作者认为单目3D目标检测可以简化为深度估计问题,深度估计不准确限制了检测的性能.已有的算法直接使用孤立实例或者像素估计深度,没有考虑目标之间的集合关系,因此提出了构建预测的目标之间的几何关系图,来促进深度预测.
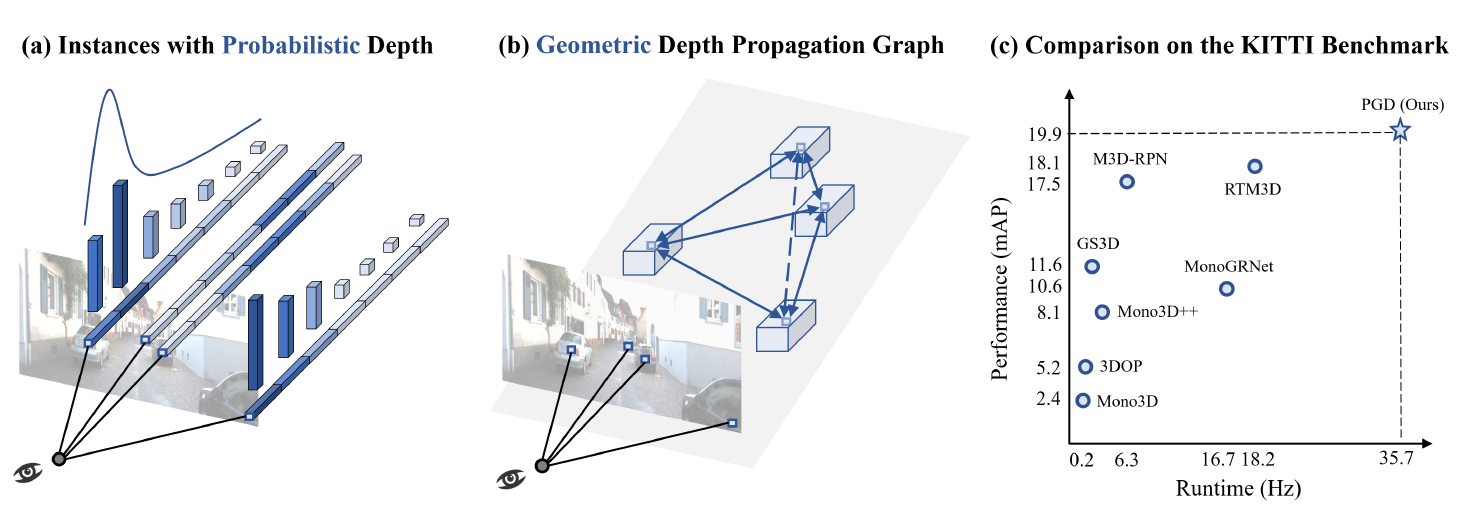
将深度值划分成若干个区间,然后通过分布的期望来计算深度值,在精度和速度上都取得了不错的性能.PGD在FCOS3D的基础上实现,如下图所示.
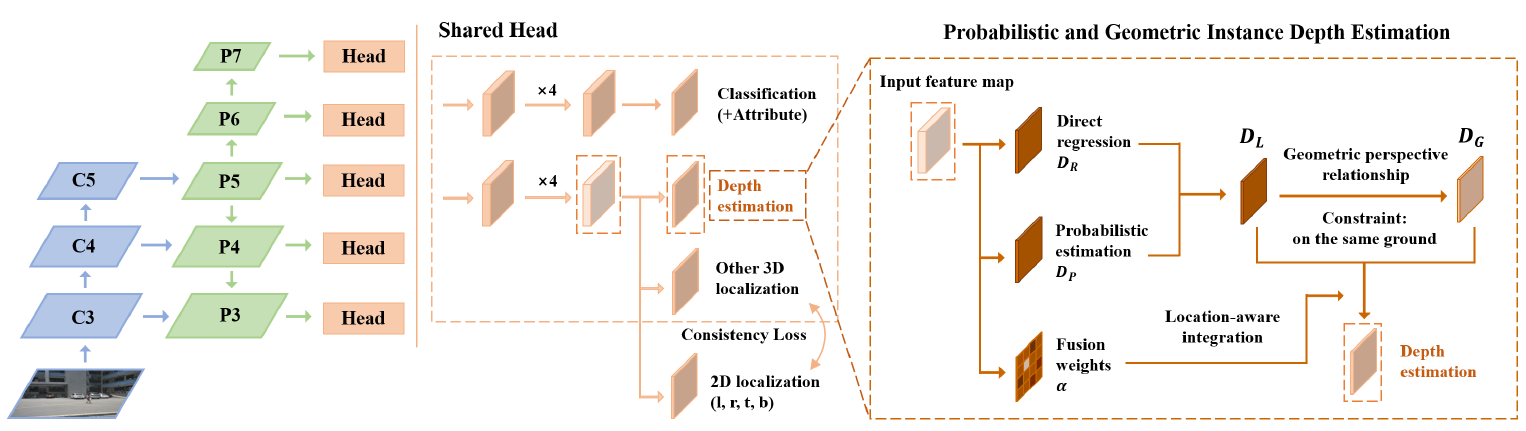
深度预测模块比较复杂,首先是直接深度回归DR.然后,将深度离散化,假设检测范围为0~Dmax,离散单位为U,那么可以得到的分割点数量为C=|_Dmax/U_|.将这组分割点记为向量ω,那么可以引入一个并行于直接回归head的模块,来生成概率图DPM,用下面的式子解码:
![]()
DP就是概率深度(Probabilistic Depth).取Top-2置信度的均值作为深度置信度得分深度置信度得分(Depth Confidence Score).在推理时,深度置信度得分与中心度得分、分类得分相乘,作为最终的排序指标使用.使用下面的式子将DR和DP融合:
![]()
σ(⋅)是 sigmoid 函数,λ是一个与数据无关的学习参数.DL是每个孤立的实例的局部深度估计(Local Depth Estimation).
- Probabilistic Perspective Geometric Detecting Objectsprobabilistic perspective geometric detecting detecting interaction detecting encrypted malicious perspective detecting provider allowed代码 biomarkers detecting external systemic geometric probabilistic perspective computation projection and representation perspective federated provable