制器 闪存 嵌入式32g
ingress 调用istio ingress 控制器
清理环境 [root@k8s-master01 httpbin]# kubectl delete -f httpbin-gateway1.yaml -n istiogateway.networking.istio.io "httpbin-gateway" deletedvirtualservice. ......
基于arx模型的MPC预测控制器simulink仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 arx模型是一种重要的时间序列分析模型,能够用来描述实际应用中的许多问题,在经济、电力系统、车辆驾驶、医疗、信号处理等领域都有着广泛的应用。因此,基于arx模型的相关理论和方法受到了大量关注,这些方法的基本思路常常被归 ......
Jmeter使用循环控制器实现参数化
##循环控制器加csv实现参数化 1.添加循环控制器 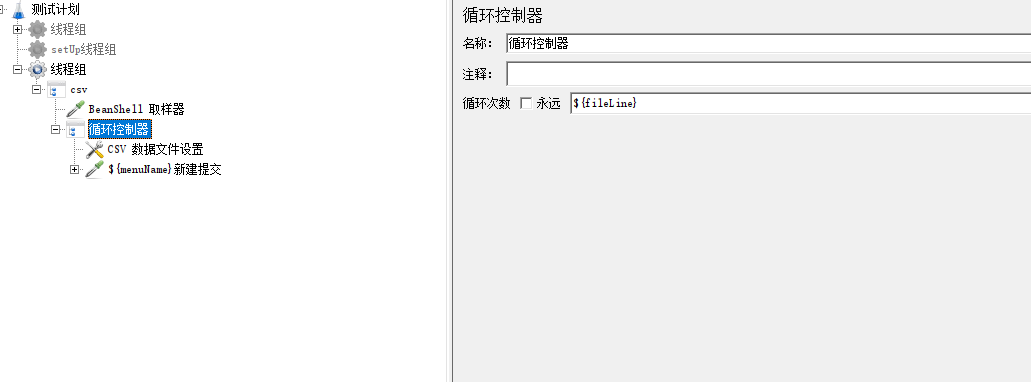 我这里的循环次数是动态的,在循环控制器前添加beanshe ......
springboot嵌入tomcat原理
一、spring自动配置原理 spring启动的时候只需要添加SpringbootApplication注解,然后运行SpringApplication.run方法就可以进行自动配置运行 1.1 springbootapplication注解是一个组合复合注解,说主要的三个注解 SpringBoot ......
UE4设置默认角色和控制器
上一节我们设置了默认地图和关卡,这一节我们来设置默认的角色和控制器和默认地图不一样,默认角色和控制器需要设置在 GameMode 里面。 1) 打开 VS 编辑器, 打开“APlayingGameModeBase.h”文件,声明一个构造函数: 2) 在“APlayingGameModeBase.cp ......
EMERSON控制器模块MVME6100
W;① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨EMERSON控制器模块MVME6100,SE3008 KJ2005X1-MQ2 13P0072X082,A6500-CC 9199-00120,VS3202,VE4036P2,VE4003S2B4,VE4003S2B3,VE4002S1T2B5,VE4 ......
掌握嵌入式Linux编程0简介
### 简介 多年来,Linux一直是嵌入式计算的主流。然而,涵盖这一主题的书籍却少之又少:本书旨在填补这一空白。术语 "嵌入式Linux "没有很好的定义,可以应用于从恒温器到Wi-Fi路由器到工业控制单元等各种设备内部的操作系统。然而,它们都是建立在相同的基本开源软件上。这些就是我在本书中描述的 ......
cc1310 CC1310F128RSMR CC1310F128RGZR 无线收发器 微控制器
CC1310 系列是一款经济高效型超低功耗低于 1GHz 射频器件。具有 128kB 闪存的 SimpleLink™ 32 位 Arm Cortex-M3 低于 1GHz 无线 MCU CC1310 系列特点 封装:VQFN (48) 封装尺寸:7.00mm × 7.00mm 性能强大的 Arm® ......
可配置Modbus网关 嵌入式设备联网解决方案
1.概述 可配置Modbus网关可以预先配置Modbus RTU端的设备的地址、功能码和寄存器列表,并存储到网关内部。网关会自动采集这些配置的RTU设备的数据,然后映射到连续的Modbus TCP寄存器地址,从而允许Modbus TCP端一次性读取所有的设备的不同寄存器的数据。它的这种地址映射功 ......
雷达原理与系统 第九讲 脉冲调制器
雷达原理与系统 第九讲 脉冲调制器 1. 雷达发射机—— 1).定义:为雷达提供一种载波受到调制的满足特定要求的大功率射频信号,经馈线和收发开关由天线辐射出去。 2). 分类—— (1) 按照波形方式分类—— A. 连续式发射机 B. 脉冲式发射机 Ba. 分类—— a. 单级振荡式:用一级大功率振 ......
m一级倒立摆的动态模拟和零极点配置控制器matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据火箭助推器 ......
m基于simulink的SPWM控制器性能仿真,并分析其谐波,包括park模块和Clark模块
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 SHEPWM是特定谐波消除脉宽调制,即通过开关时刻的优化选择,产生PWM来消除选定的低次谐波。 MATLAB仿真中的SHEPWM的发波采用S函数编写,S函数是一种用于描述Simulink仿真模块的计算机语言,它结合了m ......
KONGSBERG控制器备件RMP201-8
W;① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨KONGSBERG控制器备件RMP201-8,RCU502,MRU2,MRU-M-SU1,MRU-M-MB3,DPS112,8100183,KONGSBERG控制器备件RMP201-8,RCU502,MRU2,MRU-M-SU1,MRU-M-MB3,DP ......
我是如何搭建ChatGPT并嵌入到微信公众号的?
 ## 前言 体验方式:薇辛搜索 龚众号 【程序员Jason】,关注并点击发消息,点菜单ChatGPT 然后翻到最下面 ......
BT169-ASEMI代理KY控制器单向向可控硅BT169
编辑:ll BT169-ASEMI代理KY控制器单向向可控硅BT169 型号:BT169 品牌:ASEMI 封装:TO-92 特性:可控硅 正向电流:1A 反向耐压:600V 引脚数量:3 芯片个数:1 包装方式:3000pcs/盘 浪涌电流:40A 特点:单向可控硅 工作温度:-40℃~150℃ ......
《痞子衡嵌入式半月刊》 第 77 期
# 痞子衡嵌入式半月刊: 第 77 期  这里分享嵌入式领域有用有趣的项目/工具以及一些热点新闻,农历年分二十四节气,希望在每个交节之日准时发布一期。 本期刊是开源项目(GitH ......
基于AHB_BUS的eFlash控制器的RTL
# eFlash控制器的RTL * gg -- 跳到首页 * GG -- 按住shift,跳到尾部 * ctrl+V --> 上下键选择行 --> shift+i -->输入 -->esc退出 -- 实现列操作 * u -- 撤销操作 * . -- 重复上一次操作 * v/flash/d -- 删除 ......
m基于FPGA的PID控制器实现,包含testbench测试程序,PID整定通过matlab使用RBF网络计算
1.算法仿真效果 vivado2019.2、matlab2022a仿真结果如下: 2.算法涉及理论知识概要 PID控制器产生于1915年,PID控制律的概念最早是由LYAPIMOV提出的,到目前为止,PID控制器以及改进的PID控制器在工业控制领域里最为常见。PID控制器(比例-积分-微分控制器), ......
《安富莱嵌入式周报》第313期:搬运机器人,微软出的C语言手册,开源生物信号采集板,开源SMD回流焊,开源SDR无线电,汽车级机器人评估板
周报汇总地址:http://www.armbbs.cn/forum.php?mod=forumdisplay&fid=12&filter=typeid&typeid=104 更新一期视频教程: DSP视频教程第12期:TI开源分享IQmath DSP源码,适用于所有Cortex-M内核,本期教程做个 ......
常用嵌入式命令
解压命令:sudo tar -xvf imx-image-desktop-imx8mnevk-20221215084701.rootfs.tar.zst -C /srv/rootfs sudo dd if=imx-boot-imx8mnevk-sd.bin-flash_evk of=/dev/sdb ......
C#使用词嵌入向量与向量数据库为大语言模型(LLM)赋能长期记忆实现私域问答机器人落地之openai接口平替
恢复内容开始 在上一篇文章中我们大致讲述了一下如何通过词嵌入向量的方式为大语言模型增加长期记忆,用于落地在私域场景的问题。其中涉及到使用openai的接口进行词嵌入向量的生成以及chat模型的调用 由于众所周知的原因,国内调用openai接口并不友好,所以今天介绍两款开源平替实现分别替代词嵌入向量和 ......
GE控制器WES5123-1200,WES5123-2600
W;① ⑧ 0 ③ 0 ① 7 ⑦ 7 5 ⑨ GE控制器WES5123-1200,WES5123-2600,WES5162-9101,IC695CPU320-HS,DS200DCFBG1BLC,IS420ESWBH3A,IC695CRU320-EJ,IS420ESWBH2A,DS200TCPDG2 ......
未能封送类型,因为嵌入数组实例的长度与布局中声明的长度不匹配
### 出错场景 在调试海康SDK时,将struct类型的实例压入内存时,提示了改错误信息,具体代码如下: ``` CHCNetSDK.NET_DVR_ALARM_DEVICE_USER alarmDeviceUser = new CHCNetSDK.NET_DVR_ALARM_DEVICE_USE ......
Git版本控制器
### Git工作图 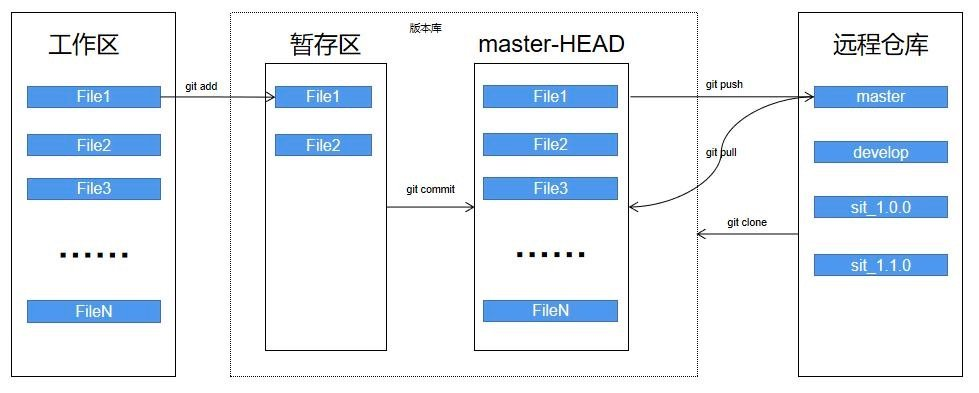 ### 四个区域和五种状态 > 四个区域 - 工作区(Working Area) - 暂 ......
m基于UKF控制器的倒立摆控制系统matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆控制,使摆杆尽快达到平衡位置,且无大的振荡和过大的角度和速度的控制系统。当摆杆到达期望位置后,系统能克服随机扰动而保持稳定。该控制系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采 ......
GE控制器IS215UCVGM06A IS215UCVGH1A VMIVME-7666-111000
W:① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨GE控制器IS215UCVGM06A IS215UCVGH1A VMIVME-7666-111000,VMICPCI-7806-211000 350-657806-211000L,VMIVME-7452,VMIVME-7807,VMIVME-7807RC ......
痞子衡嵌入式:MCUBootUtility v5.0发布,初步支持i.MXRT1180
-- 痞子衡维护的NXP-MCUBootUtility工具距离上一个大版本(v4.0.0)发布过去4个多月了,期间痞子衡也做过两个小版本更新,但不足以单独介绍。这一次痞子衡为大家带来了全新大版本v5.0.0,这次更新主要是想和大家特别聊聊恩智浦新一代 i.MXRT 旗舰 RT1180。 ### 一、 ......
计算机组成原理:控制器实验
实验名称: 4 控制器实验 实验目的 掌握微程序控制器的组成原理。 掌握微程序的编制、写入,观察微程序的运行过程。 基于数据通路图,掌握微程序控制器的工作原理。 基于微程序流程图,掌握微程序控制器的工作原理。 基于信号时序图,掌握微程序控制器的工作原理。 掌握一个简单CPU的组成原理。 在掌握部件单 ......
嵌入式linux—初级理解
对于不使用操作系统或使用小型实时操作系统(如freeRTOS)的设备来说, 与硬件相关的驱动程序与应用程序往往混合在一起,因此常常不会对驱动与应用进行严格的区分, 这也导致更换硬件平台时,应用程序移植困难。 ##1、 使用了Linux系统的设备,==硬件会由操作系统接管==。Linux系统的一个重要 ......