1.算法仿真效果
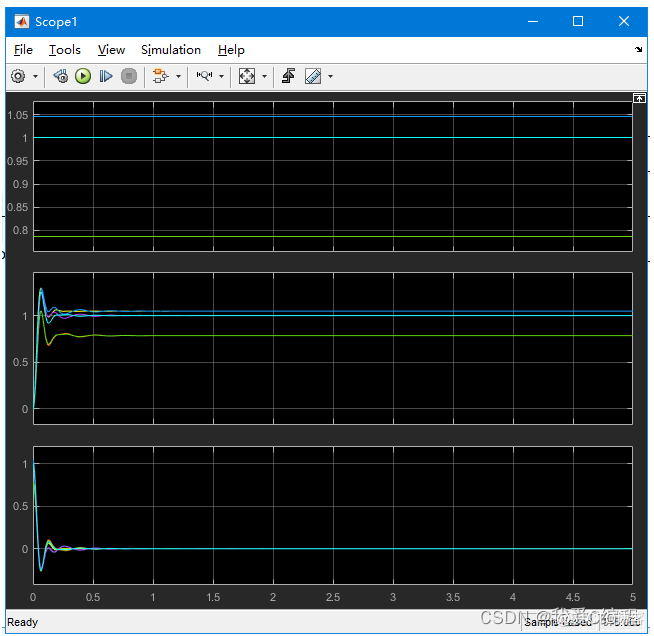
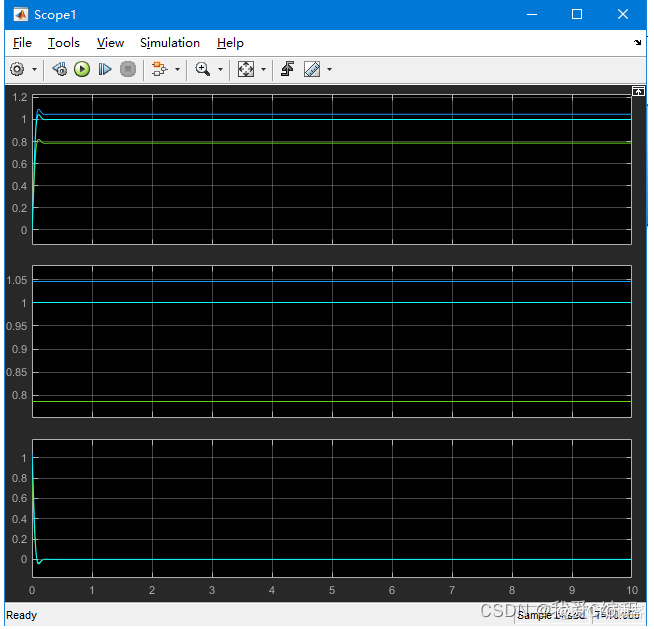
matlab2022a仿真结果如下:

从图仿真结果可知,PID控制器,其超调较大,且控制器进入收敛状态时间也最长,。对于模糊PID控制器,其超调小于PID控制器,且收敛速度也较快,因此其性能优于传统的PID控制器。对于MPC控制器,其超调最小,控制器进入稳定状态速度也最快,因此其控制性能最优,但是MPC的上升时间较慢,大约需要0.1s左右完成。但在实际情况下,对控制对象起到影响的主要是控制器的超调和收敛稳定时间两个因素。因此,MPC控制器的控制效果最优,其次为模糊PID控制器,最次是PID控制器。

2.算法涉及理论知识概要
根据PID控制器的基本原理,PID控制器的结构如下图所示:

PID控制器的比例调整参数,积分调整参数以及微分调整参数对系统的控制效果有着十分明显的影响。随着微分调整参数的变小,PD控制器的阶跃响应有较大的超调量,但是系统的控制响应速度较慢。反之,随着微分调整参数不断变大,系统超调减小,系统的控制响应速度较快。在本课题中,控制器的参数设置为Kp= 1000000,Ki= 10000,Kd=15000。
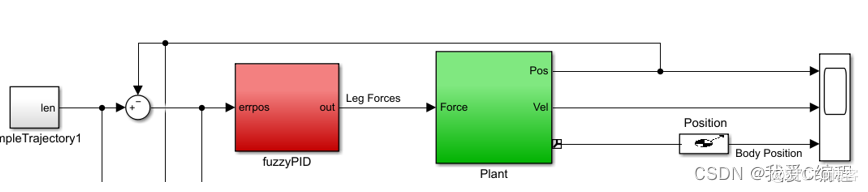
模糊PID控制器的基本结构如下所示:

在实现模糊PID控制器之前,我们首先需要设计模糊规则表,在本课题中,我们选取七个语言等级作为模糊控制器的语言等级,即负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。然后模糊控制器的输入为E和Ec,输出为PID控制器的、、的值的调整值。我们这里采用的隶属函数为系统中的NB和PB采用正态型分布;NM、NS、Z0、Ps、PM则采用三角形分布。 完成隶属函数构建之后,开始设计模糊规则,模糊规则设置原则为:当输入误差E和Ec较大的时候,则应该快速消除误差,当输入误差E和Ec较小的时候,这主要控制目的是防止超调过大。因此我们构建如下的模糊规则表:

模糊fis规则文件如下:
[System] Name='files' Type='mamdani' Version=2.0 NumInputs=2 NumOutputs=3 NumRules=49 AndMethod='min' OrMethod='max' ImpMethod='min' AggMethod='max' DefuzzMethod='centroid' [Input1] Name='E' Range=[-6 6] NumMFs=7 MF1='NB':'gaussmf',[0.9716 -5.856] MF2='NM':'trimf',[-6 -4 -2] MF3='NS':'trimf',[-4 -2 0] MF4='ZO':'trimf',[-2 0 2] MF5='PS':'trimf',[0 2 4] MF6='PM':'trimf',[2 4 6] MF7='PB':'gaussmf',[0.8494 6] [Input2] Name='Ec' Range=[-3 3] NumMFs=7 MF1='NB':'gaussmf',[0.4247 -3] MF2='NM':'trimf',[-3 -2 -1] MF3='NS':'trimf',[-2 -1 0] MF4='ZO':'trimf',[-1 0 1] MF5='PS':'trimf',[0 1 2] MF6='PM':'trimf',[1 2 3] MF7='PB':'gaussmf',[0.4247 3] [Output1] Name='Kp' Range=[0 1] NumMFs=7 MF1='NB':'gaussmf',[0.07079 0] MF2='NM':'trimf',[0 0.1667 0.3333] MF3='NS':'trimf',[0.1667 0.3333 0.5] MF4='ZO':'trimf',[0.3333 0.5 0.6667] MF5='PS':'trimf',[0.5 0.6667 0.8333] MF6='PM':'trimf',[0.6667 0.8333 1] MF7='PB':'gaussmf',[0.07079 1] [Output2] Name='Ki' Range=[0 1] NumMFs=7 MF1='NB':'gaussmf',[0.07078 0] MF2='NM':'trimf',[0 0.1667 0.3333] MF3='NS':'trimf',[0.1667 0.3333 0.5] MF4='ZO':'trimf',[0.3333 0.5 0.6667] MF5='PS':'trimf',[0.5 0.6667 0.8333] MF6='PM':'trimf',[0.6667 0.8333 1] MF7='PB':'gaussmf',[0.07078 1] [Output3] Name='Kd' Range=[0 1] NumMFs=7 MF1='NB':'gaussmf',[0.07078 0] MF2='NM':'trimf',[0 0.1667 0.3333] MF3='NS':'trimf',[0.1667 0.3333 0.5] MF4='ZO':'trimf',[0.3333 0.5 0.6667] MF5='PS':'trimf',[0.5 0.6667 0.8333] MF6='PM':'trimf',[0.6667 0.8333 1] MF7='PB':'gaussmf',[0.07078 1] [Rules] 1 1, 7 1 5 (1) : 1 1 2, 7 1 3 (1) : 1 1 3, 6 2 1 (1) : 1 1 4, 6 2 1 (1) : 1 1 5, 5 3 1 (1) : 1 1 6, 4 4 2 (1) : 1 1 7, 4 4 5 (1) : 1 2 1, 7 1 5 (1) : 1 2 2, 7 1 3 (1) : 1 2 3, 6 2 1 (1) : 1 2 4, 5 3 2 (1) : 1 2 5, 5 3 2 (1) : 1 2 6, 4 4 3 (1) : 1 2 7, 3 4 4 (1) : 1 3 1, 6 1 4 (1) : 1 3 2, 6 2 3 (1) : 1 3 3, 6 3 2 (1) : 1 3 4, 5 3 2 (1) : 1 3 5, 4 4 3 (1) : 1 3 6, 3 5 3 (1) : 1 3 7, 3 5 4 (1) : 1 4 1, 6 2 4 (1) : 1 4 2, 6 2 3 (1) : 1 4 3, 5 3 3 (1) : 1 4 4, 4 4 3 (1) : 1 4 5, 3 5 3 (1) : 1 4 6, 2 6 3 (1) : 1 4 7, 2 6 4 (1) : 1 5 1, 5 2 4 (1) : 1 5 2, 5 3 4 (1) : 1 5 3, 4 4 4 (1) : 1 5 4, 3 5 4 (1) : 1 5 5, 3 5 4 (1) : 1 5 6, 2 6 4 (1) : 1 5 7, 2 7 4 (1) : 1 6 1, 5 4 7 (1) : 1 6 2, 4 4 3 (1) : 1 6 3, 3 5 5 (1) : 1 6 4, 2 6 5 (1) : 1 6 5, 2 6 5 (1) : 1 6 6, 2 7 5 (1) : 1 6 7, 1 7 7 (1) : 1 7 1, 4 4 7 (1) : 1 7 2, 4 4 6 (1) : 1 7 3, 2 5 6 (1) : 1 7 4, 2 6 6 (1) : 1 7 5, 2 6 5 (1) : 1 7 6, 1 7 5 (1) : 1 7 7, 1 7 7 (1) : 1
根据MPC控制器的基本原理,MPC控制器的基本结构如下图所示:
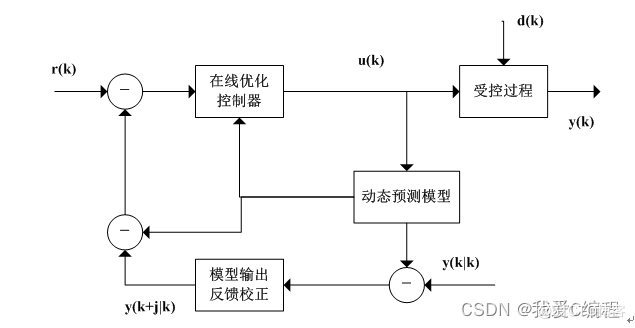
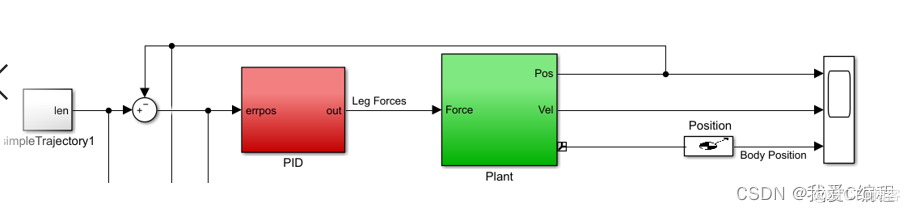
MPC控制器结构较为复杂,这里我们采用SIMULINK自带的MPC工具箱来实现该结构,我们构建如下的MPC仿真模型:
这里,空间状态变量矩阵A,B,C,D为6*6维度的矩阵。本文通过如下方法,将SIMULINK建立的3-PUU仿真模型转换为空间状态方程。分别通过一个阶跃响应输入到公式3的空间状态方程中和3-PUU并联机构SIMULINK仿真模型,通过对比空间状态方程输出和3-PUU并联机构SIMULINK仿真模型输出是否接近,来计算对应的空间状态变量矩阵A,B,C,D,在本课题中,我们通过测试得到空间状态变量矩阵A,B,C,D分别为:

3.MATLAB核心程序

rng('default')
load piderr.mat
t1=ans.Time;
d1=ans.Data(:,1);
load fuzzypiderr.mat
t2=ans.Time;
d2=ans.Data(:,1);
load mpc.mat
t3=ans.Time;
d3=ans.Data(:,1);
figure;
plot(t1(1:end),d1(1:end),'r');
hold on
plot(t2(1:end),d2(1:end),'b');
hold on
plot(t3(1:end),d3(1:end),'g','LineWidth',2);
hold on
grid on
legend('PID','Fuzzy PID','MPC');
xlabel('time(s)');
ylabel('error');
xlim([0,1]);