坐标系
空间中三个正交的轴组成,构成线性空间的一组基($?_1,?_2,?_3$)
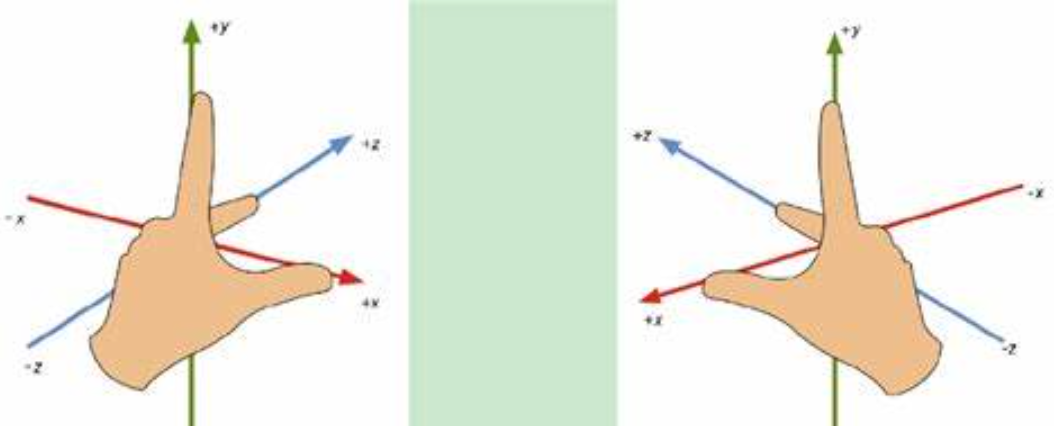
左右手系
欧拉角(Euler Angles)
将空间中的旋转分解到三次不同轴(定轴或动轴)上的转动
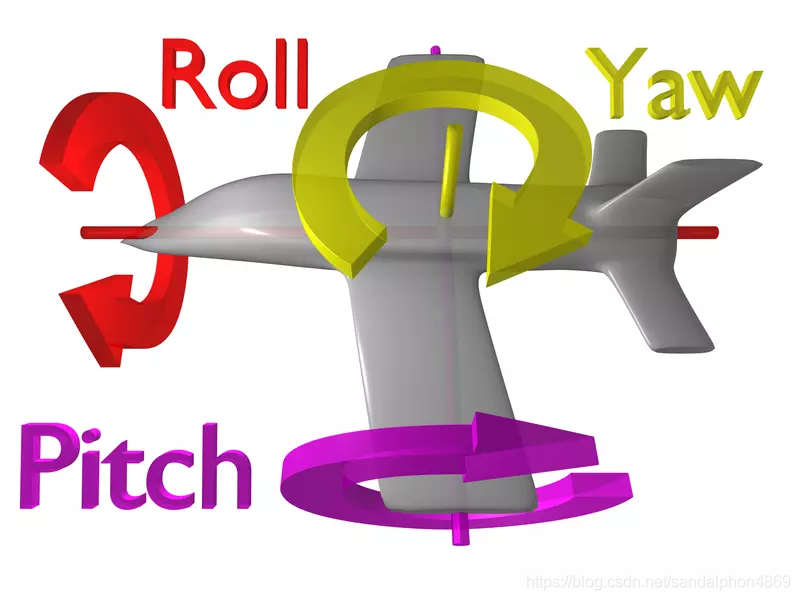
常见定义
yaw(偏航角):绕y轴旋转
pitch(俯仰角):绕x轴旋转
roll(横滚角):绕z轴旋转
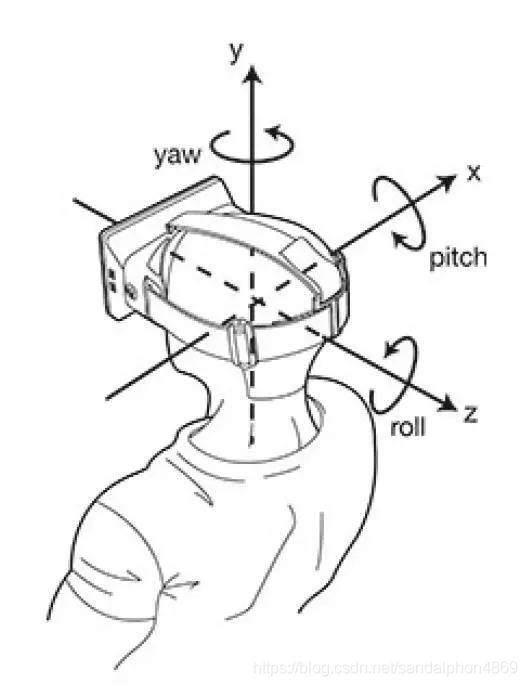 (右手系)
(右手系)
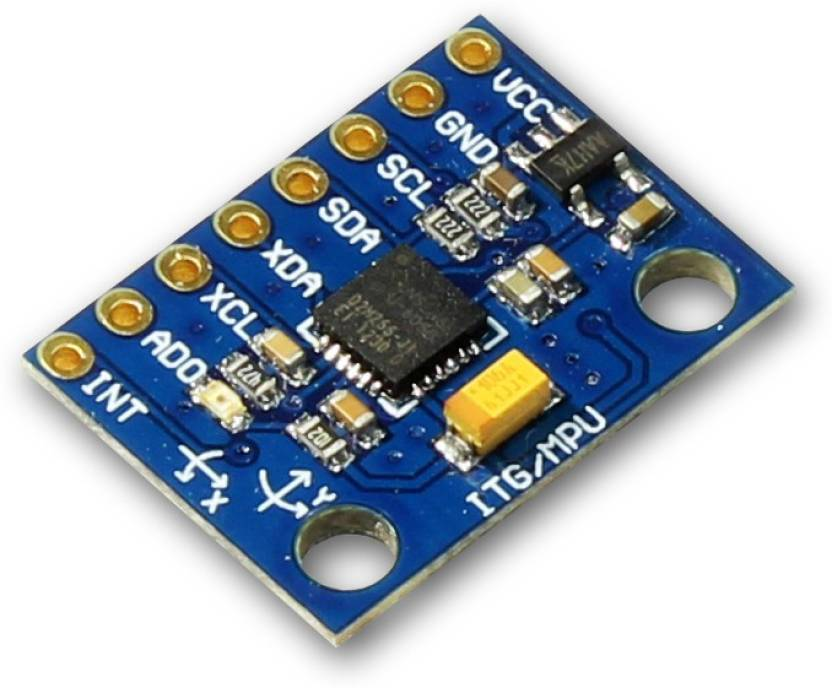
MPU6050
参考:
1.机器人的坐标体系RPY:roll轴、pitch轴和yaw轴_yaw轴pitch轴roll轴_sandalphon4869的博客-CSDN博客
坐标系
空间中三个正交的轴组成,构成线性空间的一组基($?_1,?_2,?_3$)
左右手系
欧拉角(Euler Angles)
将空间中的旋转分解到三次不同轴(定轴或动轴)上的转动
常见定义
yaw(偏航角):绕y轴旋转
pitch(俯仰角):绕x轴旋转
roll(横滚角):绕z轴旋转
(右手系)
MPU6050
参考:
1.机器人的坐标体系RPY:roll轴、pitch轴和yaw轴_yaw轴pitch轴roll轴_sandalphon4869的博客-CSDN博客