单应矩阵的求解
将上式简化,并规定棋盘格的左下角为世界坐标的原点,棋盘格的左上角为像素坐标的原点,这样棋盘格上所有的点都处于同一平面,此时ZW=0。
这里注意规定了世界坐标的原点后棋盘格上的任意角点的坐标就可以由长度确定,例如棋盘格的尺寸为5毫米,则左下角角点的右边那个角点坐标就是(5,0,0);同理像素坐标则按该角点是第几个像素来计算,例如该角点为第一行第一列的像素,则它的像素坐标为(1,1)。


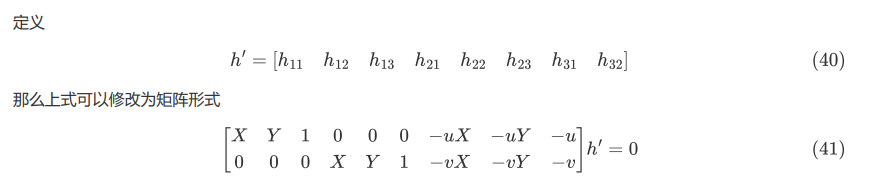
由39,41式可知,一张图片中一个角点的像素坐标世界坐标可以确定两个方程,则8个未知数则需要4个角点组成8个方程。而实际场景中存在噪声,特征点误匹配等现象,4个点是往往不够的,因此可用远大于4个点组成多组方程来计算单应矩阵。这样的话就变成了一个超定方程的问题,因此只有最小二乘解。 (式41)
(式41)
值得注意的是一张棋盘格对应一个单应矩阵。