Adaptive Sparse Convolutional Networks with Global Context Enhancement for Faster Object Detection on Drone Images
* Authors: [[Bowei Du]], [[Yecheng Huang]], [[Jiaxin Chen]], [[Di Huang]]
初读印象
comment:: 提出了一种新型全局上下文增强自适应稀疏卷积网络(CEASC)。首先开发了一个上下文增强组归一化层(CE-GN),用全局上下文统计取代基于稀疏采样特征的统计,然后设计了一种自适应多层掩码策略,在不同尺度上生成最佳掩码比,以实现紧凑的前景覆盖,从而提高了准确性和效率。
Why
- 现有的研究热衷于设计复杂的模型,以在高分辨率无人机图像上达到微小目标的高精度,这在计算上很不划算的。
- 无人机配备的硬件往往受到资源限制,这对轻量级部署模型提出了快速推理和低延迟的迫切需求。
过去解决方案:
- 稀疏卷积:通过可学习Mask仅在稀疏采样的区域或通道上操作卷积来限制计算。但其结果在很大程度上取决于有意义区域的选择,无人机图像中,物体尺寸小,不足的mask会导致在背景上浪费计算资源。
What
上下文加强的稀疏卷积
稀疏卷积
给定 FPN 第 i 层的特征图 \(X_i ∈ R^{B×C×H×W}\),SC 采用由共享内核 \(W_{mask} ∈ R^{C×1×3×3}\) 组成的掩码网络。根据\(W_{mask}\) 对 \(X_i\)进行卷积,生成软特征\(S_i ∈ R^{B×1×H×W}\) ,再通过 Gumbel-Softmax 将其转化为掩码矩阵\(H_i∈ {\{0, 1\}}^{B×1×H×W}\) :

其中,\(g_1,g_2∈ R^{B×1×H×W}\) 表示两个随机噪声,σ 指 sigmoid 函数,τ 是 Gumbel-Softmax 中相应的温度参数。在推理过程中,只有掩码值为 1 的区域涉及卷积,从而降低了整体计算成本。
上下文增强
SC 只对前景进行卷积,而放弃了包含有用信息的背景,这可能会降低整体精度,尤其是在无人机图像中普遍存在微小物体的情况下。本文提出了一种轻量级的 CESC 模块,它可以联合使用焦点信息和全局上下文进行增强,同时提高后续计算的稳定性。
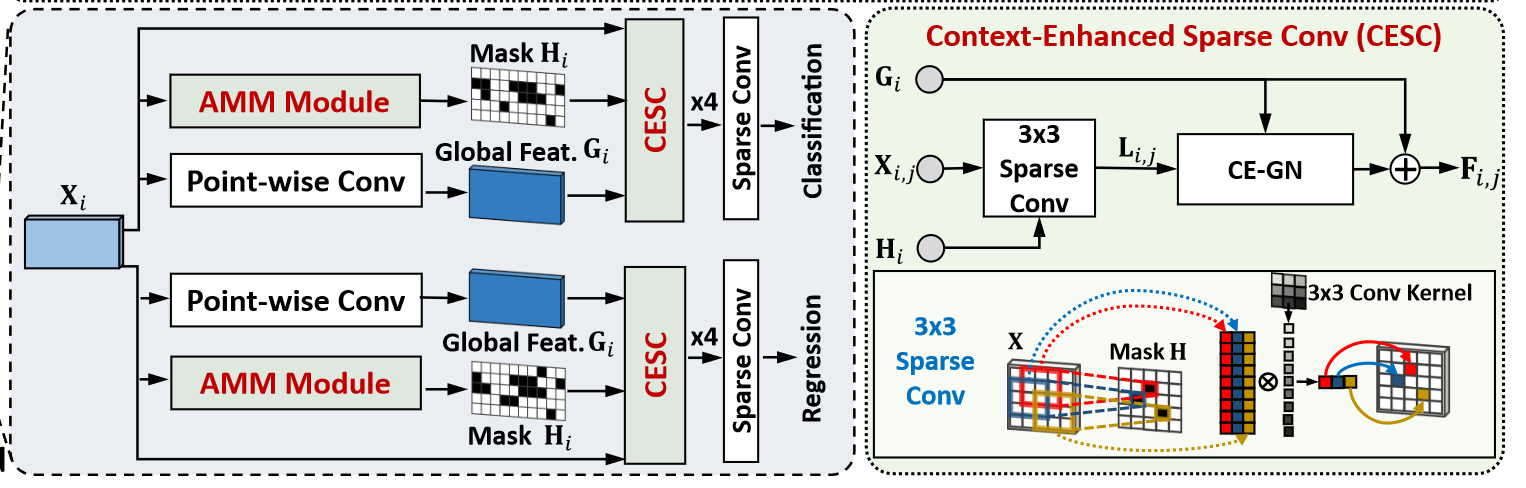
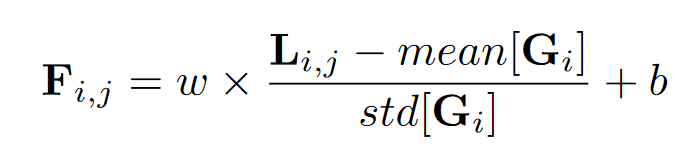
\(L_{i,j}\)是对特征图使用SC后的结果,\(w,b\)是可学习参数。

优化了损失函数,对输入的特征图使用一个密集卷积得到\(C_{i,j}\)。
Adaptive Multi-layer Masking(AMM)
在没有任何额外约束的情况下,稀疏检测器会倾向于以较大的激活比(或较小的掩码比)生成掩码,以获得更高的精度,从而增加整体计算成本。为了解决这个问题,现有的大多数尝试都使用固定的激活比。然而,由于航空图像的前景会出现剧烈波动,固定比率容易导致计算量大幅增加,或因前景区域覆盖不足而降低精度。
提出AMM以自适应的计算激活比。
对于第 i 层 FPN,得到地面实况分类结果 \(C_i ∈ R^{h_i×w_i×c}\),其中 c 表示包括背景在内的类别数;\(h_i\) 和 \(w_i\) 分别表示特征图的高度和宽度。最佳的激活比为
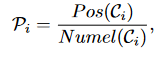
其中,\(Pos(C_i)\)和 \(Numel(C_i)\) 分别表示属于正面(前景)实例的像素数量和所有像素的数量。并采用以下损失

其中 \(Pos(H_i) ,Numel(H_i)\)表示掩码 \(H_i\) 的激活率。 \(H_i\) 被迫遵守与地面实况前景比率 \(P_i\)相同的激活比率,从而有助于生成适当的掩码比率。
最终的损失:

启示
AMM的损失函数十分简单,但是设定最优值、设定损失逼近最优值的方法具有参考价值。
- Convolutional Enhancement Detection Adaptive Networksconvolutional enhancement detection adaptive source-free detection adaptive labeling metaadapt misinformation detection adaptive convolutional segmentation biomedical networks classification convolutional imagenet networks convolutional stochastic reduction networks adaptive networks residual neural convolutional segmentation networks semantic convolutional distilling knowledge networks convolutional networks neural cnn