图形渲染管线(流水线pipeline)可以被划分为两个主要部分:第一部分把你的3D坐标转换为2D坐标,第二部分是把2D坐标转变为实际的有颜色的像素
图形渲染管线
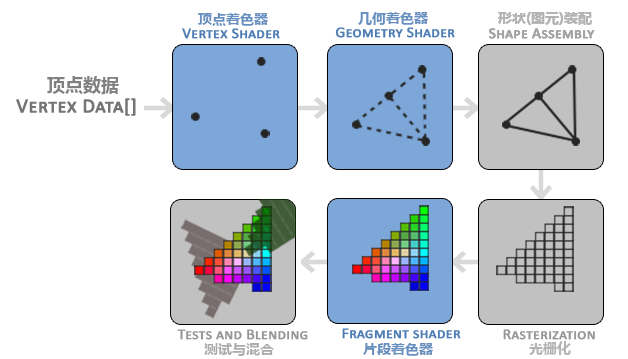
图形渲染管线接受一组3D坐标,然后把它们转变为你屏幕上的有色2D像素输出。图形渲染管线可以被划分为几个阶段,每个阶段将会把前一个阶段的输出作为输入。所有这些阶段都是高度专门化的(它们都有一个特定的函数),并且很容易并行执行。正是由于它们具有并行执行的特性,当今大多数显卡都有成千上万的小处理核心,它们在GPU上为每一个渲染流水线阶段运行各自的小程序,从而在图形渲染管线中快速处理你的数据。这些小程序叫做着色器(Shader)。
有些着色器可以由开发者配置,因为允许用自己写的着色器来代替默认的,所以能够更细致地控制图形渲染管线中的特定部分了。因为它们运行在GPU上,所以节省了宝贵的CPU时间。OpenGL着色器是用OpenGL着色器语言(OpenGL Shading Language, GLSL)写成的面,你会看到一个图形渲染管线的每个阶段的抽象展示。要注意蓝色部分代表的是我们可以注入自定义的着色器的部分。
为了让OpenGL知道我们的坐标和颜色值构成的到底是什么,OpenGL需要你去指定这些数据所表示的渲染类型。我们是希望把这些数据渲染成一系列的点?一系列的三角形?还是仅仅是一个长长的线?做出的这些提示叫做图元(Primitive),任何一个绘制指令的调用都将把图元传递给OpenGL。这是其中的几个:GL_POINTS、GL_TRIANGLES、GL_LINE_STRIP。
图形渲染管线的第一个部分是 顶点着色器(Vertex Shader) ,它把一个单独的顶点作为输入。顶点着色器主要的目的是把3D坐标转为另一种3D坐标(后面会解释),同时顶点着色器允许我们对顶点属性进行一些基本处理。
图元装配(Primitive Assembly) 阶段将顶点着色器输出的所有顶点作为输入(如果是GL_POINTS,那么就是一个顶点),并所有的点装配成指定图元的形状;本节例子中是一个三角形。
图元装配阶段的输出会传递给 几何着色器(Geometry Shader)。几何着色器把图元形式的一系列顶点的集合作为输入,它可以通过产生新顶点构造出新的(或是其它的)图元来生成其他形状。例子中,它生成了另一个三角形。
几何着色器的输出会被传入 光栅化阶段(Rasterization Stage),这里它会把图元映射为最终屏幕上相应的像素,生成供片段着色器(Fragment Shader)使用的片段(Fragment)。在片段着色器运行之前会执行裁切(Clipping)。裁切会丢弃超出你的视图以外的所有像素,用来提升执行效率。
片段着色器 的主要目的是计算一个像素的最终颜色,这也是所有OpenGL高级效果产生的地方。通常,片段着色器包含3D场景的数据(比如光照、阴影、光的颜色等等),这些数据可以被用来计算最终像素的颜色
在所有对应颜色值确定以后,最终的对象将会被传到最后一个阶段,我们叫做 Alpha测试和混合(Blending)阶段。这个阶段检测片段的对应的深度(和模板(Stencil))值(后面会讲),用它们来判断这个像素是其它物体的前面还是后面,决定是否应该丢弃。这个阶段也会检查alpha值(alpha值定义了一个物体的透明度)并对物体进行混合(Blend)。所以,即使在片段着色器中计算出来了一个像素输出的颜色,在渲染多个三角形的时候最后的像素颜色也可能完全不同。
总结
顶点着色器->图元装配器->几何着色器->光栅化->片元着色器->alpha测试和blending
顶点着色
标准化设备坐标(Normalized Device Coordinates, NDC)
一旦你的顶点坐标已经在顶点着色器中处理过,它们就应该是标准化设备坐标了,标准化设备坐标是一个x、y和z值在-1.0到1.0的一小段空间。任何落在范围外的坐标都会被丢弃/裁剪,不会显示在你的屏幕上。下面你会看到我们定义的在标准化设备坐标中的三角形(忽略z轴):
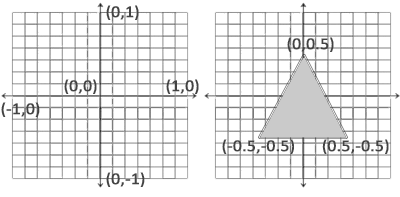
float vertices[] = {
-0.5f, -0.5f, 0.0f,
0.5f, -0.5f, 0.0f,
0.0f, 0.5f, 0.0f
};
定义好顶点数据后,会把它作为输入发送给图形渲染管线的第一个处理阶段:顶点着色器。它会在GPU上创建内存用于储存我们的顶点数据,还要配置OpenGL如何解释这些内存,并且指定其如何发送给显卡。顶点着色器接着会处理我们在内存中指定数量的顶点。
我们通过 顶点缓冲对象(Vertex Buffer Objects, VBO)管理这个内存,它会在GPU显存中储存大量顶点。使用这些缓冲对象的好处是我们可以一次性的发送一大批数据到显卡上,而不是每个顶点发送一次。从CPU把数据发送到显卡相对较慢,所以只要可能我们都要尝试尽量一次性发送尽可能多的数据。当数据发送至显卡的内存中后,顶点着色器几乎能立即访问顶点,这是个非常快的过程。
VAO,VBO,EBO
- 顶点数组对象:Vertex Array Object,VAO
- 顶点缓冲对象:Vertex Buffer Object,VBO
- 元素缓冲对象:Element Buffer Object,EBO 或 索引缓冲对象 Index Buffer Object,IBO
VBO即是读取的如.obj文件中的顶点坐标数据,紧密排列,毫无头绪,而VAO确定去哪个VBO按什么间隔获得顶点、uv、法向等数据。VAO可以绑定多个VBO
https://www.bilibili.com/video/BV11W411N7b9?p=6&vd_source=1b365adaeb52aeeff61b7a3b71567cc3
EBO
如果绘制一个矩形,那么需要两个三角形组成,即六个顶点,但实际只需四个顶点就能表示,这样开销会很大。所以需要EBO存储需要绘制的顶点的索引
float vertices[] = {
0.5f, 0.5f, 0.0f, // 右上角
0.5f, -0.5f, 0.0f, // 右下角
-0.5f, -0.5f, 0.0f, // 左下角
-0.5f, 0.5f, 0.0f // 左上角
};
unsigned int indices[] = {
// 注意索引从0开始!
// 此例的索引(0,1,2,3)就是顶点数组vertices的下标,
// 这样可以由下标代表顶点组合成矩形
0, 1, 3, // 第一个三角形
1, 2, 3 // 第二个三角形
};
#version 330 core \n
layout (location = 0) in vec3 aPos; \n
void main() { gl_Position = vec4(aPos.x, aPos.y, aPos.z, 1.0); }
