1.算法描述
BP(Back Propagation)神经网络,其本质是一种基于误差反馈传播的神经网络算法。从结构上讲,BP神经网络是由一个信息的正向传播网络和一个误差的反向传播网络两个模块构成。BP神经网络的结构如下图所示:
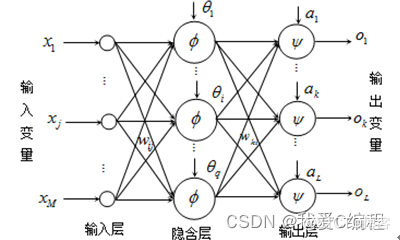
从图1的结构可知,BP神经网络主要由输入层,隐含层以及输出层三个部分构成。来自外界的信息通过输入层传输进入到隐含层进行处理,并由输出层输出处理结果。当BP神经网络的输出结果和其期望结果之间的误差较大的时候,则进入反向传播阶段,并进行进行审计网络权值的修正,直到输出结果和期望结果误差满足一定条件为止。
在BP神经网络中,隐含层数量对神经网络的性能有着至关重要的影响,如果隐含层数量过多,会大大增加BP神经网络的内部结构的复杂度,从而降低学习效率,增加训练时间;如果隐含层数量过少,则无法精确获得训练输入数据和输出结果之间的内在规律,增加预测误差。因此,选择合适的隐含层个数具有十分重要的意义。由于隐含层个数的设置没有明确的理论可以计算,通常情况下,采用逐次分析的方法获得,即通过对不同隐含层所对应的神经网络进行预测误差的仿真分析,选择误差最小情况下所对应的隐含层个数。
学习率,即网络权值得更新速度,当学习率较大的时候,网络权值的更新速度快,当网络稳定性会下降;当学习率较小的时候,网络权值的更新速度慢,网络较为稳定。这里选择BP神经网络的学习率方式参考上一章节隐含层的选择方式,即通过对比不同学习率的网络训练误差,选择性能较优的学习率。
BP神经网络的初始网络权值对网络训练的效率以及预测性能有着较大的影响,通常情况下,采用随机生成[-1,1]之间的随机数作为BP神经网络的初始权值。
本文,通过matlab的BP神经网络工具箱函数newff来构建BP神经网络,通过newff函数构建BP网络,其主要步骤如下:
第一,BP神经网络初始化后,其matlab程序如下:
net = newff(traindata, trainaim, HiddenNum);
其中traindata表示训练数据,trainaim表示训练目标,HiddenNum表示BP神经网络隐含层个数,net表示BP神经网络模型函数。
第二,BP神经网络参数设置,其matlab程序所示:
设置学习率,其matlab程序为 net.trainParam.lr = 0.25;
设置训练误差目标,其matlab程序为net.trainParam.goal = 1e-8;
设置神经网络训练次数,其matlab程序为net.trainParam.epochs = 200;
第三,BP神经网络的训练,其matlab程序所示:
net = train(net,train_data,train_aim);
这里通过train函数对神经网络net进行训练,得到训练后的BP神经网络模型。
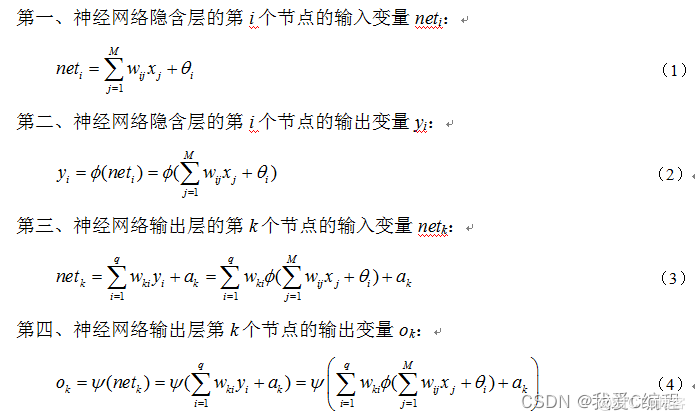
其中,信号的前向传播过程的主要步骤如下:

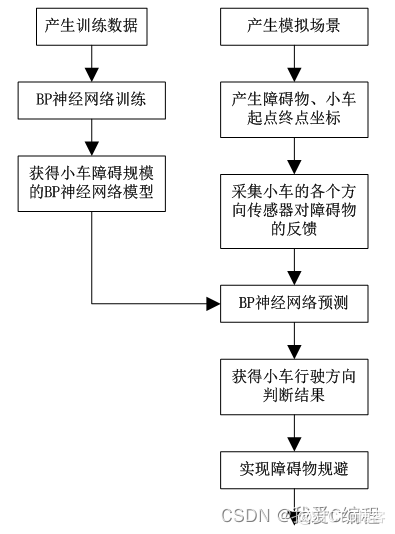
算法流程:
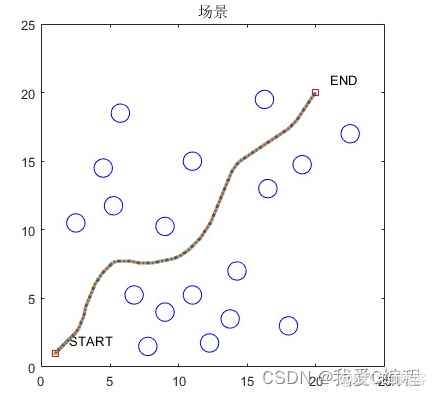
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
for time = 1:TIME
time
%计算四个输入
if time <= 3
x(:,time)= min(x(:,time),xmax);
x(:,time)= max(x(:,time),xmin);
Xs(time) = X_start;
Ys(time) = Y_start;
Theta = atan((Y_end-Y_start)/(X_end-X_start));
else
x(:,time)= min(x(:,time),xmax);
x(:,time)= max(x(:,time),xmin);
%计算alpha,机器人运动方向与目标方向之间的夹角
%计算alpha,机器人运动方向与目标方向之间的夹角
if X_end-Xs(time-1) == 0
tmps1 = inf;
else
tmps1 =(Y_end-Ys(time-1))/(X_end-Xs(time-1));
end
if Xs(time-1)-Xs(time-2) == 0
tmps2 = inf;
else
tmps2 =(Ys(time-1)-Ys(time-2))/(Xs(time-1)-Xs(time-2));
end
%目标方向 %运动方向
alpha = atan(tmps1) - atan(tmps2);
%先计算障碍物和机器人的距离,然后将这些距离划分为四类,dr,d,dl和反方向的,如果没有,那么认为距离为inf
dr = [];
dl = [];
d = [];
vdr = [];
vdl = [];
vd = [];
for kk = 1:N
%计算距离,障碍物和小车当前位置的间距
dist(kk) = sqrt((xobstacle(kk)-Xs(time-1))^2 + (yobstacle(kk)-Ys(time-1))^2)-R(kk);
if xobstacle(kk)-Xs(time-1) == 0
vdist(kk) = 1;
else
vdist(kk) = sign((yobstacle(kk)-Ys(time-1))/(xobstacle(kk)-Xs(time-1)));
end
if dist(kk)>0
%计算各个距离和机器人运动方向的夹角
if xobstacle(kk)-Xs(time-1) == 0
tmps3 = inf;
else
tmps3 =(yobstacle(kk)-Ys(time-1))/(xobstacle(kk)-Xs(time-1));
end
Beta(kk) = (atan(tmps3))*180/pi;
%根据角度差,分析哪些是dr,d,dl和反方向
%说明这个障碍物在运动方向的右边
if Beta(kk) > 15 & Beta(kk) <= 75
dr = [dr,dist(kk)];
dl = dl;
d = d;
vdr = [vdr,vdist(kk)];
vdl = vdl;
vd = vd;
end
%说明这个障碍物在运动方向的左边边
if Beta(kk) < -15 & Beta(kk) >= -75
dr = dr;
dl = [dl,dist(kk)];
d = d;
vdr = vdr;
vdl = [vdl,vdist(kk)];
vd = vd;
end
%说明这个障碍物在运动方向的前边
if Beta(kk) <= 15 & Beta(kk) >= -15
dr = dr;
dl = dl;
d = [d,dist(kk)];
vdr = vdr;
vdl = vdl;
vd = [vd,vdist(kk)];
end
end
end
for m=1:Ns
xs(:,m) = [x(1,time-1) + Sense_radius*cos(Jd(m,1));
x(2,time-1) + Sense_radius*sin(Jd(m,1))];
G1(m,1) = func_obstacle(xs(:,m),xobstacle,yobstacle);
G2(m,1) = func_goal(xs(:,m),Pend);
G3(m,1) = G1(m,1) + G2(m,1);
end
[val,bestone]=min(G3);
%如果某个方向有多个障碍物,那么选择最近的那个
%如果某个方向的距离集合为空集合,那么说明这个方向的障碍物为无穷远,直接赋值一个较大值
dr_in = min(dr);
if isempty(dr) == 1
dr_in = 1e20;
end
d_in = min(d);
if isempty(d) == 1
d_in = 1e20;
end
dl_in = min(dl);
if isempty(dl) == 1
dl_in = 1e20;
end
%代入到BP神经网络的四个变量
%调用BP神经网络的模型
YOUT = func_nn_test(dr_in,d_in,dl_in,alpha,net);
%计算速度和方向
DELTA_Theta = YOUT/10;
V = YOUT;
%更新小车坐标
x(:,time) =[x(1,time-1)+lambda*cos(Jd(bestone,1));
x(2,time-1)+lambda*sin(Jd(bestone,1))];
Deltalambda = V;
Deltatheta = DELTA_Theta;
%更新小车坐标
x(:,time) =[x(1,time)+Deltalambda*cos(Jd(bestone,1)+Deltatheta);
x(2,time)+Deltalambda*sin(Jd(bestone,1)+Deltatheta)];
%更新坐标
Xs(time) = x(1,time);
Ys(time) = x(2,time);
Tes = [Tes,Jd(bestone,1)+Deltatheta];
Vs = [Vs,Deltalambda];
end
%画图
plot(x(1,time),x(2,time),'.')
hold on
drawnow;
if sqrt((Xs(time)-X_end)^2+(Ys(time)-Y_end)^2)<0.2
break;
end
end