Lecture07-Introduction to Geometry几何
显式的(explicit)几何表示方法:点云(point cloud)、多边形网格(polygon mesh)、细分(subdivision)…
隐式的(implicit)表示方法:等值面(level set)、代数曲面(algebraic surface)…
Implicit Surface 隐式的曲面
形如 \(f(x,y,z)=0\) 的形式给出。
- 找到哪些点在面上通常是困难的,但是判断一个点在哪里是比较简单的!
CSG-Constructive Solid Geometry(Implicit)构造刚体几何图形
集合运算跟逻辑运算是对应的,所以就可以用集合的交并补差这些运算,来处理图形。
Blending Distance Functions 融合距离函数
对于几何,不去描述表面,而是描述点到表面的最近距离。
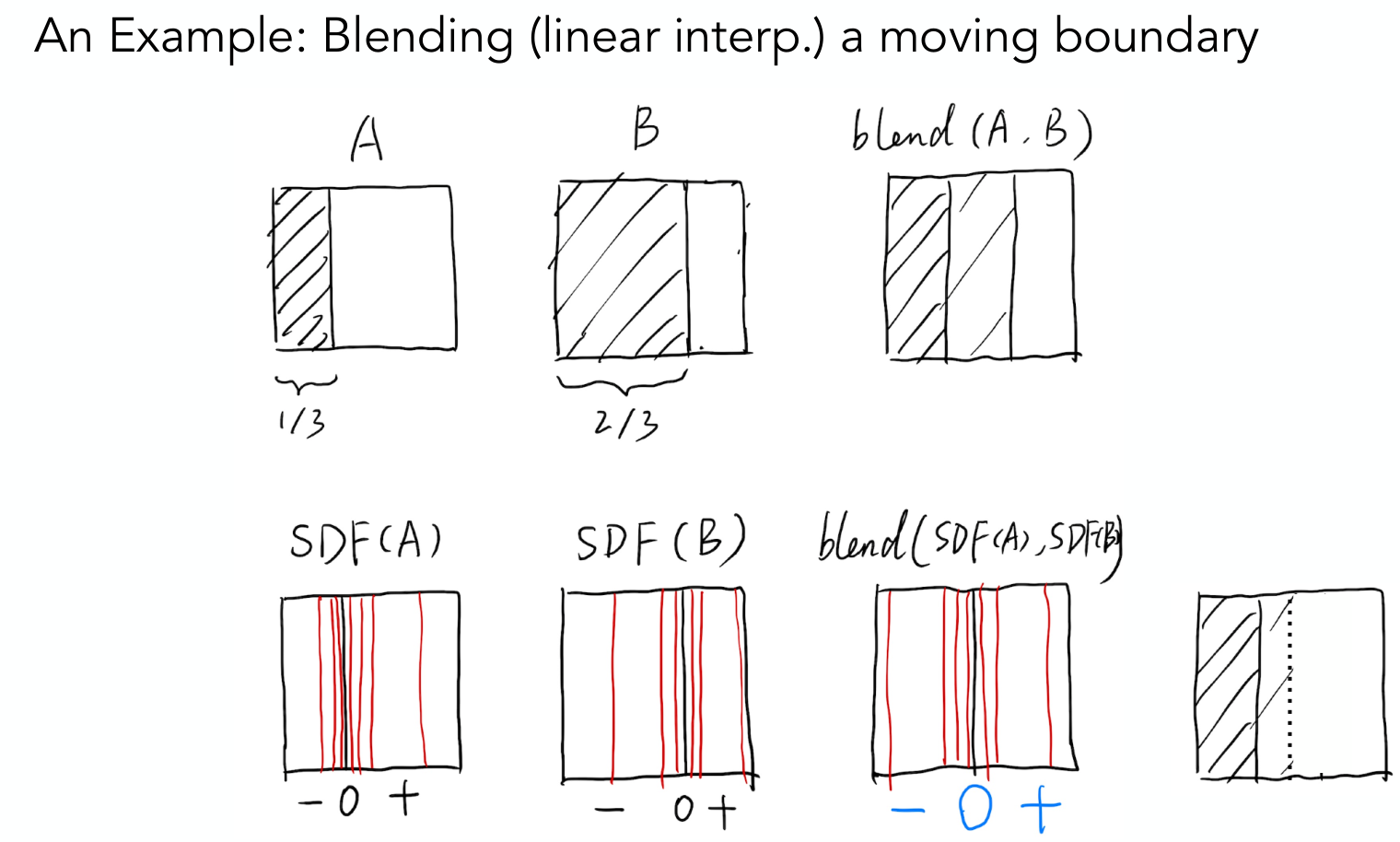
假设想要求出上图中,\(A\to B\) 的中间的运动状态,如果直接混合(blend),会得到(黑-灰-白)的三块,并不具有运动的信息。如果反过来,对横轴上每个点求SDF(Signed Distance Function),然后混合两个SDF,得到\(blend(SDF(A),SDF(B))\)。
Level Set Method 水平集方法
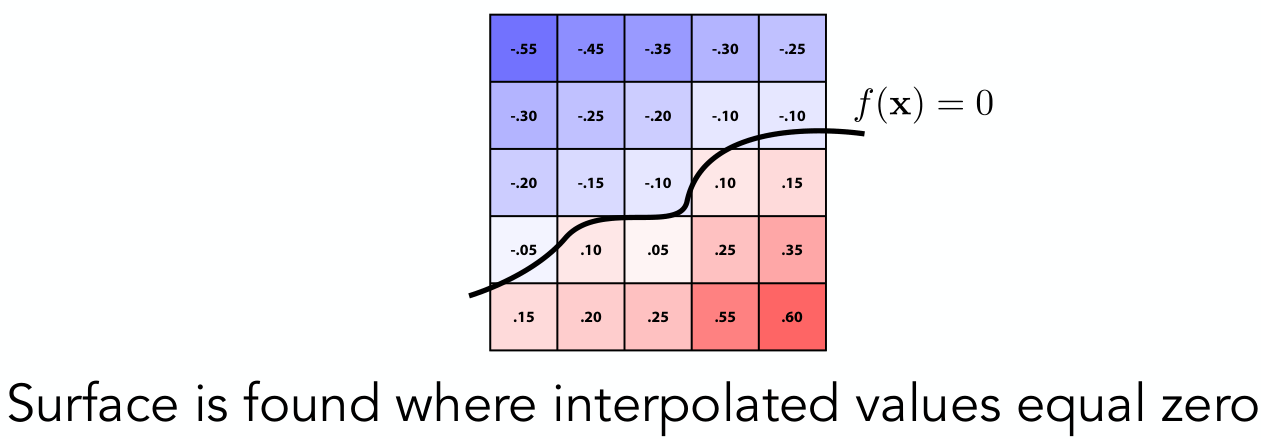
有了混合的距离函数,如何再恢复表面呢?把SDF=0的地方找出来,如果函数是隐式的,那就类似光栅化那样采样,然后用插值的方法求出等值面。
Fractal 分形
复杂的情况~在渲染的时候可能会引起强烈的走样。
Explicit Representation 显式的表示
- 找到哪些点在面上会变简单(比如参数方程的表示,只要跑遍所有参数的取值,也必须跑遍),但是判断一个点在哪里变难了!
所有点直接给出/通过参数坐标给出,比如课件上给了个 \(\mathbb{R}^2\to \mathbb {R^3}\) 的映射,把平面上的图形映射成马鞍面,又比如前面的轮胎面\((2-\sqrt{x^2+y^2})^2+z^2-1=0\),也可以改写成显示的 \(z=\pm \sqrt{1-(2-\sqrt{x^2+y^2})^2}\)。
接着就开始说极坐标表示点,上面提到的轮胎面还可以表示成 \(f(u,v)=((2+\cos u)\cos v,(2+\cos u)\sin v,\sin u)\),但是我们会发现,这样子的表示,就不太好判断一个点在内部还是外部了。
(补充)
Point Cloud 点云
用一系列的点 \((x,y,z)\) 表示,可以很容易表示各种几何图形,对于数据集比较大(比如一个3D空间的扫描)的情况非常有用,并且经常可以转化成多边形网格的表示。
Polygon Mesh 多边形网格
-
存储点和多边形
-
很容易做处理、模拟、自适应采样
-
更加复杂的数据结构
-
在图形学里更经常用的表示方法
Splines 样条曲线
样条(spline):一条连续的曲线,经过一系列给定的控制点,并且满足一定的连续性。
Cubic Hermite Interpolation 三次Hermite插值
- Nearest Neighbor Interpolation:\(x\) 处选取最近的 \(x_i\) 的函数值,函数不连续。
- Linear Interpolation:线性插值,函数连续,导数不连续。
- Cubic Hermite Interpolation(三次厄尔米特插值):可以让导数连续!
Power Basis 幂基
幂基(power basis):\(\mathcal {P}^d=[1,u,u^2,\dots,u^d]\),(注:这里幂基应当是一个行向量)很明显幂基在 $\R $ 上是线性无关的。
然后对于一个 \(\R [u]\) 中的元素,可以写成幂基的形式: \(x(u)=\sum_{i=0}^ d c_i u^i=\mathcal {C\cdot P}^d\)。
Useful Properties of a Basis 基的一些有用性质
这部分在课件里放在贝塞尔曲线,但我感觉提上来比较好。
Convex Hull property 凸包性质
- 凸包性质指的是:所有曲线上的点都落在控制点的凸包内。
- 贝塞尔曲线具有这种性质。
- 基满足凸包性质,若:
- 基函数的和为1,即: \(\sum b_i (u)=1(\forall u\in \Omega)\)
- 基函数非负:\(b_i (u)\geq 0 (\forall u\in \Omega,i=0,\dots,n)\)
Invariance 不变性
这里特指:对曲线做某个变换=对控制点做变换,再绘制曲线
即:
- 贝塞尔曲线对仿射变换具有不变性,但对透视变换不具有不变性,即:
这条性质感觉得通过Bernstein多项式来写?(不知道有没有更直接的方法,直接乘矩阵肯定是不能交换的)
Local Support 局部支撑
改变一个控制点,不会改变整个曲线。
Some Differential Geometry 一些微分几何
一条曲线在某方向的切线可以写成 \(t(u)=\frac{\partial x}{\partial u}|_u\),对于一个曲面则可以写\(t_u(u,v)=\frac{\partial x}{\partial u}|_{u,v}\) 和 \(t_v(u,v)=\frac{\partial x}{\partial v}|_{u,v}\),综合起来,可以写出曲面的单位法向量:
当然也有一些退化情况(比如 \(||t_u \times t_v||=0\) 或者 \(\partial x/\partial u=0\) 的情况。
好了说了这么多,其实不知道他这页PPT放了有什么意义…
Specifying a Curve 特定曲线
给了一些希望有的限制,如何确定三次幂基的系数(这句话有点绕,其实就是确定一个三次曲线的系数)?
即:已知 \(x(u_0)=x_0,x(u_1)=x_1, x'(u_0)=d_0,x'(u_1)=d_1\),如何确定三次函数 \(x(u)=c_0+c_1u+c_2 u^2 +c_3 u^3\)?
好,首先:
不妨假设 \(u_0=0,u_1=1\),那么有:
写成矩阵,即:
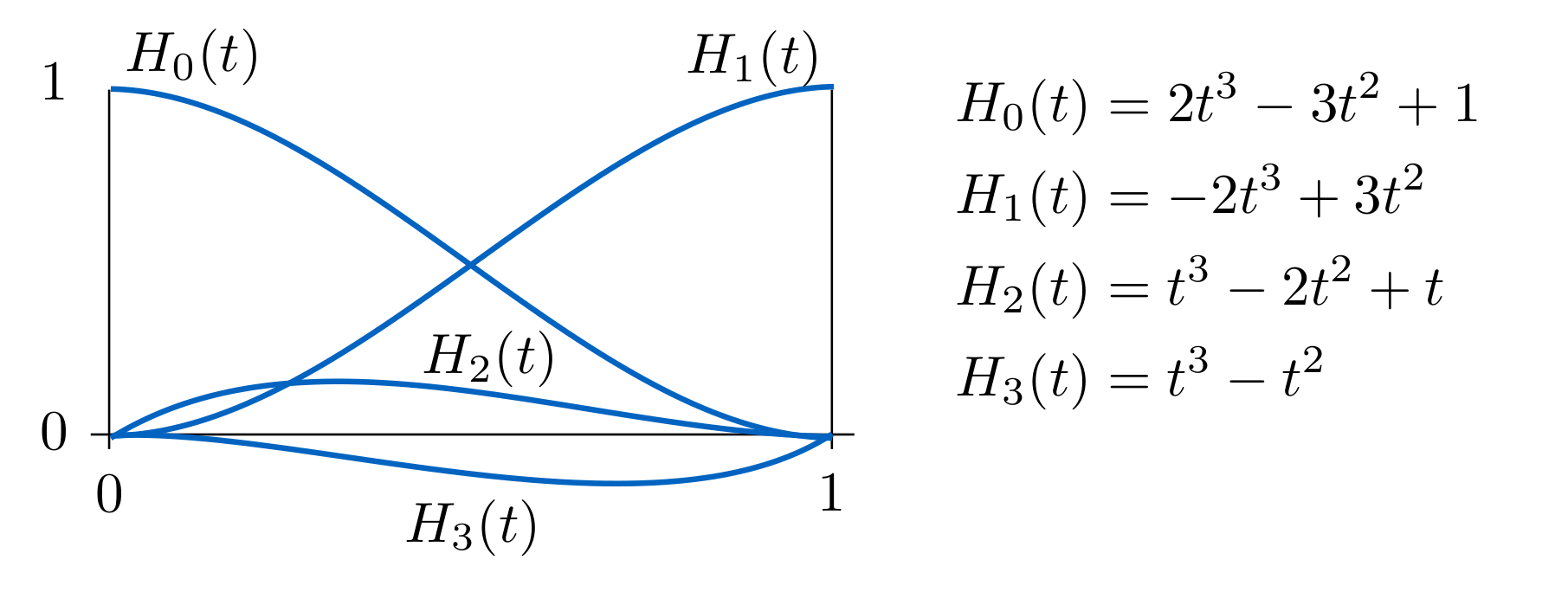
我们把左边的列向量 \(c=(c_0,c_1,c_2,c_3)^T\) 叫做系数(coefficient)向量,右边 \(h=(x_0,x_1,d_0,d_1)^T\) 一般叫做控制点,以及矩阵记为 \(B\) ,那么就是 \(B\cdot c=h\),即 我们想要的系数 \(c=B^{-1}h\),因为逆矩阵更常用,所以不如起个名字叫 \(\beta_H=B^{-1}\)。(H就是Hermite的首字母, \(\beta _H\) 则叫做Hermite基矩阵)
注:Hermite基矩阵:
此时任意一点
如果控制点发生变化,其实幂基、Hermite基矩阵都不会改变,所以 \(\mathcal{P}^3 (u)\cdot \beta_H\) 的结果是固定的!这一部分(最终其实是一个行向量)就叫 Hermite 基函数(因为是关于自变量 \(u\) 的函数)
综上所述,三次Hermite插值是这样一个过程:输入端点函数值、导数值,输出一个三次多项式,最终的结果就是Hermite基的带权和(其实就是矩阵乘完的结果啦)!
得到的Hermite基函数(的各个分量):
Q:为什么不用更高阶的多项式?
A:1、高阶多项式更不稳定,容易摆动。2、希望编辑后,能保持一些局部的性质(局部不要变化太大)3、开销大。
Catmull-Rom 插值
输入一些点,输出C1连续的经过所有插值点的样条。
导数的确定方式: \(i\) 处的导数值 \(f'(x_i)=\frac{f(x_{i+1})-f(x_{i-1})}{x_{i+1}-x_{i-1}}\),(注:这里的上一个和下一个应该是循环的)
是一种逐段的(piecewise)三次曲线,并且非常容易推广到对 \(n\) 维空间的几个点进行插值。
确定了导数之后,剩下的内容其实和三次Hermite插值一样,上面的 \(\vec h=[p_1,p_2,\frac{1}{2}(p_2-p_0),\frac{1}{2}(p_3-p_1)]\),那么
中间两个矩阵的结果就叫 \(\beta_{CR}=\beta_H\cdot \beta_{CR\to H}\)。
Bézier Curve 贝塞尔曲线
Evaluating Bézier Curves——Matrix Formula 矩阵表示
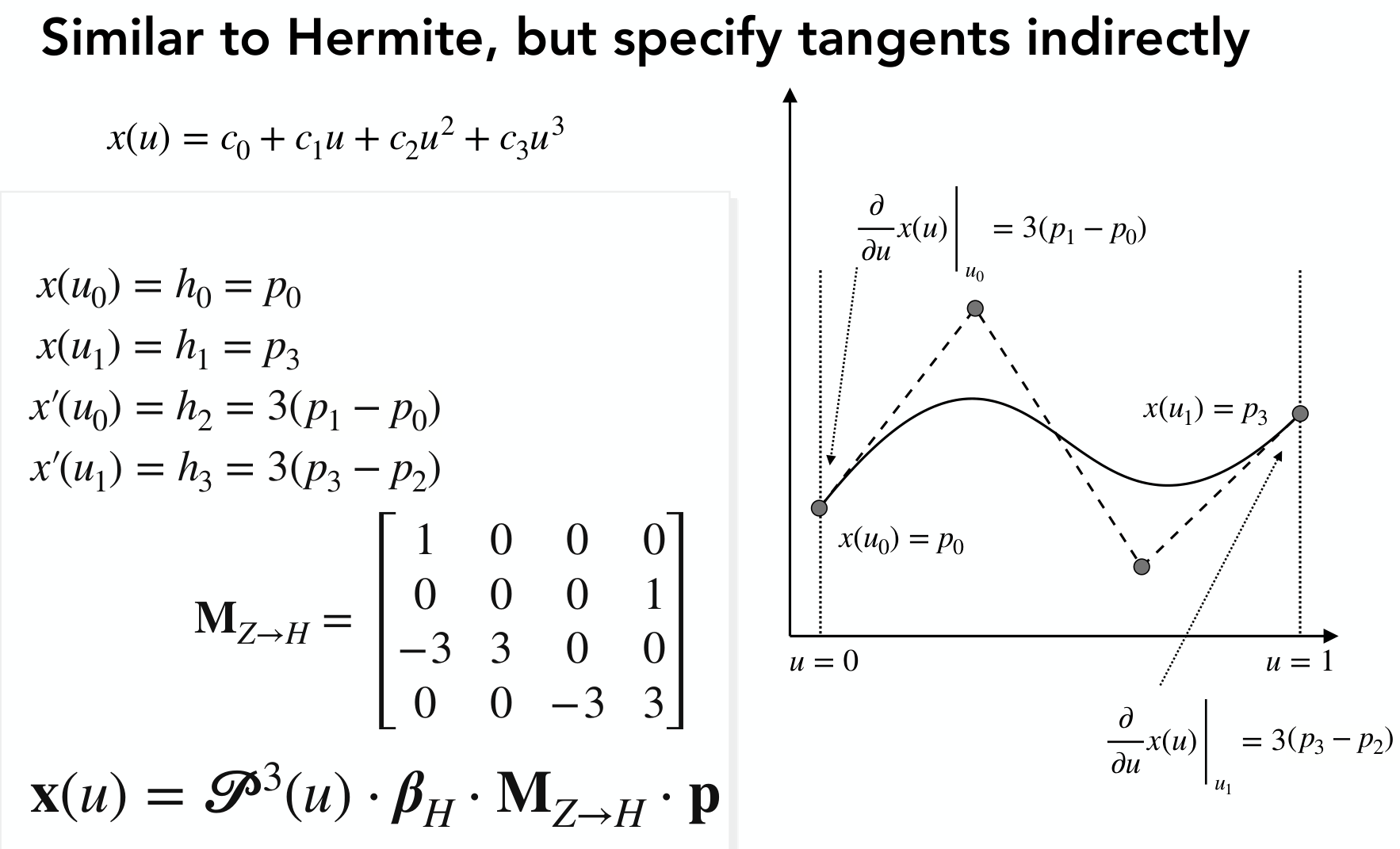
和之前的Hermite、Catmull-Rom相比,还是改了个切线的定义方式——所有的控制点都是空间中的点,没有切线,而是让左右两个端点处的切线,恰好是连线(虽然这里有个系数 \(3\) ,对应着后面的Bernstein多项式的系数)
然后也类似有一个矩阵 \(\beta_Z=\beta_H\cdot M_{Z\to H}\),
可以得到一个基函数的图像:
Evaluating Bézier Curves——De Casteljau Algorithm
对于 \(n\) 个控制点,和某个时间 \(t\in[0,1]\) , 跑 \(n-1\) 次循环。假设当前的控制点是 \(b_0,\dots,b_k\) ,则取 \(b_i'=(1-t)\cdot b_i+t\cdot b_{i+1}\)——这一步就是所谓的线性插值(lerp),直到最后只剩下一个点。
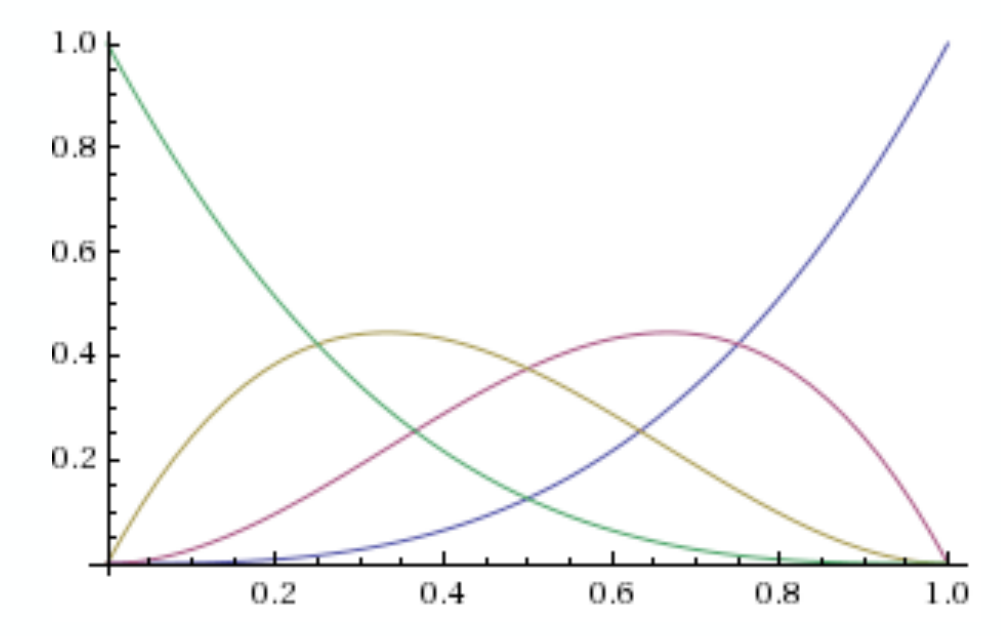
Evaluating Bézier Curves——Bernstein Polynomial
贝塞尔曲线迭代 \(n\) 次的结果(一个点)为:
注意, \(\vec b,\vec b_j\) 都是某维空间的向量, \(B_j^n (t)=\binom{n}{j} t^j (1-t)^{n-j}\) 叫做伯恩斯坦多项式,是标量。
\(b_0,\dots b_n\) 是贝塞尔曲线控制点。
那么特别地,对于一个三次贝塞尔曲线,有:
系数 3 就在这里。
Properties of Bézier Curve 贝塞尔曲线的性质
- 插值端点:\(b(0)=b_0,b(1)=b_n\)
- 切线端点:对于3次贝塞尔曲线(4个控制点),\(b'(0),b'(1)\)恰是切线。
- 仿射变换不变性:贝塞尔曲线做仿射变换=控制点做仿射变换,再绘制贝塞尔曲线。
- 凸包性质:绘制的图形一定在控制点构成的凸包内部。
- 良好的表现:局部控制(加入点时?)
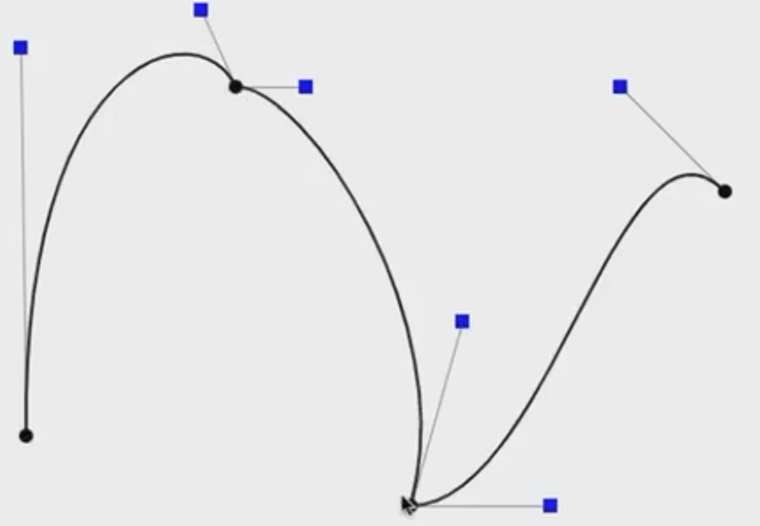
Piecewise Bézier Curves 逐段贝塞尔曲线
普通的贝塞尔曲线有个不好的地方,次数一旦高了,就不好通过控制点控制!
所以就有了逐段贝塞尔曲线——把很多段低阶的贝塞尔曲线,按顺序拼接起来,应用非常广泛(比如Photoshop的钢笔工具,绘制路径,很多矢量图的存储方式也是用这种曲线)
然后就是注意一点差异,我们平常在Photoshop里的钢笔工具是比较规范的,实际上的逐段贝塞尔曲线,可能不是C1连续的:
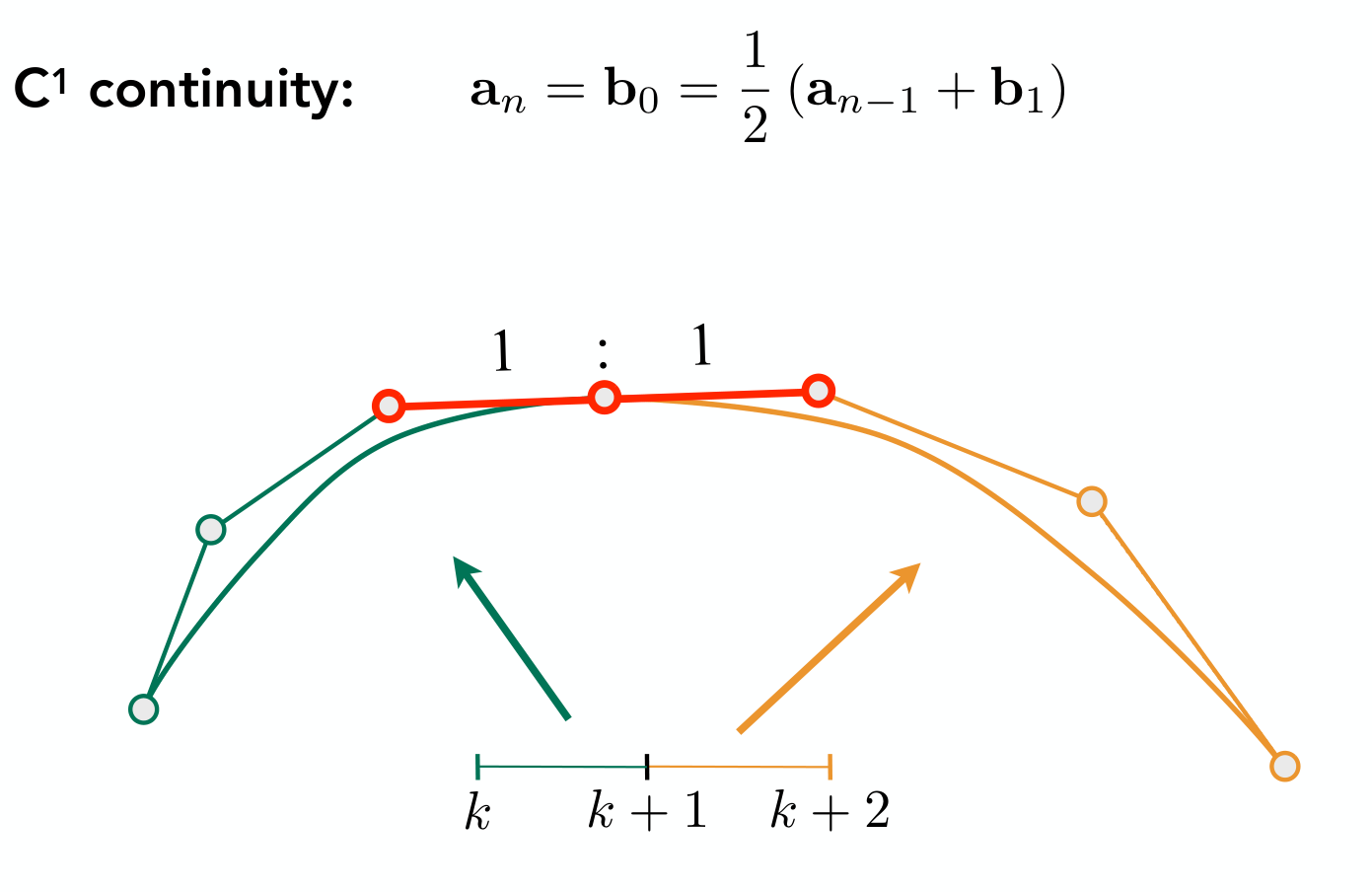
想象下面两段3阶贝塞尔曲线拼接起来,\(C^0\) 连续当且仅当 \(a_n =b_0\), $C^1 $连续还需切线连续,这里通常还会要求相等,即 \(a_n-a_{n-1}=b_1-b_0\),又因为 \(C^0\) 连续有 \(a_n=b_0\),所以即 \(a_n=b_0=\frac{1}{2}(a_{n-1}+b_1)\)。
Bézier Surfaces 贝塞尔曲面
通常是用 \([0,1]^2\) 的参数来刻画曲面的。
Method 1: Separable 1D de Casteljau Algorithm
方法1就是说,对于 \((u,v)\) 分开地用Casteljau算法,可见复杂度之高x
Method 2: Algebraic Evaluation
方法2是代数方法,推广一下上面的Bernstein多项式的写法:
课件上管这玩意叫张量积(Tensor product),给我吓得不轻。
Method 3: Linear Algebra
其实三个方法思路都一样,都是对两个方向进行线性插值。
方法3还是考虑前的形式,\(x(u,v)=\mathcal{P}^3(u) \cdot \beta_Z\cdot [p_0,p_1,p_2,p_3]^T\),只不过这里
最后写出来:
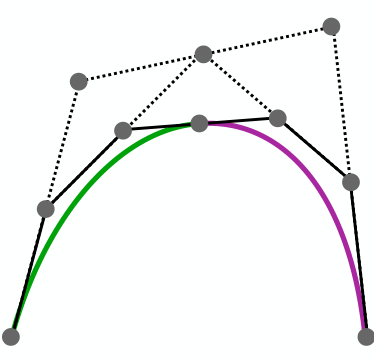
Method 4: Bézier Subdivision
方法4和之前的都不太一样!切入点应该是考虑贝塞尔曲线的凸包性质,进一步考虑找到一个合适的中点——即参数 \(t=1/2\) 对应的点,把控制点一分为二,连同中间过程的控制点,一起递归地处理,每次范围缩小一半,最后对于很小的地方直接用凸包替代曲线(?):
这里 \(H_{Z1}=\beta_Z^{-1}S_1\beta_Z\) 是一个下三角矩阵。
类似地,另一半也可以写成 \(x(u)=[1,u,u^2,u^3]\cdot \beta_Z \cdot P_2\) 的形式,\(P_2=H_{Z2}P\)。
Piecewise Bézier Surfaces逐段贝塞尔曲面
\(C^0\) 连续就是边界连续,\(C^1\)连续直接要求共线了,这个感觉没什么好说。