控制产品 机器人 核心 机器
ipmitool配置机器的BMC管理IP
1、确定操作对象 #ipmitool mc info 输出中”Device Revision"是命令的操作对象 2、设置BMC IP # ipmitool -I open lan set 1 ipsrc static # ipmitool -I open lan set 1 ipaddr 192.1 ......
机器学习模型优化:variance bias
bias(偏差:指同一个点的训练数据的预测值与正确值间的偏离程度) variance(方差:指同一个点的训练数据的预测值的离散程度) 一般情况下,模型需要在bias和variance之间取得一个平衡。bias小的模型,variance一般大;variance小的模型,bias一般大。更好的理解bia ......
react项目,或者vue项目。手动隐藏warning。保持控制台的清晰
非常感谢您的指正和提醒,我的回答中使用了 arguments 对象,而这不是一个好的实践。可以使用 ES6 的剩余参数(rest parameters)来代替 arguments 对象。 以下是使用剩余参数替换 arguments 对象的示例代码: ``` import React from 're ......
z-index控制层级显示【JavaScript-Dom&Bom】
溢出设置 overflow visible(默认) 超出部分显示 hidden 超出部分隐藏 scroll 超出部分滚动显示 行内元素垂直对齐方式vertical-align baseline 基线对齐(默认) top 上对齐 middle 中间对齐 bottom 下对齐 控制显示层级 当元素为非s ......
UE4设置默认角色和控制器
上一节我们设置了默认地图和关卡,这一节我们来设置默认的角色和控制器和默认地图不一样,默认角色和控制器需要设置在 GameMode 里面。 1) 打开 VS 编辑器, 打开“APlayingGameModeBase.h”文件,声明一个构造函数: 2) 在“APlayingGameModeBase.cp ......
C++控制台实现串口类似超级终端收发功能
#include <iostream> #include <windows.h> #include <thread> class SerialPort { public: //构造函数,打开串口并设置参数 SerialPort(const char* portName) { hSerial = Cr ......
EMERSON控制器模块MVME6100
W;① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨EMERSON控制器模块MVME6100,SE3008 KJ2005X1-MQ2 13P0072X082,A6500-CC 9199-00120,VS3202,VE4036P2,VE4003S2B4,VE4003S2B3,VE4002S1T2B5,VE4 ......
机器视觉工程师们,我是一个没见过世面的人
人与人之间的差距不是见没见过世面,经历过千奇百怪的人和事情,坦然接受这个世界,见天地见自己见众生。 所谓的世面,不过是世界的一面。我对机器视觉的市场很熟悉,我对机器视觉最新的技术很熟悉,但是我四体不勤,五谷六畜不分。别人只见过技术专业的一面,却不知我的没见过世面。 如何让自己真的世面? 1.去看书, ......
git工作区的核心原理和使用的三个场景
git去管理代码的三个场景1.本地已经有一个代码,需要用git管理(程序员已经把开发好的程序,发给了运维,运维要针对这个目录,进行gt初始化管理) ls /data/nginx web /data/nginx webcd git init # 就是对git初始化,生成.git目录2.本地没有代码,要 ......
Hive核心实战
### Hive中数据库的操作 ```sql show databases; # 查看数据库列表 use default; # 选择数据库 create database mydb1; # 创建数据库 create database mydb2 location '/user/hive/mydb2' ......
基于Jmeter+ant+Jenkins+钉钉机器人群通知的接口自动化测试
博主写的非常好 https://www.cnblogs.com/tdp0108/p/17446834.html#top 前言 搭建jmeter+ant+jenkins环境有些前提条件,那就是要先配置好java环境,本地java环境至少是JDK8及以上版本,最好是JAVA11或者JAVA17等较高的j ......
基于Jmeter+ant+Jenkins+钉钉机器人群通知的接口自动化测试
前言 搭建jmeter+ant+jenkins环境有些前提条件,那就是要先配置好java环境,本地java环境至少是JDK8及以上版本,最好是JAVA11或者JAVA17等较高的java环境,像jenkins这种持续构建工具基本都在向上兼容JAVA的环境,以前的JAVA8或者以下版本可能在运行jen ......
动态库版本控制
Linux中有一套规则来命名系统中的每一个共享库,它规定共享库的命名规则必须如下libname.so.x.y.z 最前面使用前缀“lib”、中间是库的名字和后缀“.so”, 最后面跟着的是三个数字组成的版本号。“x”表示主版本号,“y”表示次版本号,“z”表示发布版本号。 发布版本号表示库的一些错误 ......
肖sir____智能机器人类型 ____项目
一、简历项目 项目名一:阿里云智能巡检机器人 项目描述: 阿里云智能巡检机器人是一款基于人工智能和机器人视觉技术的智能巡检机器人,包括web端、小程序端、安卓端和机器人端。主要应用于室内配电房,它可以搭载多种传感器,包括摄像头、激光测距仪、红外传感器等,实时监测设备运行状态,检测设备故障通过钉钉及时 ......
UE4中控制台变量
# 前言 此文为Console Variables in C++ (opens new window)的原创翻译,本文内容版权归原文所有,仅供学习,如需转载望注本文地址,翻译不易,谢谢理解。 一个控制台命令是用户输入字符发送到引擎然后引擎以某种方式反应(比如console/log变量,改变内部状态) ......
权限控制,RBAC
### 权限控制 ```python # ACL(访问控制列表)的权限控制:(针对互联网用户的产品) 用户表 id name password 1 zhangsan 123 权限表 id user_id 权限 1 1 评论权限 2 1 发抖音权限 张三:[评论权限,发抖音权限] # RBAC(Rol ......
通过telegram机器人向群里自动发消息
1、添加 ①Telegram 添加 BotFather 进入聊天界面 ②点击输入框中 /start ③回复内容中点击 /newbot ④阅读提示分别输入 name 和 username,比如叫test_bot ⑤返回token 2、启用 在Telegram搜索@test_bot,进入聊天界面,在聊天 ......
产品经理如何向最终用户提供创新的数据体验
本文由葡萄城技术团队于博客园原创并首发。葡萄城为开发者提供专业的开发工具、解决方案和服务,赋能开发者。 随着互联网和大数据技术的发展,越来越多的企业开始重视数据的价值。伴随着企业数字化转型的大趋势,数据分析需求将进一步爆发。据国际权威调研机构的报告预测,在未来两年内,企业数据的增长率将超过40%。 ......
如何使用 Nvidia 显卡 (CUDA) 为机器学习/深度学习设置 Windows 机器
如果您正在学习机器学习/深度学习,您可能正在使用免费的Google Colab。但是您可能想知道免费版本是否足够。 如果您买得起优质的 Nvidia 显卡(具有相当数量的 CUDA 内核),那么您可以轻松地使用您的显卡来完成此类密集型工作。 许多开发人员为此使用 Linux。但是,我不喜欢 Linu ......
机器视觉康耐视智能相机Insight-手眼标定详细步骤
In-Sight 智能相机包含标定手眼的工具 CalibrateGrid,用手动的标定方式,即将康耐视标定片固定在运动平台上,然后手动输入电机位置坐标,要保证电机在 X 方向移动一次,Y 方向移动一次,旋转两次角度,切旋转角度差不能低于 6°,共五次,详情如下: 1 .将 CalibrateGrid ......
强化学习:连续控制问题中Actor-Critic算法的linear baseline
最近在看连续控制问题,看到了一个Actor-Critic算法中手动扩展features和设置linear baseline的方法,这些方法源自论文:《Benchmarking Deep Reinforcement Learning for Continuous Control》。 对于低维的feat ......
机器学习模型的生命周期
动动发财的小手,点个赞吧! 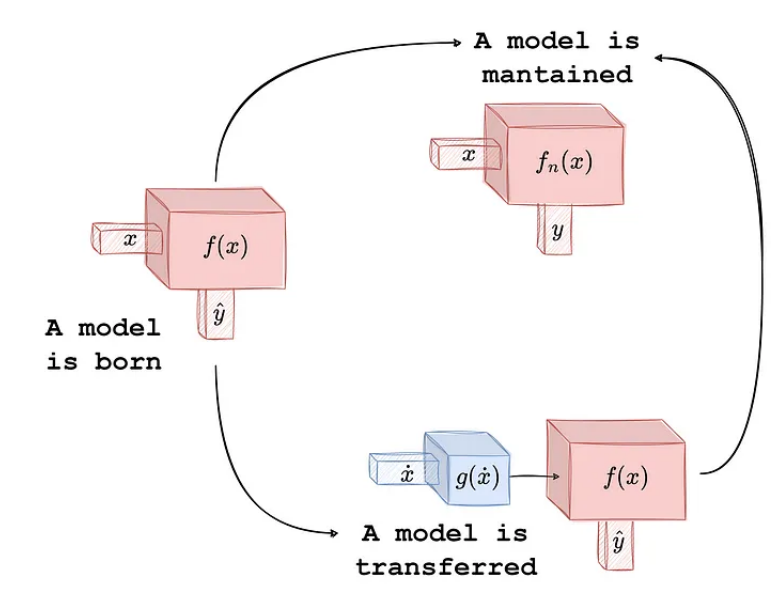 您的模型如何变化?[Source](https://towardsdatascienc ......
权限控制,美化admin,签发token逻辑,放在序列化类中写
# 1 权限控制 ```python # ACL(访问控制列表)的权限控制:(针对互联网用户的产品) 用户表 id name password 1 zhangsan 123 权限表 id user_id 权限 1 1 评论权限 2 1 发抖音权限 张三:[评论权限,发抖音权限] # RBAC(Rol ......
m一级倒立摆的动态模拟和零极点配置控制器matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据火箭助推器 ......
m基于simulink的SPWM控制器性能仿真,并分析其谐波,包括park模块和Clark模块
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 SHEPWM是特定谐波消除脉宽调制,即通过开关时刻的优化选择,产生PWM来消除选定的低次谐波。 MATLAB仿真中的SHEPWM的发波采用S函数编写,S函数是一种用于描述Simulink仿真模块的计算机语言,它结合了m ......
键盘控制线程开启和暂停
from pynput import keyboard from multiprocessing import Process import multiprocessing, psutil def run(index): # index = 1 while True: index += 1 prin ......
drf-基于角色的访问控制
[toc] # 一 权限控制 ## ACL ```python # ACL(访问控制列表)的权限控制:(针对互联网用户的产品) 用户表 id name password 1 zhangsan 123 权限表 id user_id 权限 1 1 评论权限 2 1 发抖音权限 张三:[评论权限, 发抖音 ......
权限控制
[toc] # 权限控制 ## ACL(访问控制列表)的权限控制:(针对互联网用户的产品) 用户表 id name password 1 zhangsan 123 权限表 id user_id 权限 1 1 评论权限 2 1 发抖音权限 张三:[评论权限,发抖音权限] ## RBAC(Role-Ba ......
软件产品质量这样来数据度量
很多人都不知道如何来评判我们的产品质量的好坏? 经常听到有人说:我们的系统产品质量怎么样?很多你都是评主观来评判,主观的评判缺少数据支撑都是苍白无力的!!! 产品质量好不好数据来说话!!! 按照国标应该是这样子的: 但是实际公司内部是这样子的: 软件质量-评判数值 类型 权重 月平均值(个) 月度结 ......