- 阅读小助手:chatpdf