https://zhuanlan.zhihu.com/p/47766990
==============
更新量转化
Eigen::Map<const Vector6> update(update_);
更新参数
se3_update=SE3Quat::exp(update)
setEstimate( se3_update* estimate());
==============

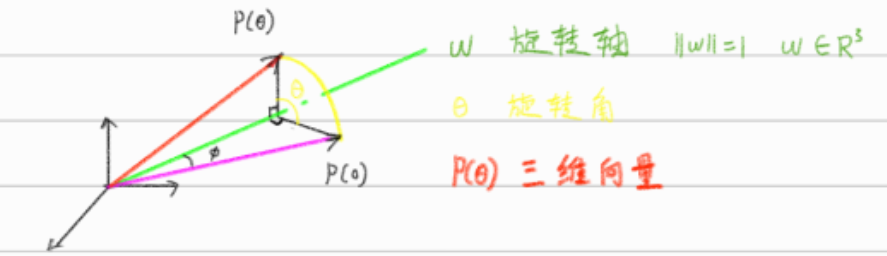
1旋转向量
(旋转)
绕旋转轴转的角度Θ 旋转轴n
2旋转矩阵(旋转)
角度 R 3*3

3-1旋转矩阵==>旋转向量
先求出角度


然后再求出旋转轴n=[ux,uy,uz]
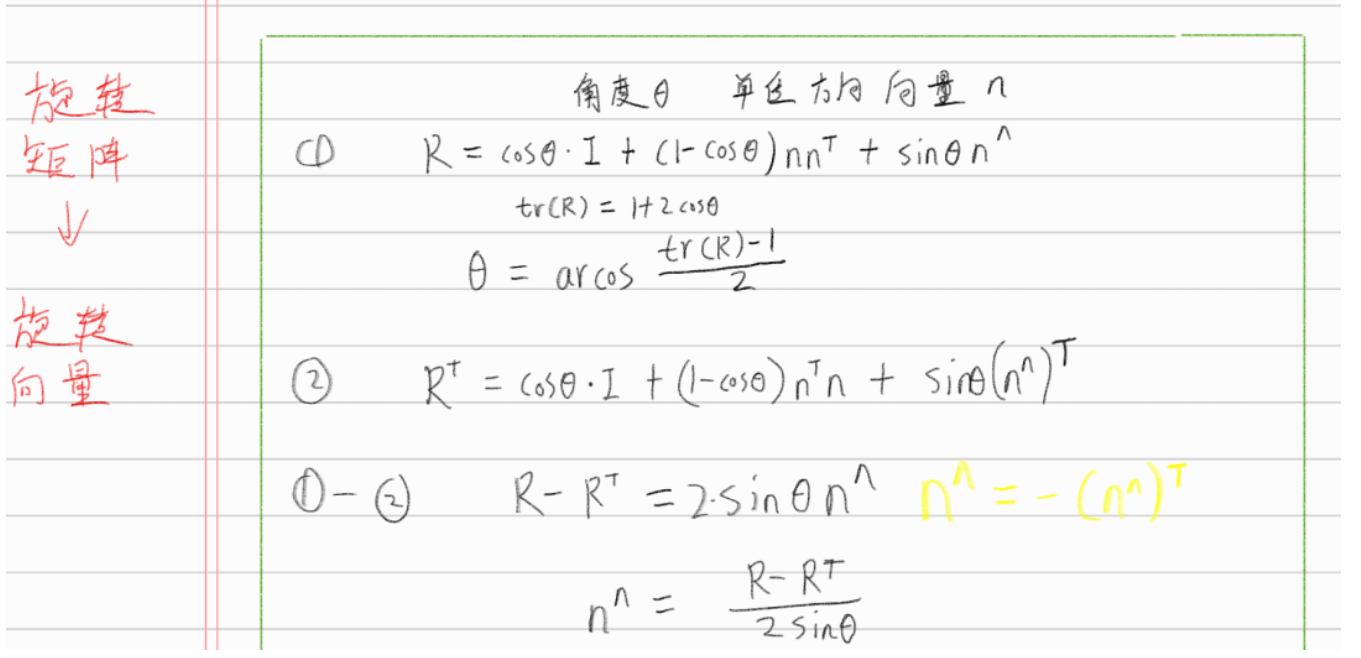

3-2 旋转向量==>旋转矩阵


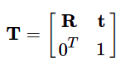
4变换矩阵 (旋转+位移)

5 目标求导
为了位姿优化,需要T对R,t求导
5-1 不能直接求导
T不能直接对R求导,求导需要加上微小量,t是相加性质, 但是R不是相加性质,且R具有正交约束限制,因此需要转换T

5-2 R需要转换

或者


过程






