制器atsamd a-ssnt attiny
微控制器实时操作系统实践1实时系统介绍
## 0书籍简介 这本实践指南将为你提供最重要的功能知识,以使实时操作系统(RTOS)在微控制器(MCU)上启动和运行。如果你有兴趣学习如何通过使用实际硬件的实例来实现RTOS的应用,并讨论常见的性能与开发时间的权衡,那么你就来对地方了!我们将使用自由RTOS来实现代码! 我们将使用FreeRTOS ......
ABB PM851AK01-eA 模块 控制器
ABB PM851AK01-eA 模块 控制器 ABB PM851AK01-eA 模块 控制器 电位器装置 工作原理 - 滑块的运动(通过作用在其上的外力)导致电位器中的电阻发生变化,随后桥接电路中的电阻发生变化 应用 - 压力、位移 电阻应变片 工作原理 - 导线的膨胀或压缩会改变元件的电阻,应用 ......
ingress 调用istio ingress 控制器
清理环境 [root@k8s-master01 httpbin]# kubectl delete -f httpbin-gateway1.yaml -n istiogateway.networking.istio.io "httpbin-gateway" deletedvirtualservice. ......
基于arx模型的MPC预测控制器simulink仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 arx模型是一种重要的时间序列分析模型,能够用来描述实际应用中的许多问题,在经济、电力系统、车辆驾驶、医疗、信号处理等领域都有着广泛的应用。因此,基于arx模型的相关理论和方法受到了大量关注,这些方法的基本思路常常被归 ......
Jmeter使用循环控制器实现参数化
##循环控制器加csv实现参数化 1.添加循环控制器 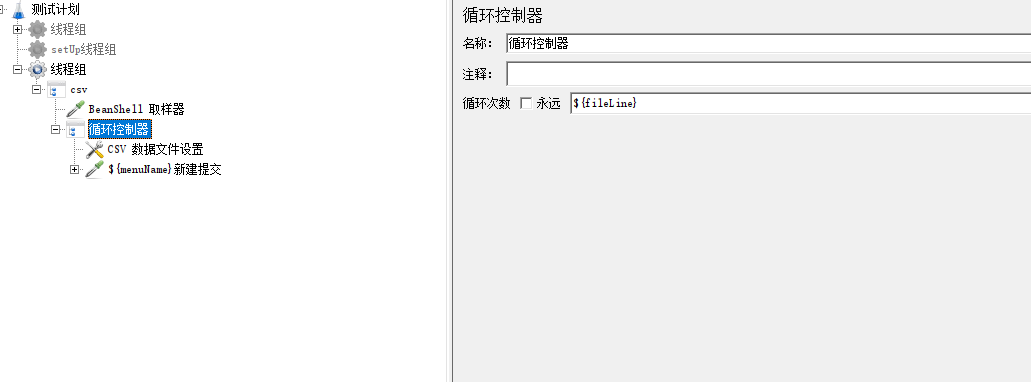 我这里的循环次数是动态的,在循环控制器前添加beanshe ......
UE4设置默认角色和控制器
上一节我们设置了默认地图和关卡,这一节我们来设置默认的角色和控制器和默认地图不一样,默认角色和控制器需要设置在 GameMode 里面。 1) 打开 VS 编辑器, 打开“APlayingGameModeBase.h”文件,声明一个构造函数: 2) 在“APlayingGameModeBase.cp ......
EMERSON控制器模块MVME6100
W;① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨EMERSON控制器模块MVME6100,SE3008 KJ2005X1-MQ2 13P0072X082,A6500-CC 9199-00120,VS3202,VE4036P2,VE4003S2B4,VE4003S2B3,VE4002S1T2B5,VE4 ......
cc1310 CC1310F128RSMR CC1310F128RGZR 无线收发器 微控制器
CC1310 系列是一款经济高效型超低功耗低于 1GHz 射频器件。具有 128kB 闪存的 SimpleLink™ 32 位 Arm Cortex-M3 低于 1GHz 无线 MCU CC1310 系列特点 封装:VQFN (48) 封装尺寸:7.00mm × 7.00mm 性能强大的 Arm® ......
雷达原理与系统 第九讲 脉冲调制器
雷达原理与系统 第九讲 脉冲调制器 1. 雷达发射机—— 1).定义:为雷达提供一种载波受到调制的满足特定要求的大功率射频信号,经馈线和收发开关由天线辐射出去。 2). 分类—— (1) 按照波形方式分类—— A. 连续式发射机 B. 脉冲式发射机 Ba. 分类—— a. 单级振荡式:用一级大功率振 ......
m一级倒立摆的动态模拟和零极点配置控制器matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据火箭助推器 ......
m基于simulink的SPWM控制器性能仿真,并分析其谐波,包括park模块和Clark模块
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 SHEPWM是特定谐波消除脉宽调制,即通过开关时刻的优化选择,产生PWM来消除选定的低次谐波。 MATLAB仿真中的SHEPWM的发波采用S函数编写,S函数是一种用于描述Simulink仿真模块的计算机语言,它结合了m ......
KONGSBERG控制器备件RMP201-8
W;① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨KONGSBERG控制器备件RMP201-8,RCU502,MRU2,MRU-M-SU1,MRU-M-MB3,DPS112,8100183,KONGSBERG控制器备件RMP201-8,RCU502,MRU2,MRU-M-SU1,MRU-M-MB3,DP ......
BT169-ASEMI代理KY控制器单向向可控硅BT169
编辑:ll BT169-ASEMI代理KY控制器单向向可控硅BT169 型号:BT169 品牌:ASEMI 封装:TO-92 特性:可控硅 正向电流:1A 反向耐压:600V 引脚数量:3 芯片个数:1 包装方式:3000pcs/盘 浪涌电流:40A 特点:单向可控硅 工作温度:-40℃~150℃ ......
基于AHB_BUS的eFlash控制器的RTL
# eFlash控制器的RTL * gg -- 跳到首页 * GG -- 按住shift,跳到尾部 * ctrl+V --> 上下键选择行 --> shift+i -->输入 -->esc退出 -- 实现列操作 * u -- 撤销操作 * . -- 重复上一次操作 * v/flash/d -- 删除 ......
m基于FPGA的PID控制器实现,包含testbench测试程序,PID整定通过matlab使用RBF网络计算
1.算法仿真效果 vivado2019.2、matlab2022a仿真结果如下: 2.算法涉及理论知识概要 PID控制器产生于1915年,PID控制律的概念最早是由LYAPIMOV提出的,到目前为止,PID控制器以及改进的PID控制器在工业控制领域里最为常见。PID控制器(比例-积分-微分控制器), ......
GE控制器WES5123-1200,WES5123-2600
W;① ⑧ 0 ③ 0 ① 7 ⑦ 7 5 ⑨ GE控制器WES5123-1200,WES5123-2600,WES5162-9101,IC695CPU320-HS,DS200DCFBG1BLC,IS420ESWBH3A,IC695CRU320-EJ,IS420ESWBH2A,DS200TCPDG2 ......
Git版本控制器
### Git工作图 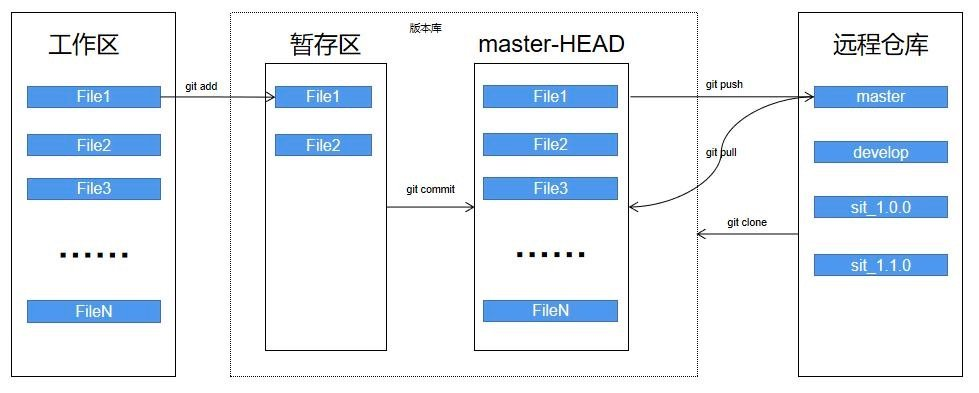 ### 四个区域和五种状态 > 四个区域 - 工作区(Working Area) - 暂 ......
m基于UKF控制器的倒立摆控制系统matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆控制,使摆杆尽快达到平衡位置,且无大的振荡和过大的角度和速度的控制系统。当摆杆到达期望位置后,系统能克服随机扰动而保持稳定。该控制系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采 ......
GE控制器IS215UCVGM06A IS215UCVGH1A VMIVME-7666-111000
W:① ⑧ 0 ③ 0 ① 7 7 ⑦ 5 ⑨GE控制器IS215UCVGM06A IS215UCVGH1A VMIVME-7666-111000,VMICPCI-7806-211000 350-657806-211000L,VMIVME-7452,VMIVME-7807,VMIVME-7807RC ......
计算机组成原理:控制器实验
实验名称: 4 控制器实验 实验目的 掌握微程序控制器的组成原理。 掌握微程序的编制、写入,观察微程序的运行过程。 基于数据通路图,掌握微程序控制器的工作原理。 基于微程序流程图,掌握微程序控制器的工作原理。 基于信号时序图,掌握微程序控制器的工作原理。 掌握一个简单CPU的组成原理。 在掌握部件单 ......
基于FPGA的16QAM调制器verilog实现,包括testbench,并通过MATLAB显示FPGA输出信号的星座图
1.算法仿真效果 matlab2022a/vivado2019.2仿真结果如下: 将FPGA仿真的数据导出,然后在matlab中将数据通过噪声之后,可以得到如下的星座图效果。 fpga工程版本信息: <?xml version="1.0" encoding="UTF-8"?> <!-- Produc ......
华普物联HP-IOCAT-088 CAT1/4G网络IO控制器
产品概述 HP-0CAT-088 CAT.1/4G网络10控制器,实现数字信号以及RS485设备数据的采集并通过CAT.1/4G网络进行远程管理控制;支持8路继电器输出、8路输入,支持 50CKET 连接远程服务器,支持主动上报功能;遵循华普云主动上报协议;支持两种工作模式:主机模式、从机模式,主机 ......
ABB工业中央控制器PCD244A101
W;① ⑧ 0 ③ 0 ① 7 7 7 5 ⑨ ABB工业中央控制器PCD244A101 3BHE042816R0101/ZUBA003203R0001/PEC80-SCC REV.B,PCD231B 3HHE025541R0101 PCD231B101 3BHE025541R0101 PCD231 ......
UPFC:基于MATALB/Simulink的统一潮流控制器(UPFC)的仿真模型,另附赠一份模型描述仿真参数文档。
UPFC:基于MATALB/Simulink的统一潮流控制器(UPFC)的仿真模型,另附赠一份模型描述仿真参数文档。仿真条件:MATLAB/Simulink R2015bID:4160659615889476 ......
基于SOA海鸥优化算法的二阶时滞系统PID控制器最优参数计算matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 一般来说,海鸥是群居性的,它们用自己的智慧来寻找并攻击猎物。海鸥最重要的是它们的迁徙和攻击行为。迁徙被定义为海鸥从一个地方到另一个地方的季节性迁移,以寻找最丰富食物来源,以提供足够的能量。该行为可描述为: 在迁徙过程中 ......
USB 控制器 piix3-uhci, piix4-uhci, ehci, ich9-ehci1, vt82c686b-uhci, pci-ohci, nec-xhci, qemu-xhci 的区别
在折腾 TrueNAS SCALE 虚拟机的 USB Passthrough 的时候发现有很多不同种类的 USB Controller,研究了一下发现他们有这些异同点 piix3-uhci 和 piix4-uhci 是虚拟的 USB 1.1 控制器,可被用于 QEMU 和 VirtualBox 虚拟 ......
jmeter逻辑控制器使用
一、jemeter控制器的种类 1.简单控制器(Simple Controller) 作用:分组,用来组合取样器和其他逻辑控制器 2.循环控制器(Loop Controller) 作用:控制该控制器下请求的循环次数例如下图中线程数为2,循环控制器次数为3,执行后Home Page执行了2次,News ......
在访问UserController控制器下的connonParam方法的时候无法访问,报404
在访问UserController控制器下的connonParam方法的时候无法访问,报404 服务已经起来了 但是访问还是失败了找不到资源 springmvc配置类也配好了路径, 最后发现是 ServletContainersInitConfig 的getServletMappings()方法没有 ......
基于PSO优化BP神经网络PID控制器matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 PID控制器(比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分单元 D 组成。通过Kp, Ki和Kd三个参数的设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。 PID 控制器的方块图PI ......
第五章 输入输出系统 5.2 I/O设备和设备控制器
一、I/O设备 1.I/O设备的类型 2.设备与控制器之间的接口 设备并不是直接与CPU进行通信,而是与设备控制器通信,因此,在设备与设备控制器之间应有一接口 。 ①数据信号线:在设备与控制器之间传送数据信号。 双向,有缓存。 ②状态信号线:传送指示设备当前状态的信号。有:正在读/写,或准备好新的数 ......