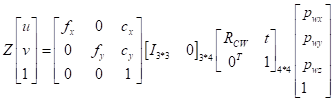
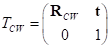
相机成像原理 三维世界中的点透过光心映射在相机物理成像平面上 相机坐标系下的点P小孔投影到照片中的像素位置 世界坐标系到相机坐标系的转换 本栏目推荐文章Jmeter 参数化之用户参数函数的参数类型手把手教你MongoDB 数据库连接URL 格式、authSource参数11-函数进阶-参数类型Python逆向爬虫入门教程: 酷狗音乐加密参数signature逆向解析Chrome 浏览器插件 V3 版本 Manifest.json 文件中 Action 的类型(Types)、方法(Methods)和事件(Events)的属性和参数解析C# 方法中的 引用参数 ref out 的使用JVM内存参数设置[cpp]: 以模板作为模板参数 -- <template>Dating Java8系列之通过行为参数化传递代码参数 相机视觉 机器 参数 相机 参数 相机 相机 问题pin相机 相机ccd 相机cesium 实时 相机 相机app insight相机cognex 原理 相机