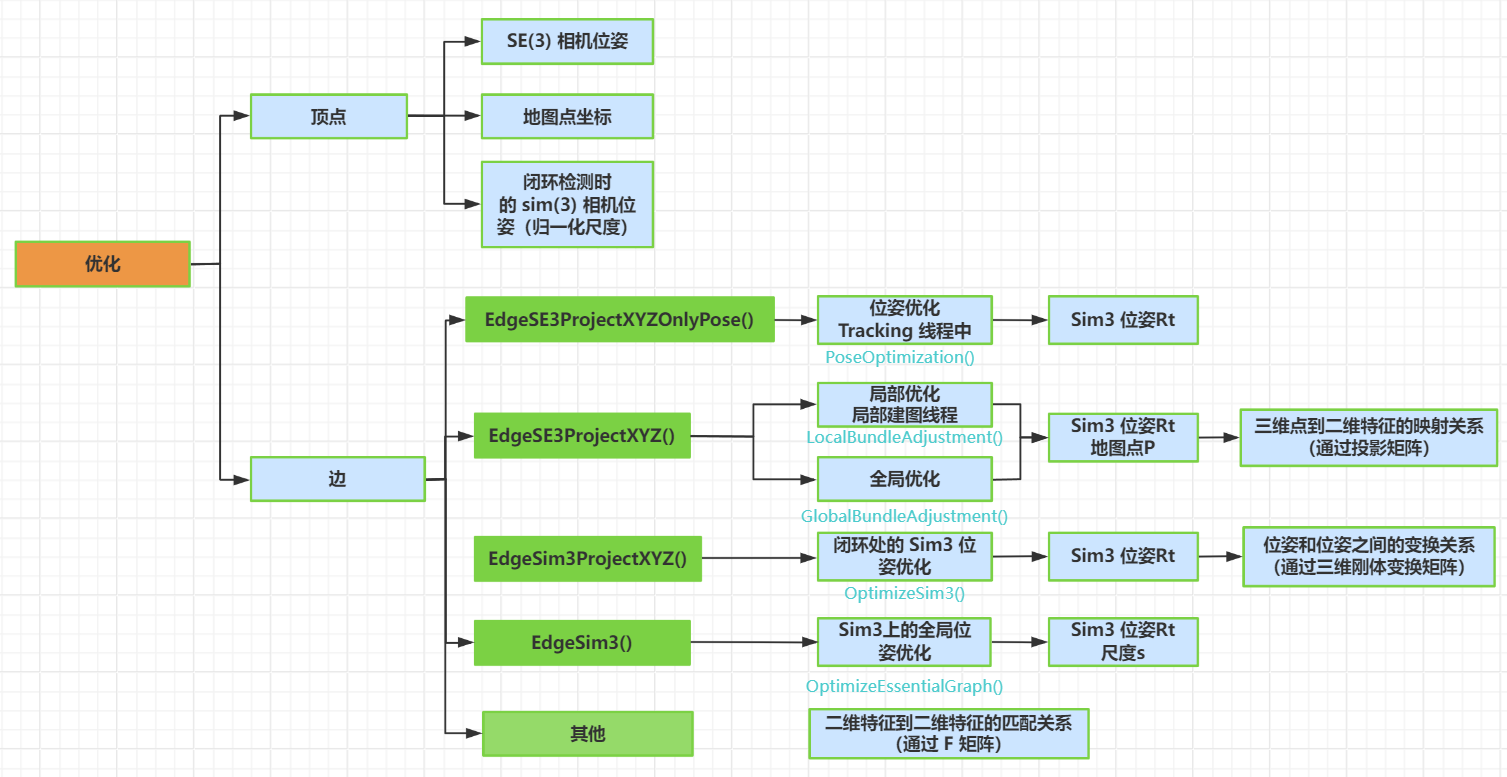

一共三种边
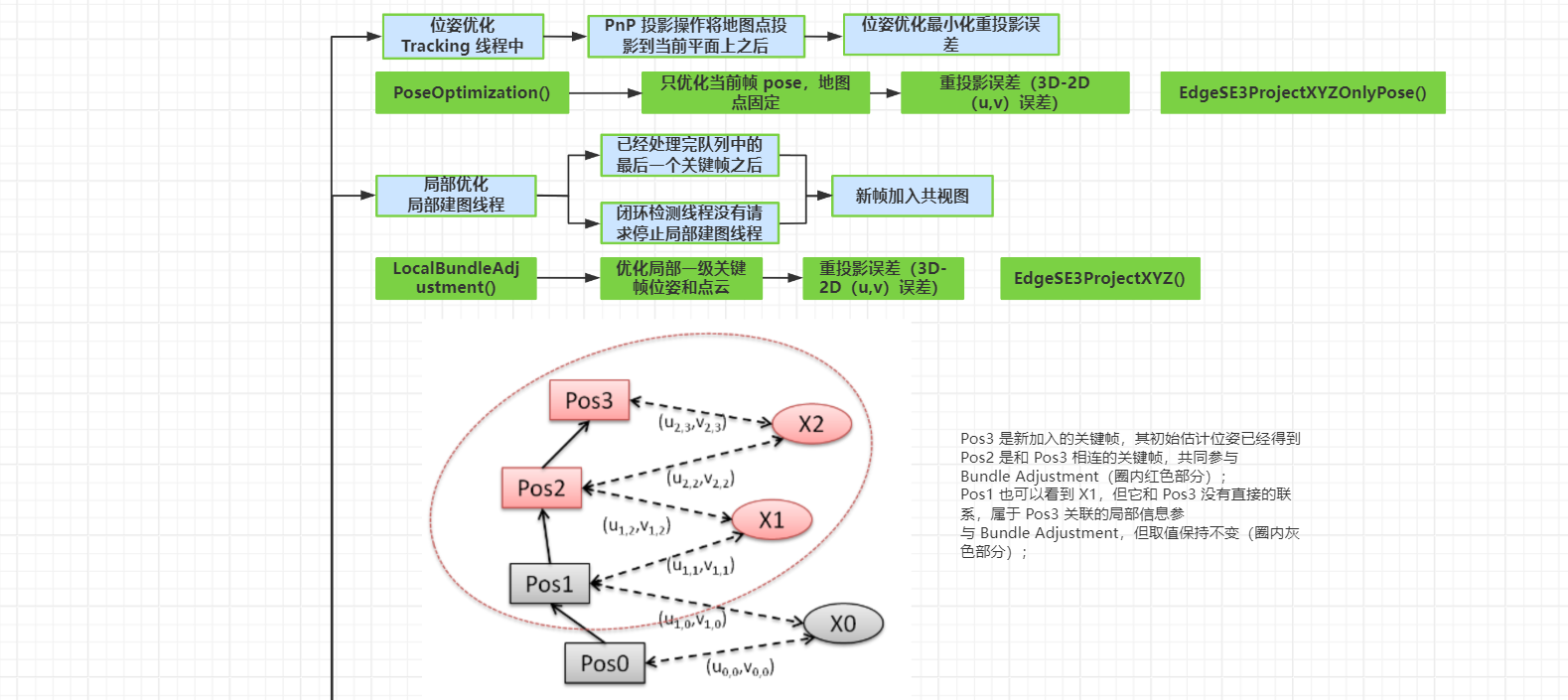
EdgeSE3ProjectXYZOnlyPose()
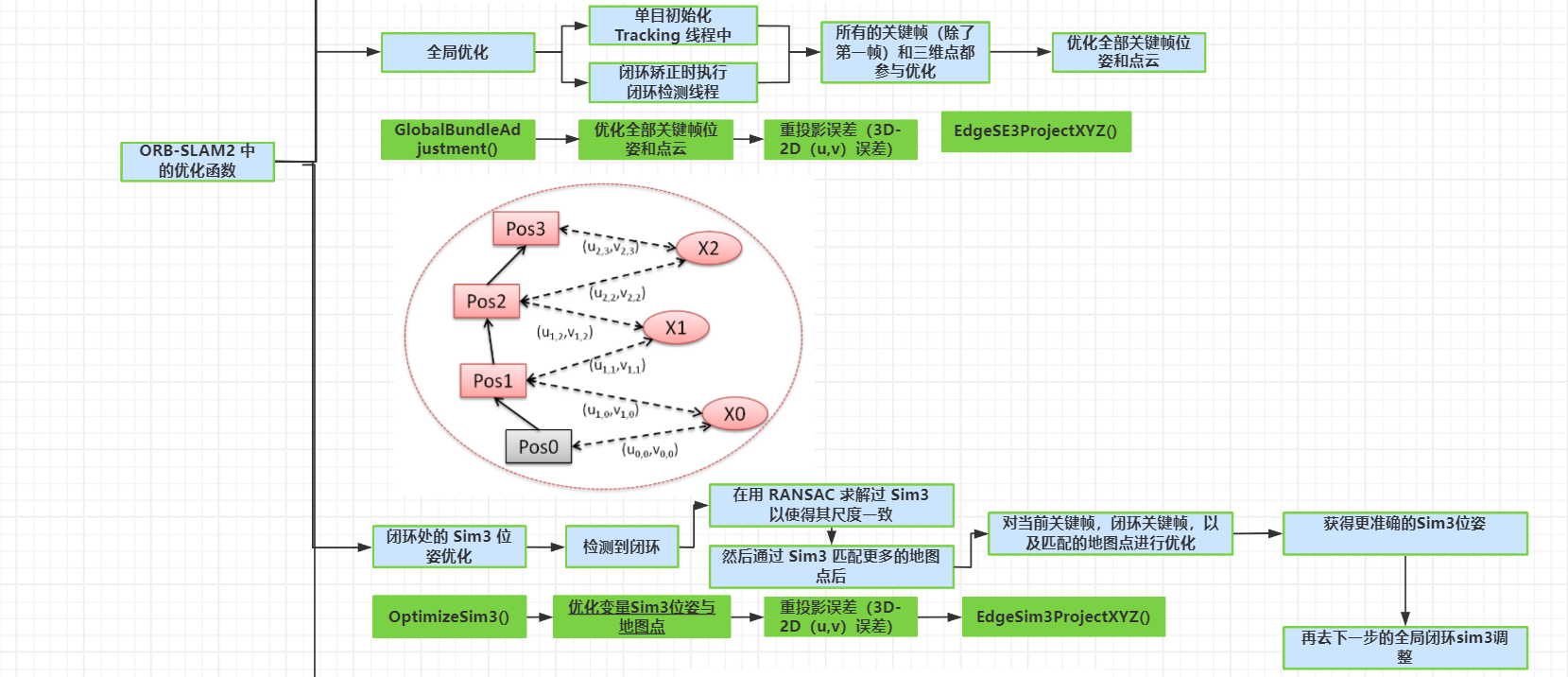
EdgeSE3ProjectXYZ()
// g2o - General Graph Optimization
// Added EdgeStereoSE3ProjectXYZ (project using focal_length in x,y directions)
// Added EdgeSE3ProjectXYZOnlyPose (unary edge to optimize only the camera pose)
// Added EdgeStereoSE3ProjectXYZOnlyPose (unary edge to optimize only the camera pose)
#ifndef G2O_SIX_DOF_TYPES_EXPMAP
#define G2O_SIX_DOF_TYPES_EXPMAP
#include "../core/base_vertex.h"
#include "../core/base_binary_edge.h"
#include "../core/base_unary_edge.h"
#include "se3_ops.h"
#include "se3quat.h"
#include "types_sba.h"
#include <Eigen/Geometry>
namespace g2o {
namespace types_six_dof_expmap {
void init();
}
using namespace Eigen;
typedef Matrix<double, 6, 6> Matrix6d;
class VertexSE3Expmap : public BaseVertex<6, SE3Quat>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSE3Expmap();
bool read(std::istream& is);
bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate = SE3Quat();
}
virtual void oplusImpl(const double* update_) {
Eigen::Map<const Vector6d> update(update_);
setEstimate(SE3Quat::exp(update)*estimate());
}
};
class EdgeSE3ProjectXYZ: public BaseBinaryEdge<2, Vector2d, VertexSBAPointXYZ, VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeSE3ProjectXYZ();
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexSBAPointXYZ* v2 = static_cast<const VertexSBAPointXYZ*>(_vertices[0]);
Vector2d obs(_measurement);
_error = obs-cam_project(v1->estimate().map(v2->estimate()));
}
bool isDepthPositive() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexSBAPointXYZ* v2 = static_cast<const VertexSBAPointXYZ*>(_vertices[0]);
return (v1->estimate().map(v2->estimate()))(2)>0.0;
}
virtual void linearizeOplus();
Vector2d cam_project(const Vector3d & trans_xyz) const;
double fx, fy, cx, cy;
};
class EdgeStereoSE3ProjectXYZ: public BaseBinaryEdge<3, Vector3d, VertexSBAPointXYZ, VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeStereoSE3ProjectXYZ();
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexSBAPointXYZ* v2 = static_cast<const VertexSBAPointXYZ*>(_vertices[0]);
Vector3d obs(_measurement);
_error = obs - cam_project(v1->estimate().map(v2->estimate()),bf);
}
bool isDepthPositive() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexSBAPointXYZ* v2 = static_cast<const VertexSBAPointXYZ*>(_vertices[0]);
return (v1->estimate().map(v2->estimate()))(2)>0.0;
}
virtual void linearizeOplus();
Vector3d cam_project(const Vector3d & trans_xyz, const float &bf) const;
double fx, fy, cx, cy, bf;
};
class EdgeSE3ProjectXYZOnlyPose: public BaseUnaryEdge<2, Vector2d, VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeSE3ProjectXYZOnlyPose(){}
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
Vector2d obs(_measurement);
_error = obs-cam_project(v1->estimate().map(Xw));
}
bool isDepthPositive() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
return (v1->estimate().map(Xw))(2)>0.0;
}
virtual void linearizeOplus();
Vector2d cam_project(const Vector3d & trans_xyz) const;
Vector3d Xw;
double fx, fy, cx, cy;
};
class EdgeStereoSE3ProjectXYZOnlyPose: public BaseUnaryEdge<3, Vector3d, VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeStereoSE3ProjectXYZOnlyPose(){}
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
Vector3d obs(_measurement);
_error = obs - cam_project(v1->estimate().map(Xw));
}
bool isDepthPositive() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
return (v1->estimate().map(Xw))(2)>0.0;
}
virtual void linearizeOplus();
Vector3d cam_project(const Vector3d & trans_xyz) const;
Vector3d Xw;
double fx, fy, cx, cy, bf;
};
} // end namespace
#endif