Games101 HomeWork2
导航
作业要求
- rasterize_triangle(): 执行三角形栅格化算法
- static bool insideTriangle(): 测试点是否在三角形内。你可以修改此函数的定义,这意味着,你可以按照自己的方式更新返回类型或函数参数。
先从简单的函数开始
insideTriangle
insideTriangle只需要检查点是否在三角形内部,我并没有修改函数的定义,是否在三角形中,返回一个bool 类型的值似乎挺正常的。
判断一个点是否在三角形中其实是挺简单的,这里用了课程中用到的差乘法:
static bool insideTriangle(float x, float y, const Vector3f* _v)
{
// TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]
Vector3f P=Vector3f(x,y,_v[0].z());
//三边向量
Vector3f AC=_v[2]-_v[0];
Vector3f CB=_v[1]-_v[2];
Vector3f BA=_v[0]-_v[1];
//顶点与目标点向量
Vector3f AP=P-_v[0];
Vector3f BP=P-_v[1];
Vector3f CP=P-_v[2];
//if cross product in the same direction ,its inside the triangle
if(AP.cross(AC).dot(BP.cross(BA))>0.0f&&
BP.cross(BA).dot(CP.cross(CB))>0.0f&&
CP.cross(CB).dot(AP.cross(AC))>0.0f)
{
return true;
}
return false;
}
然后是光栅化的实现了
rasterize_triangle
首先我们要找到三角形的一个包围盒(Bunding Box)然后遍历包围盒中的点,如果点在三角形内部,使用重心公式插值得到z值(这部分框架中已经给出实现),并且深度小于z-Buffer中的缓存,那么我们给这个像素的颜色重置为三角形的颜色。
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4();
//包围盒的建立
std::vector<float> arr_x{t.v[0].x(),t.v[1].x(),t.v[2].x()};
std::vector<float> arr_y{t.v[0].y(),t.v[1].y(),t.v[2].y()};
std::sort(arr_x.begin(),arr_x.end());
std::sort(arr_y.begin(),arr_y.end());
for(int x=arr_x[0];x<=arr_x[2];x+=1){
for(int y=arr_y[0];y<arr_y[2];y+=1){
if(insideTriangle(x+0.5f,y+0.5f,t.v)){
//这里是框架给出的重心公式插值代码
auto[alpha, beta, gamma] = computeBarycentric2D(x+0.5f, y+0.5f, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
//\end 重心公式插值
//如果目标点的z值(绝对值)小于缓存深度
if (z_interpolated < depth_buf[get_index(x, y)]) {
Eigen::Vector3f point(x, y, 1.0f);
set_pixel(point, t.getColor());
//重置深度缓存颜色
depth_buf[get_index(x, y)] = z_interpolated;
}
}
}
}
}
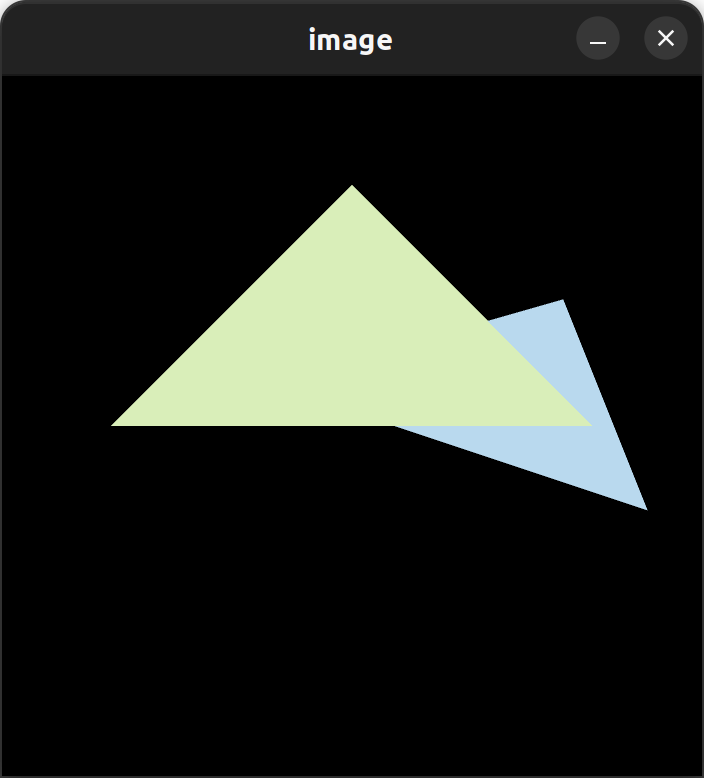
那么就完成了z-Buffer的步骤,编译运行得到这样的结果注意遮挡顺序,如果你的遮挡顺序错了,请检查你的透视投影矩阵。
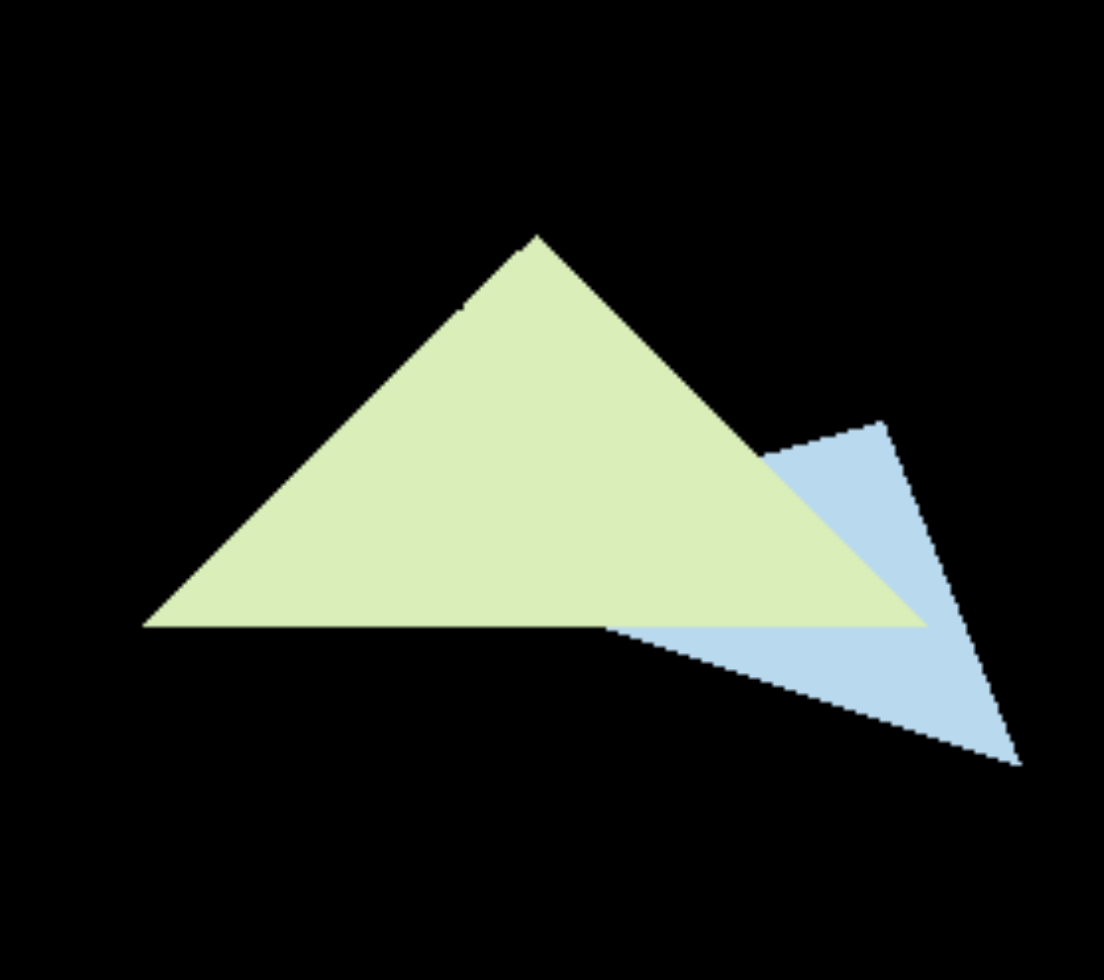
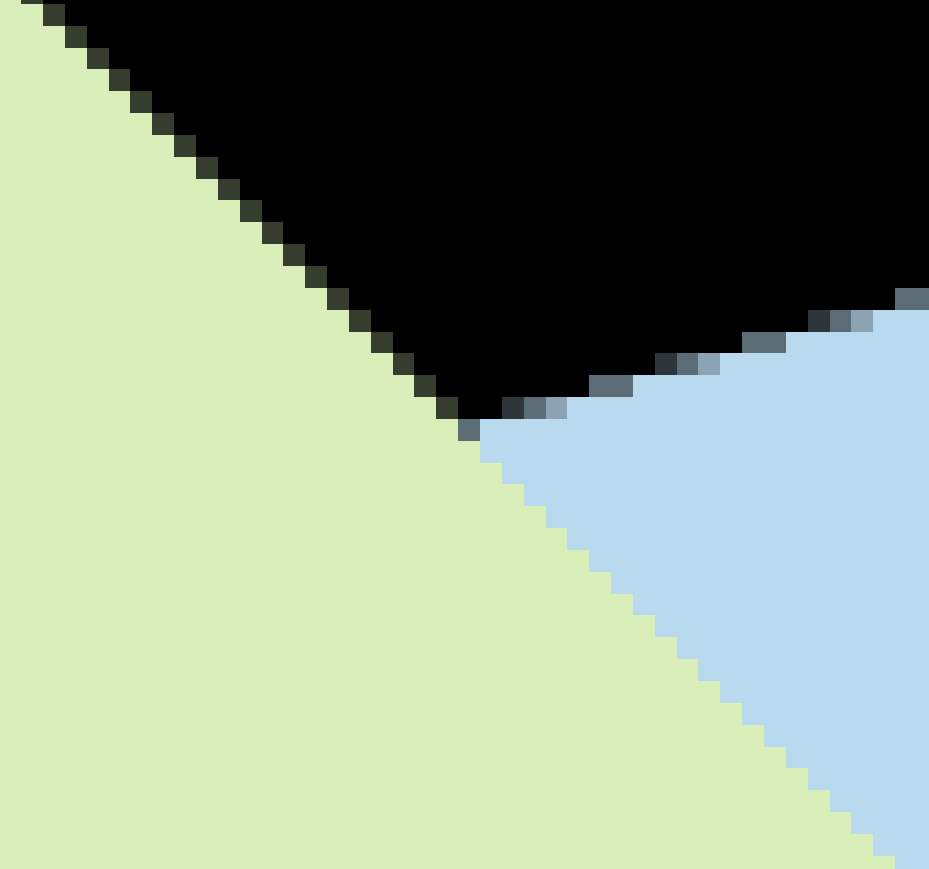
放大可以看到存在明显的锯齿,但是普通要求也到这结束了。
提高题
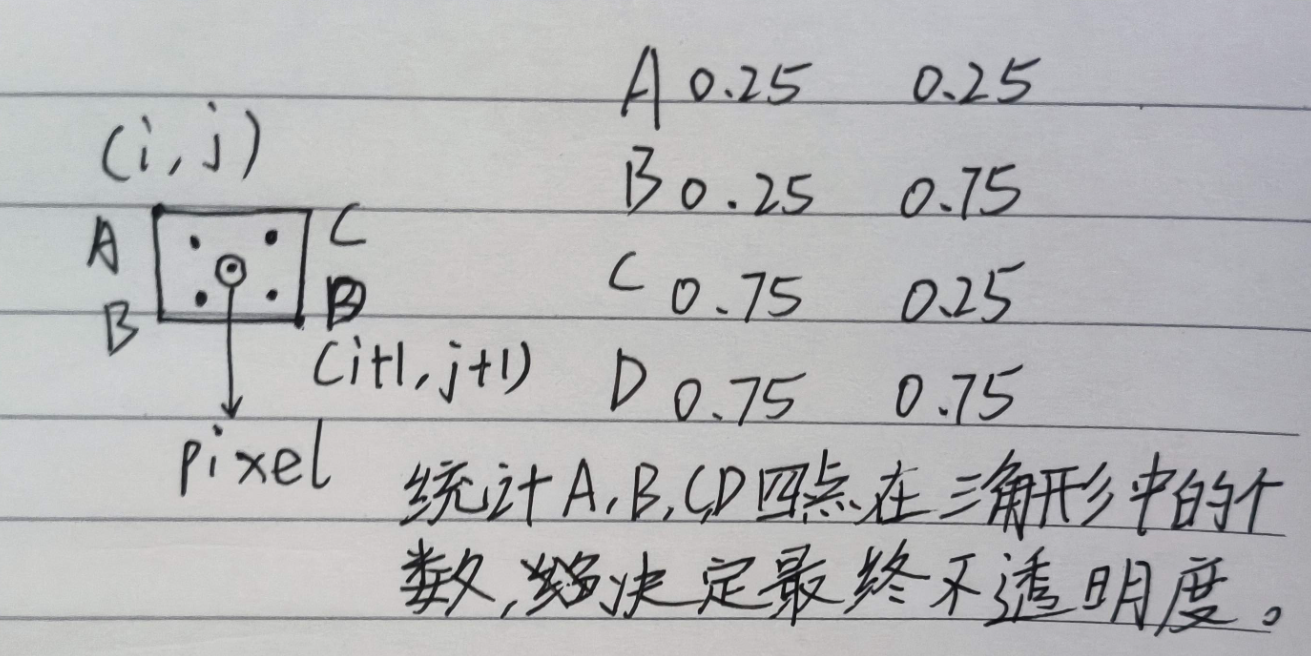
使用Surper-Sampling对一个像素进2x2超采样。
首先,我们创建两个二维向量来存储深度缓存和颜色缓存。
//rasterizer.hpp
std::vector<std::array<float,4>> surpersample_corlor_buf;
std::vector<std::array<float,4>> surpersample_depth_buf;
同时修改构造函数和重置函数
void rst::rasterizer::clear(rst::Buffers buff)
{
if ((buff & rst::Buffers::Color) == rst::Buffers::Color)
{
std::fill(frame_buf.begin(), frame_buf.end(), Eigen::Vector3f{0, 0, 0});
}
if ((buff & rst::Buffers::Depth) == rst::Buffers::Depth)
{
std::array<float,4> inf;
inf.fill(std::numeric_limits<float>::infinity());
//DIY
std::fill(depth_buf.begin(), depth_buf.end(), std::numeric_limits<float>::infinity());
std::fill(surpersample_depth_buf.begin(), surpersample_depth_buf.end(), inf);
}
}
rst::rasterizer::rasterizer(int w, int h) : width(w), height(h)
{
frame_buf.resize(w * h);
depth_buf.resize(w * h);
//DIY
surpersample_corlor_buf.resize(w * h);
surpersample_depth_buf.resize(w * h);
}
接着就是光栅化的实现了,使用附近四个点是否在三角形内作为参数,设置颜色的值。这里其实是一种不那么严谨的卷机(个人观点),可以让三角形和周围产生的锯齿消失。下面是卷机盒的设计:
代码实现如下:
for(int i=minX;i<maxX;i++)
{
for(int j=minY;j<maxY;j++)
{
int Index=get_index(i,j);
int l=0;
int IsInTriangleCount=0;
int IsDontBeCover=0;
if(IsUseSurperSampling)
{
//SurperSampling
for(auto&k : SampleOffset)
{
float SampleX=i+k.x();
float SampleY=j+k.y();
if(insideTriangle(SampleX,SampleY,t.v))
{
auto[alpha, beta, gamma] = computeBarycentric2D(SampleX, SampleY, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
// check zbuff
if(z_interpolated < surpersample_depth_buf[Index][l])
{
surpersample_depth_buf[Index][l]=z_interpolated;
IsDontBeCover++;
}
IsInTriangleCount++;
}
l=l+1;
}
Vector3f color= t.getColor()*IsInTriangleCount/4.0f;
if(IsDontBeCover>0)
{
set_pixel(Vector3f(i,j,0),color);
}
}
else
{
if(insideTriangle(i+0.5f,j+0.5f,t.v))
{
auto[alpha, beta, gamma] = computeBarycentric2D(i+0.5f, j+0.5f, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
// check zbuff
if(z_interpolated<depth_buf[Index])
{
depth_buf[Index]=z_interpolated;
set_pixel(Vector3f(i,j,1),t.getColor());
}
}
}
}
}
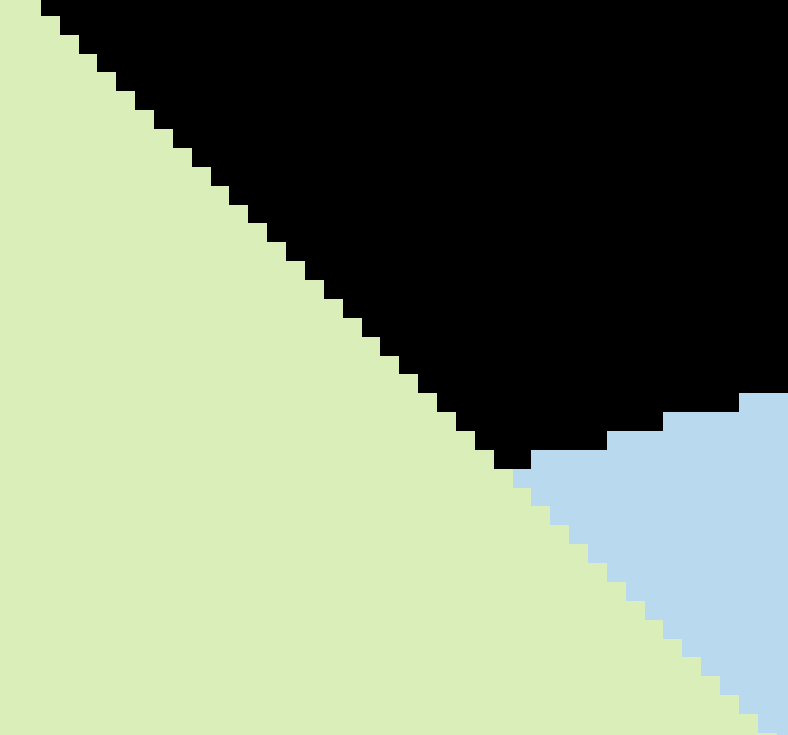
最后的输出图片如下,比起超采样之前的三角形,锯齿明显少了。
放大后可以看到明显的柔化: