参考链接:http://www.360doc.com/content/18/0310/07/6322459_735819151.shtml
https://blog.51cto.com/luohenyueji/5950066
相机标定是一个很基本的数学问题,我一般这样估算一个无畸变相机内参:
1.fx=fy,fx等于图像的长宽之和的一半。如果有差距,会视情况调整,但是仍然保证fx=fy。
2.cx、cy等于图像宽、长的一半。
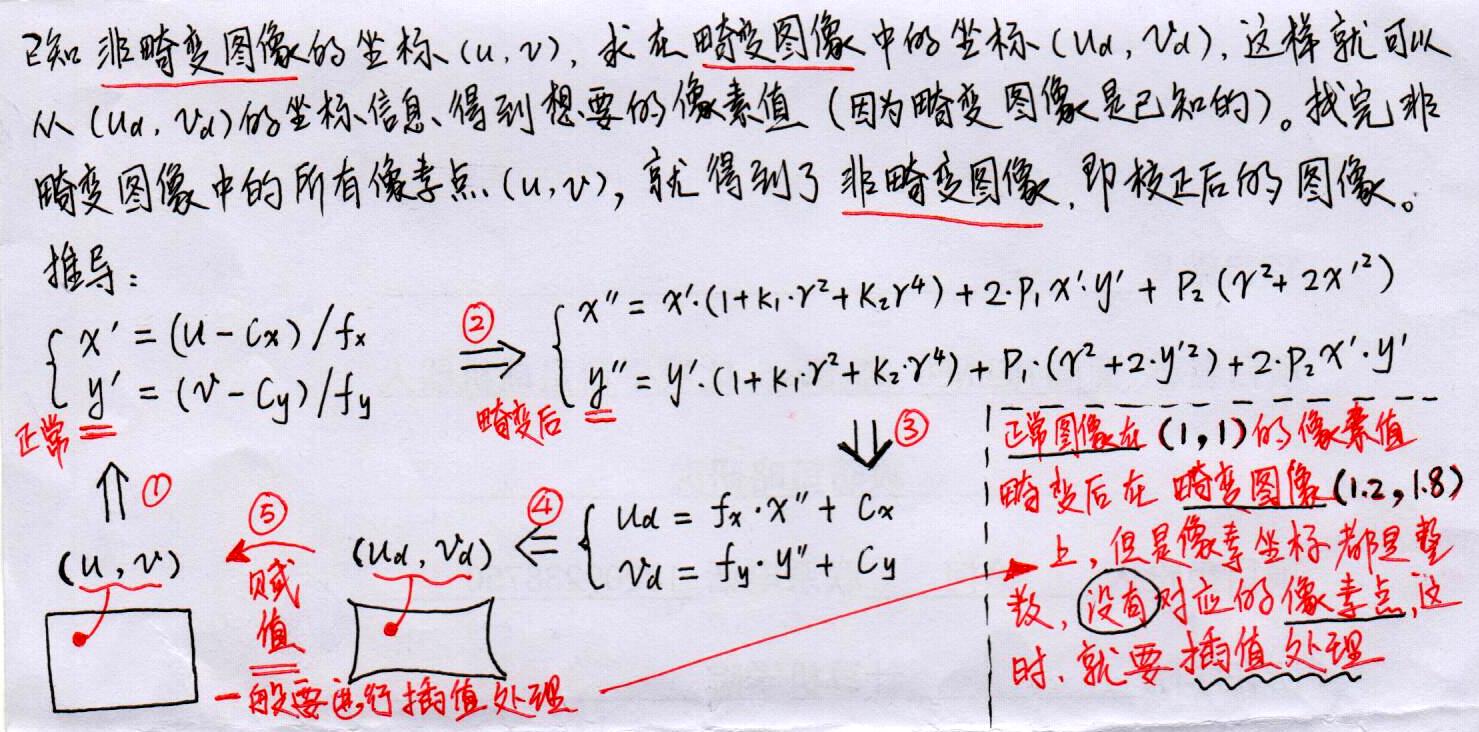
对于有畸变的相机,也可能适用的。这里给出一个相机畸变模型,畸变系数一般是5个。由公式看出,如果畸变程度很小,畸变系数应该趋于0。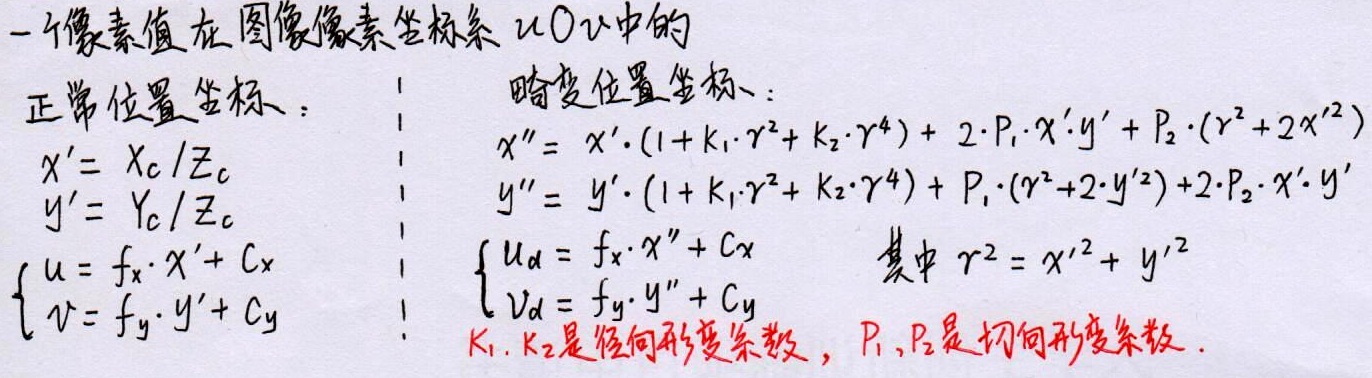
我使用了以下代码进行相机标定,但是出现了问题,就是同一个相机不同图片测试出来的参数是相差很大的:
#include <opencv2/opencv.hpp> #include <stdio.h> #include <iostream> using namespace std; using namespace cv; // Defining the dimensions of checkerboard // 定义棋盘格的尺寸 int CHECKERBOARD[2]{ 6,9 }; int main() { // Creating vector to store vectors of 3D points for each checkerboard image // 创建矢量以存储每个棋盘图像的三维点矢量 std::vector<std::vector<cv::Point3f> > objpoints; // Creating vector to store vectors of 2D points for each checkerboard image // 创建矢量以存储每个棋盘图像的二维点矢量 std::vector<std::vector<cv::Point2f> > imgpoints; // Defining the world coordinates for 3D points // 为三维点定义世界坐标系 std::vector<cv::Point3f> objp; for (int i{ 0 }; i < CHECKERBOARD[1]; i++) { for (int j{ 0 }; j < CHECKERBOARD[0]; j++) { objp.push_back(cv::Point3f(j, i, 0)); } } // Extracting path of individual image stored in a given directory // 提取存储在给定目录中的单个图像的路径 std::vector<cv::String> images; // Path of the folder containing checkerboard images // 包含棋盘图像的文件夹的路径 std::string path = "./test/*.jpg"; // 使用glob函数读取所有图像的路径 cv::glob(path, images); cv::Mat frame, gray; // vector to store the pixel coordinates of detected checker board corners // 存储检测到的棋盘转角像素坐标的矢量 std::vector<cv::Point2f> corner_pts; bool success; // Looping over all the images in the directory // 循环读取图像 for (int i{ 0 }; i < images.size(); i++) { frame = cv::imread(images[i]); if (frame.empty()) { continue; } if (i == 40) { int b = 1; } cout << "the current image is " << i << "th" << endl; cv::cvtColor(frame, gray, cv::COLOR_BGR2GRAY); // Finding checker board corners // 寻找角点 // If desired number of corners are found in the image then success = true // 如果在图像中找到所需数量的角,则success = true // opencv4以下版本,flag参数为CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FAST_CHECK | CV_CALIB_CB_NORMALIZE_IMAGE success = cv::findChessboardCorners(gray, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_FAST_CHECK | CALIB_CB_NORMALIZE_IMAGE); /* * If desired number of corner are detected, * we refine the pixel coordinates and display * them on the images of checker board */ // 如果检测到所需数量的角点,我们将细化像素坐标并将其显示在棋盘图像上 if (success) { // 如果是OpenCV4以下版本,第一个参数为CV_TERMCRIT_EPS | CV_TERMCRIT_ITER cv::TermCriteria criteria(TermCriteria::EPS | TermCriteria::Type::MAX_ITER, 30, 0.001); // refining pixel coordinates for given 2d points. // 为给定的二维点细化像素坐标 cv::cornerSubPix(gray, corner_pts, cv::Size(11, 11), cv::Size(-1, -1), criteria); // Displaying the detected corner points on the checker board // 在棋盘上显示检测到的角点 cv::drawChessboardCorners(frame, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, success); objpoints.push_back(objp); imgpoints.push_back(corner_pts); } //cv::imshow("Image", frame); //cv::waitKey(0); } cv::destroyAllWindows(); cv::Mat cameraMatrix, distCoeffs, R, T; /* * Performing camera calibration by * passing the value of known 3D points (objpoints) * and corresponding pixel coordinates of the * detected corners (imgpoints) */ // 通过传递已知3D点(objpoints)的值和检测到的角点(imgpoints)的相应像素坐标来执行相机校准 cv::calibrateCamera(objpoints, imgpoints, cv::Size(gray.rows, gray.cols), cameraMatrix, distCoeffs, R, T); // 内参矩阵 std::cout << "cameraMatrix : " << cameraMatrix << std::endl; // 透镜畸变系数 std::cout << "distCoeffs : " << distCoeffs << std::endl; // rvecs std::cout << "Rotation vector : " << R << std::endl; // tvecs std::cout << "Translation vector : " << T << std::endl; return 0; }
分析原因,无非是代码错了、或者测试方法错误。
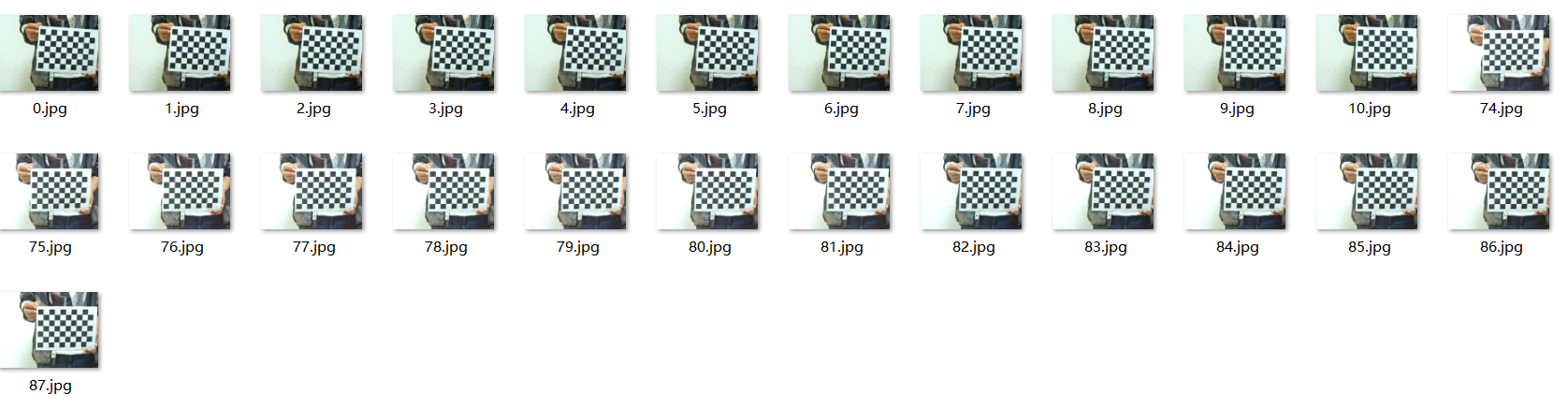
上图,是我的测试用图,很明显这些测试图的角度变换太小,位移太小。而下图,是其他人的测试图,变换比较大,位移也大。如果没有畸变模型,只是单一的DLT问题,我相信这是无所谓的,无需作大角度的变换。但是畸变模型是非线性模型,需要丰富的采样,保证多样性,不然就会发生过拟合现象。