这两天会持续更新一下Python处理点云数据的教程,大家可以点个关注。今天给大家分享一下点云的经典算法:CSF布料模拟算法。
1 CSF算法简介
CSF算法,全称为Cloth Simulation Filtering,是一种基于欧几里得空间中最小生成树思想的聚类算法,它可以很好地对点云数据进行分割和分类。这个算法的核心思想是把点云数据转化成一张图,然后通过逐步连接最近邻点构建出多棵生成树,再将所有生成树合并成一张图,并利用深度优先搜索、双向广搜等手段对其上点进行分割。这样就可以将点云数据快速分割成多个类别,并且获取到每个点所属的类别。
在CSF算法的基础上,可以使用其地面点滤波方法。具体方法是通过使用RANSAC算法估计地面模型的法向量,然后通过计算每个点到地面模型的距离来滤除非地面点,而最后剩下的点即为地面点。同时,需要在此基础上做一些修改来提高算法的效率:首先,将待处理的点云数据进行降采样,减少计算量;其次,使用KD树快速搜索每个点的最近邻点,加速点云数据的处理过程。
此外,CSF算法也可以结合其他技术进行优化,例如在数据预处理阶段使用数据降维技术,减少数据量;在生成树构建阶段使用多线程并行计算,提高计算效率;在分割阶段使用机器学习算法,提高分割精度等。
总之,CSF算法是一种基于图模型的聚类算法,适用于点云数据的分割和分类任务。通过与其他技术的结合,可以实现更高效、更精确的点云数据处理。
2 代码实现
2.1 项目地址
我这里的CSF算法是直接用了大佬的包,大家可以自行去下载,然后pip install安装即可。项目地址:
2.2 代码展示
我这里使用的是laspy库打开的点云文件,所以只支持.las格式的点云。你们也可以换成open3d库,这样就可以实现其他格式点云的CSF算法咯。
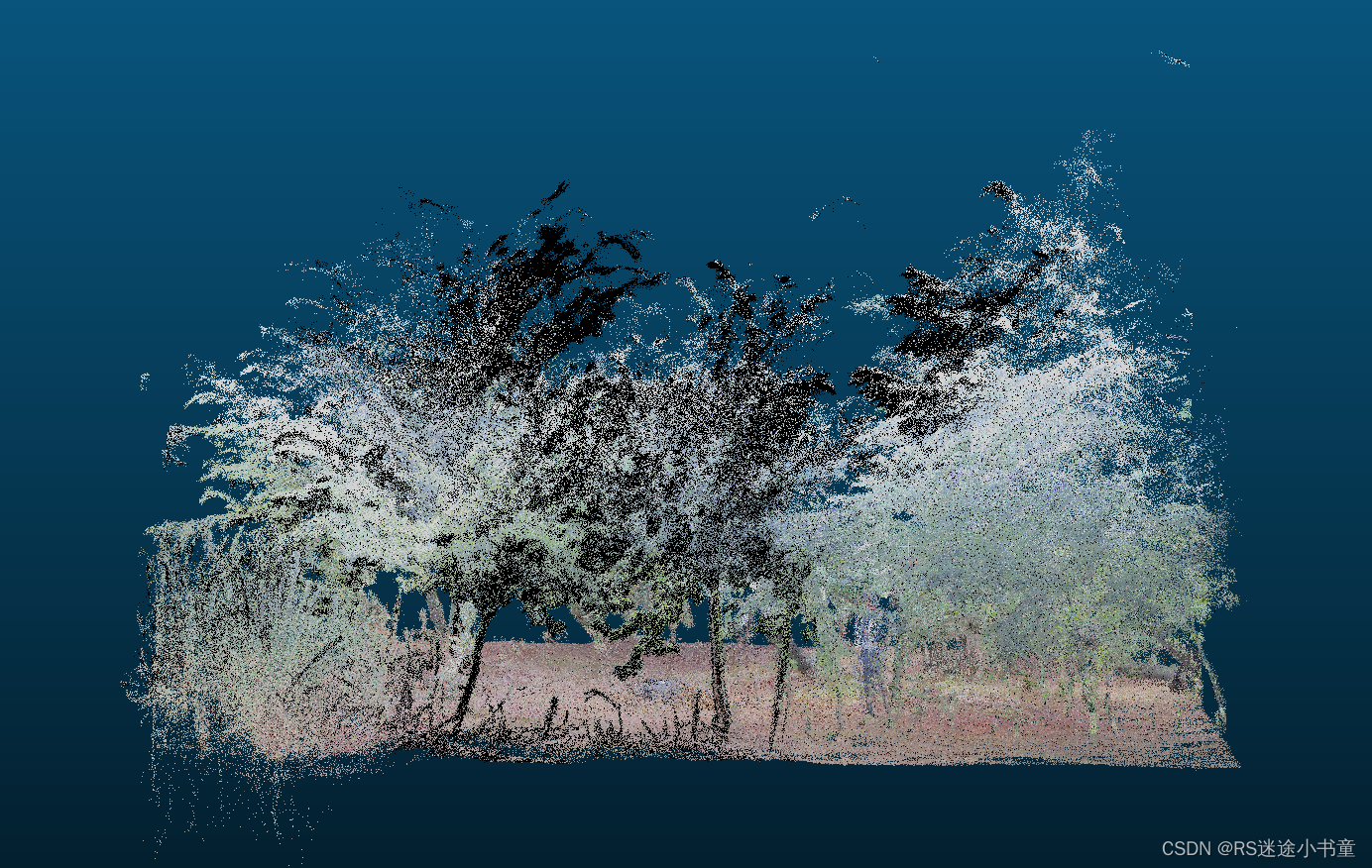
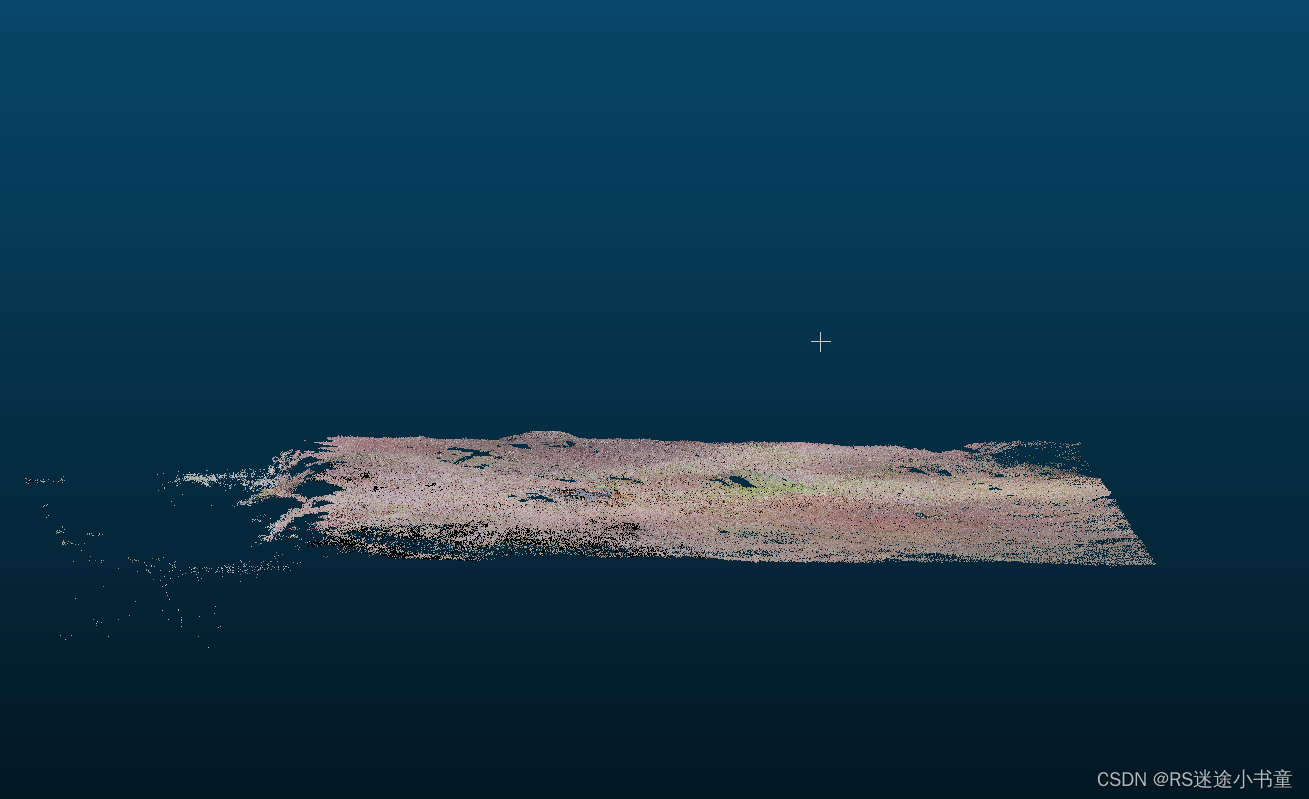
2.3 效果展示
3 总结
目前我就使用了Open3D和Laspy两个库去处理点云数据,个人觉得这两个库还是挺不错的,后面也会持续更新更多的Python处理点云数据的教程,如点云聚类、单木分割等。如果感兴趣可以关注我,目前没有设为收费专栏的想法,大家可以放心学习。