控制器 算法 项目march
PFCL201C 10KN张力控制器
PFCL201C 10KN张力控制器 PFCL201C 10KN张力控制器 PLC程序的程序结构可以从流程图中理解。但是这里有一些编写程序的注意事项。 程序结构: 人们应该尝试获得一个结构化的程序,其中包含处理特定操作区域的明确部分。通过采用这种方法,开发的程序可靠且易于理解。这些部分可以大致分为以 ......
electron-vue3的项目怎么引用element-plus的icon图标
在electron结合vue3的项目中,引入element-plus的icon可以根据官网的步骤: 先安装icons-vue npm install @element-plus/icons-vue 注册所有图标,在main.js/main.ts 1 import * as ElementPlusIc ......
解决Vue项目在刷新页面时出现404错误的问题
在Vue项目中,当在本地运行时,使用Vue Router进行路由跳转时,页面的刷新是由前端路由控制的,而不会发送实际的HTTP请求。然而,当将Vue项目发布到服务器上时,刷新页面可能会导致出现404错误。本文将介绍两种常见的解决方案。 ......
vue项目工程化入门
- mac电脑  # 1、项目创建 - 使用Vue-cli来完成 ## 1.1、N ......
Window下ES启动控制台中文乱码问题
找到es安装目录config下的jvm.options文件,在空白处加上这一行: ` -Dfile.encoding=GBK`  这里使用 `koa2` 做为演示项目,使用 `Dockerfile` 构建 `Docker` 镜 ......
深度学习—YOLO目标检测算法
一、整体流程介绍 二、数据准备 根据目标大小不同,考虑3种图像划分尺度,大中小; 而对锚框本身,有正、长、宽3种形态; Po有无中心坐标(0、1)、Bx、By、Bw、Bh,这里是5个特征值,再加上COCO数据集本身自带的80个类别; 故对于每个图像块均构造一个对应的标签列向量y,(5+80)* 3 ......
创建react项目
react官网 https://reactjs.bootcss.com/ 创建react项目 npx create-react-app my-app cd my-appnpm start 创建组件,jsx 如果你书写的标签代码与 return 语句不在同一行上,则必须将其用一对圆括号括起来 expo ......
算法学习笔记(24): 狄利克雷卷积和莫比乌斯反演
# 狄利克雷卷积和莫比乌斯反演 > 看了《组合数学》,再听了学长讲的……感觉三官被颠覆…… [TOC] ## 狄利克雷卷积 如此定义: $$ (f*g)(n) = \sum_{xy = n} f(x)g(y) $$ 或者可以写为 $$ (f * g)(n) = \sum_{d | n} f(d) g ......
深度学习—Faster R-CNN系列目标检测算法
〇、目标检测 1、定义:既包括回归问题(外接框顶点坐标回归也包括分类问题(识别每个检测框中的物体种类) 在深度学习中,目标检测就是在图像中自动生成确定物体/目标位置(定位目标), 及物体类别(目标识别)目标的位置的表示方法, 通常是目标的外边界的矩形框(或其他形式的框)的各项顶点。 2、基于深度学习 ......
1.3OpenDaylight SFC项目基础
# OpenDaylight SFC项目基础 ##### 任务目的 1、了解OpenDaylight SFC项目。 2、掌握手动配置SFC的基本操作。 ##### 任务环境 | 设备名称 | 软件环境(镜像) | 硬件环境 | | : | : | : | | 主机 | Ubuntu 14.04桌面版 ......
1.6Mininet流表应用实战2——控制器下发流表协议分析
# Mininet流表应用实战2——控制器下发流表协议分析 ##### 实验目的 1、理解OpenFlow交换机和控制器间的工作原理。 2、学会使用Wireshark抓包分析,熟悉了解OpenFlow协议。。 ##### 实验环境 Mininet流表应用实战2——控制器下发流表协议分析实验的拓扑如下 ......
【C#】基于JsonConvert解析Json数据 以 java控制台打印print,思路供参考
【C#】基于JsonConvert解析Json数据 https://blog.csdn.net/m0_37602827/article/details/128155186 1 解析字典 1)解析为 JObject private void ParseJson() { // 解析为JObject st ......
第三节 C#语言基本元素概览,初始类型、变量与方法,算法简介
视频链接:刘铁猛老师的《C#语言入门详解》 [https://www.youtube.com/watch?v=EgIbwCnQ680&list=PLZX6sKChTg8GQxnABqxYGX2zLs4Hfa4Ca](https://www.youtube.com/watch?v=EgIbwCnQ68 ......
MAUI移动应用 项目结构解释
# 项目结构 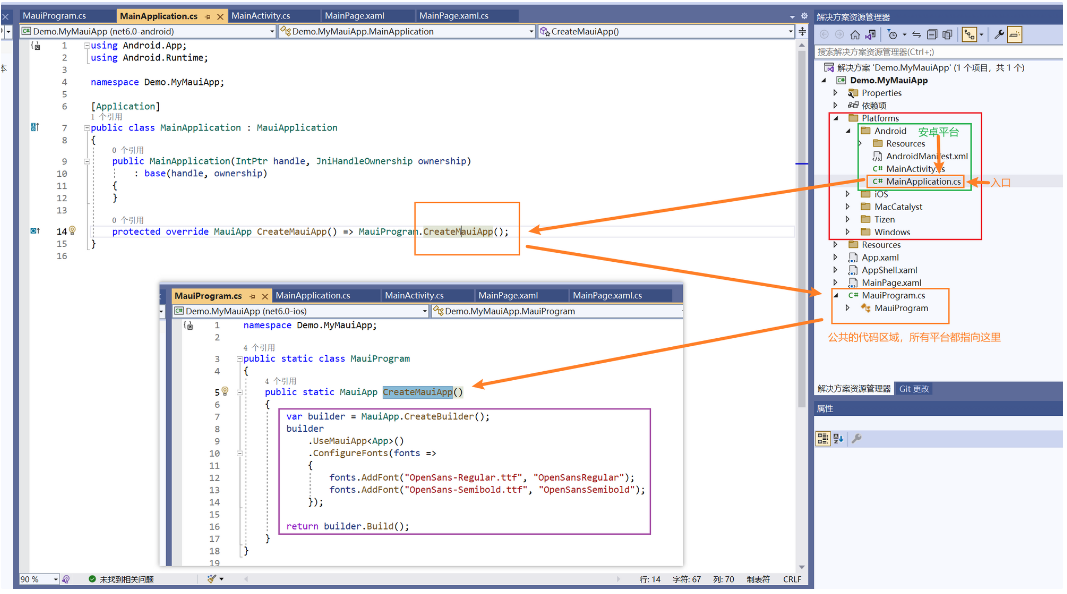 # 资源管理  # 1. 人工智能研究人员在过去几十年中学到的最重要的教训之一 ## 1.1. 看似智能的行为有可能从看似随机的 ......
深度学习降噪专题课:整体介绍降噪算法
大家好~本课程基于全连接和卷积神经网络,学习LBF等深度学习降噪算法,实现实时路径追踪渲染的降噪 本课程偏向于应用实现,主要介绍深度学习降噪算法的实现思路,演示实现的效果,给出实现的相关代码 线上课程资料: [本节课录像回放](https://www.bilibili.com/video/BV1No ......
算法学习day21二叉树part07-501、236、530
package LeetCode.Treepart07; import java.util.ArrayList; import java.util.HashMap; import java.util.List; import java.util.Map; import java.util.strea ......
算法学习day22二叉树part08-450、701、235
package LeetCode.Treepart08; public class DeleteNodeBST_450 { public TreeNode deleteNode(TreeNode root, int key) { root = delete(root,key); return roo ......
算法学习day23二叉树part09-538、108、669
package LeetCode.Treepart09; public class ConvertBSTGreaterTree_538 { int sum; public TreeNode convertBST(TreeNode root) { sum = 0; convertBST1(root); ......
算法学习day20二叉树part06-654、617、700、98
package LeetCode.Treepart06; /** * 654. 最大二叉树 * 给定一个不重复的整数数组nums 。最大二叉树可以用下面的算法从nums 递归地构建: * 创建一个根节点,其值为nums 中的最大值。 * 递归地在最大值左边的子数组前缀上构建左子树。 * 递归地在最大 ......
一个函数解决PHP不能在控制台打印的问题
长久以来PHP都只能在网页上打印数据,而不能像python和java这些编程语言一样,在控制台输出内容,这样在调试时候,很不方便。 https://blog.csdn.net/flyfreelyit/article/details/50737611 结合这篇文章 我们来谈谈到底怎么实现控制台打印 首 ......
算法学习day18二叉树part05-105、106、513、112、113
package LeetCode.Treepart05; import java.util.HashMap; import java.util.Map; public class ConstructBinaryTree_105 { Map<Integer, Integer> map; public ......
集合常用算法
```xml org.apache.commons commons-collections4 4.4 ``` 示例 ```java import org.apache.commons.collections4.CollectionUtils; import java.util.Arrays; imp ......
算法学习day17二叉树part04-110、257、404
package LeetCode.Treepart04; /** * 110. 平衡二叉树 * 给定一个二叉树,判断它是否是高度平衡的二叉树。 * 本题中,一棵高度平衡二叉树定义为: * 一个二叉树每个节点 的左右两个子树的高度差的绝对值不超过 1 。 * */ public class Balan ......
算法学习day16二叉树part03-222、104、559、111
package LeetCode.Treepart03; /** * 222. 完全二叉树的节点个数 * 给你一棵 完全二叉树 的根节点 root ,求出该树的节点个数。 * 完全二叉树 的定义如下:在完全二叉树中,除了最底层节点可能没填满外, * 其余每层节点数都达到最大值,并且最下面一层的节点都 ......
算法学习day15二叉树part02-102、226、101
package LeetCode.Treepart02; import java.util.ArrayList; import java.util.LinkedList; import java.util.List; import java.util.Queue; /** * 102. 二叉树的层序 ......