
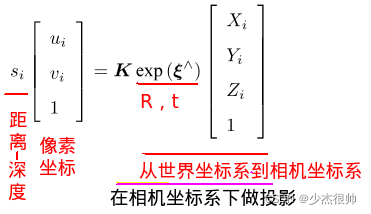
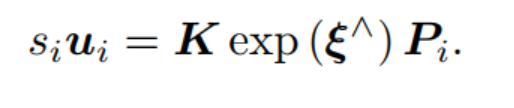
李代数表现形式
https://blog.csdn.net/weixin_49804978/article/details/121922128
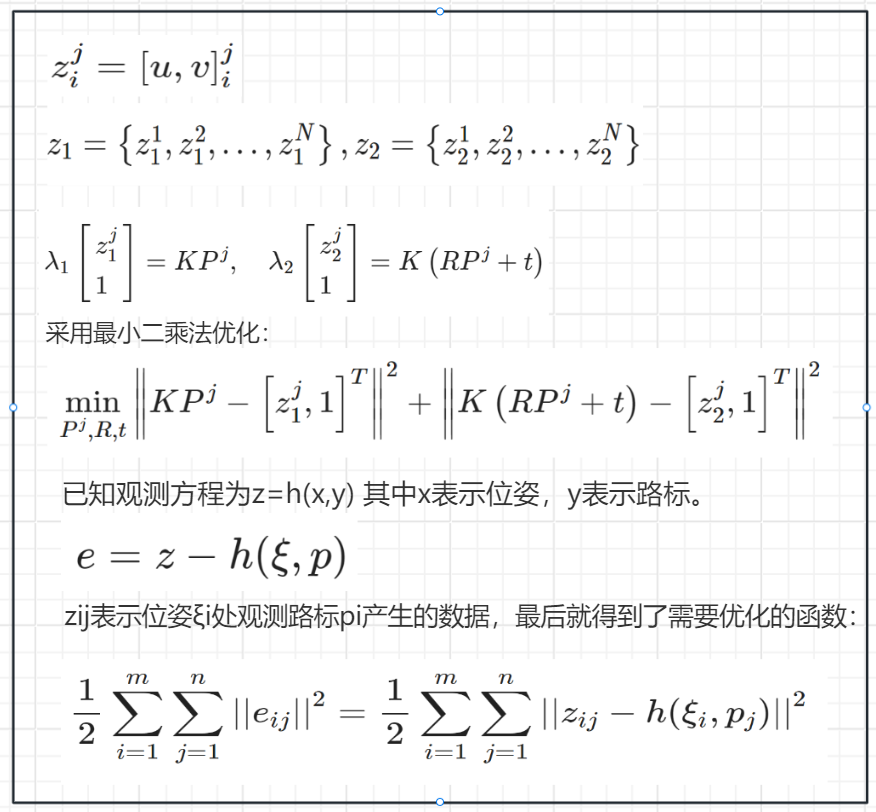
由于相机位姿未知以及观测点的噪声,该等式存在一个误差。我们将误差求和,构建最小二乘问题,然后寻找做好的相机位姿,使它最小化:
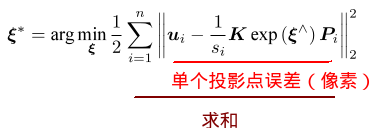
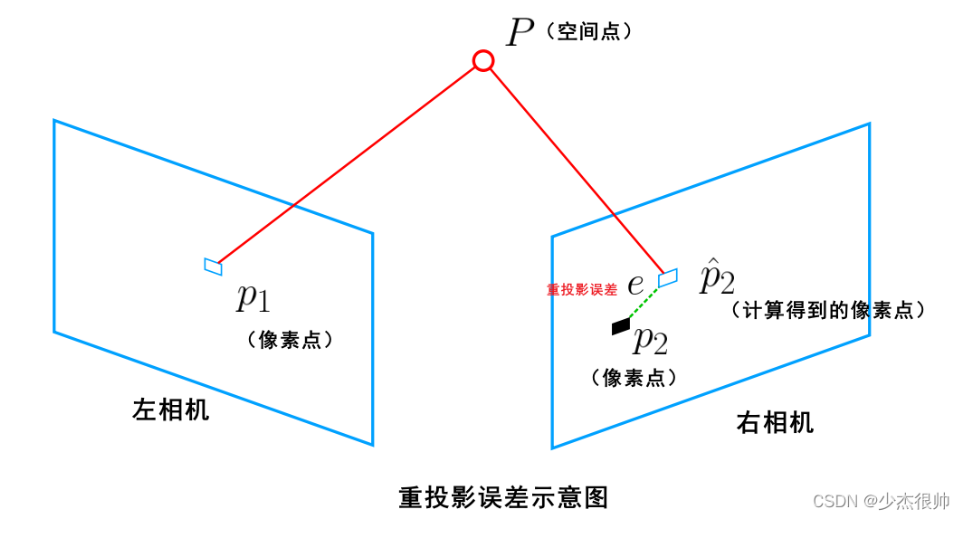
该问题的误差项,是将像素坐标(观测到的投影位置)与 3D 点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称之为重投影误差。
(用高斯牛顿法/列文伯格-马夸尔特方法求解)
李代数表现形式
https://blog.csdn.net/weixin_49804978/article/details/121922128
由于相机位姿未知以及观测点的噪声,该等式存在一个误差。我们将误差求和,构建最小二乘问题,然后寻找做好的相机位姿,使它最小化:
该问题的误差项,是将像素坐标(观测到的投影位置)与 3D 点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称之为重投影误差。
(用高斯牛顿法/列文伯格-马夸尔特方法求解)