机器recognition learning教材
【机器学习】决策树
# Decision Tree ## 熵 \- entropy ### 数学表达式 $$ H(p_1) = -p_1 \text{log}_2(p_1) - (1- p_1) \text{log}_2(1- p_1) $$ ### 代码 ```python # UNQ_C1 # GRADED FUN ......
【机器学习】K-Means
# K-Means ## 找最接近的质心 ### 公式 $$ c^{(i)} := j \quad \mathrm{that \; minimizes} \quad ||x^{(i)} - \mu_j||^2 $$ 其中,范式$||X||$,其计算公式为 $$ ||X|| = \sqrt{x_1^2 ......
【机器学习】逻辑回归
# Logistic Regression > 分类问题 > > 本质是分类,要预测的变量是离散的值 ## 逻辑回归模型 ### 数学表达式 $$ z = \vec w \cdot \vec x + b \tag{1} $$ $$ f_{\vec w, b}(\vec x) = g(z) \tag{ ......
【机器学习】正则化
# Regularized ## Cost function for regularized linear regression ### 数学表达式 $$ J(\mathbf{w},b) = \frac{1}{2m} \sum\limits_{i = 0}^{m-1} (f_{\mathbf{w}, ......
【机器学习】协同过滤
# Collaborative Filtering Recommender Systems > 解决相似度问题 ## 概念 准确率 = $accuracy = \frac{预测正确的样本}{总样本}$ 精确率 = $precision = \frac{预测成功的正类}{预测的正类}$ 【不能误检】 ......
【机器学习】神经网络
# Neural Networks > 神经网络:一种计算模型,由大量的节点(或神经元)直接相互关联而构成。每个节点(除输入节点外)代表一种特定的输出函数(或者认为是运算),称为激励函数;每两个节点的连接都代表该信号在传输中所占的比重(即认为该信号对该节点的影响程度) > > 神经网络三要素:模型、 ......
【机器学习】softmax回归
# Softmax Regression > (多标签分类)将多输入的分类值转化为\[0,1\]的概率分布,进而进行逻辑回归算法 > > softmax能将差距大的数值距离拉得更大,但是数值可能会溢出 ## Softmax Function ### 数学表达式 $$ a_j = \frac{e^{z ......
工业机器人的形态(非姿态)
# 工业机器人的形态 当我们描述机器人在空间的一个位姿时,通常使用直角坐标系、工具坐标系或用户坐标系(统称为笛卡尔坐标系)的点。但是同样的一个位姿对于关节坐标系来说可能有多个值。 
# 工业机器人的坐标系 机器人的坐标系是重中之重,它是理解机器人运动的基础。机器人所有运动的点位都是建立在坐标系的基础之上,所以如果坐标系不理解,那么就很难真实了解机器人是如何运动的。 ## 什么是坐标系? 我们需要移动机器人来工作,但是如何让机器人移动?当然我们可以单独控制机器人的每根轴来动作,但 ......
【机器学习】单变量线性回归
# ML introduction > 机器学习:从数据中学习,而不依赖于规则下编程的一种算法 > > **Goal: $min_{w,b}(J(w, b))$ \- 提供一种衡量一组特定参数与训练数据拟合程度的方法** ## Supervised Learning > right answer & ......
[Robot]FANUC发那科机器人零点标定
FANUC的机械原点校准是通过零点标定来进行,具体操作步骤如下。首先,需要设定变量$MASTER_ENB 的值为 1,具体步骤为。1.MENU-下一页-变量。2. ITEM-输入313-变量$MASTER_ENB 的值设为 1。(注:不一定是313,可以通过shift+上/下键进行快速翻页查找)。接 ......
埃斯顿机器人在线编程
1, 设置电脑IP与机器人控制器LAN2口为同一网段; 2, 打开, 点击连接; 3, 下载和上载程序 4, 如果想通过电脑控制埃斯顿机器人点动, 需要下载单独的示教器demo, 且官网下载不到; ......
人工智能学习之机器学习总结1
人工智能里面分机器学习和深度学习,机器学习里有线性回归,逻辑回归,聚类,深度学习里有卷积神经网络和循环神经网和多层感知器 首先学习了线性回归,其思想就是使用梯度下降算法(求导数)对a和b求导数,不断搜索迭代以求最好的线性a,b,使得预测值和真实值的差距越来越小,同时有损失函数MSE和R2 来评估模型 ......
解决(几乎)任何机器学习问题(1、建立你的工作环境)
> 原作者:Abhishek Thakur > 原文:[GitHub - abhishekkrthakur/approachingalmost: Approaching (Almost) Any Machine Learning Problem](https://github.com/abhishe ......
Improved deep reinforcement learning for robotics through distribution-based experience retention
 **发表时间:**2016(IROS 2016) **文章要点:**这篇文章提出了experience repl ......
机器学习中的数据预处理指南
在机器学习任务中,数据处理的相关工作常会占据整个项目近70%的时间,因为真实的数据质量往往具有参差不齐,噪音、缺失、不一致等问题,不利于算法模型的训练。 因此,数据处理是机器学习项目中至关重要的一步,数据质量决定着模型质量的上限。 在本文中,我们将着重讨论将原始数据转换为结构化数据处理中的所有数据预 ......
Python和PyTorch深入实现线性回归模型:一篇文章全面掌握基础机器学习技术
# 1. 简介 ## 1.1 线性回归模型概述 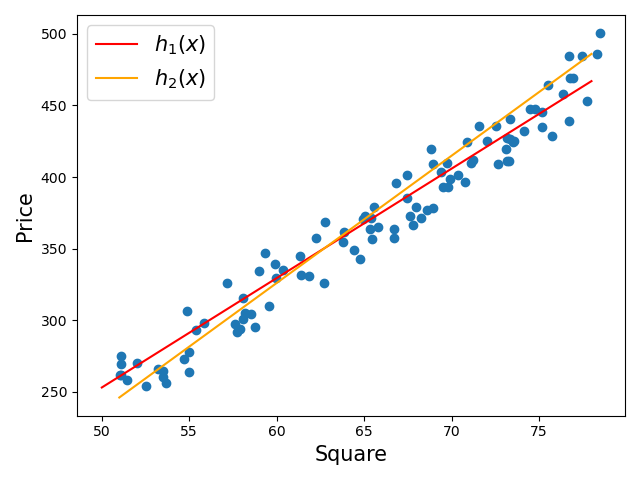 线性回归是一种统计学中的预测分析,该方法用于建立两种或两种以 ......
吴恩达机器学习笔记(四)
# 吴恩达机器学习笔记(四) ## bellman方程 $s$:当下所处的状态 $a$:在s状态下要采取的行动 $Q(s,a)$:在s状态下采用a行动后,所能获取的最大奖励 $R(s)$:在当前状态下所能获得的奖励 $\gamma$:折扣因子,在0到1之间 
# 吴恩达机器学习笔记(二) # 决策树模型 ## 什么是决策树 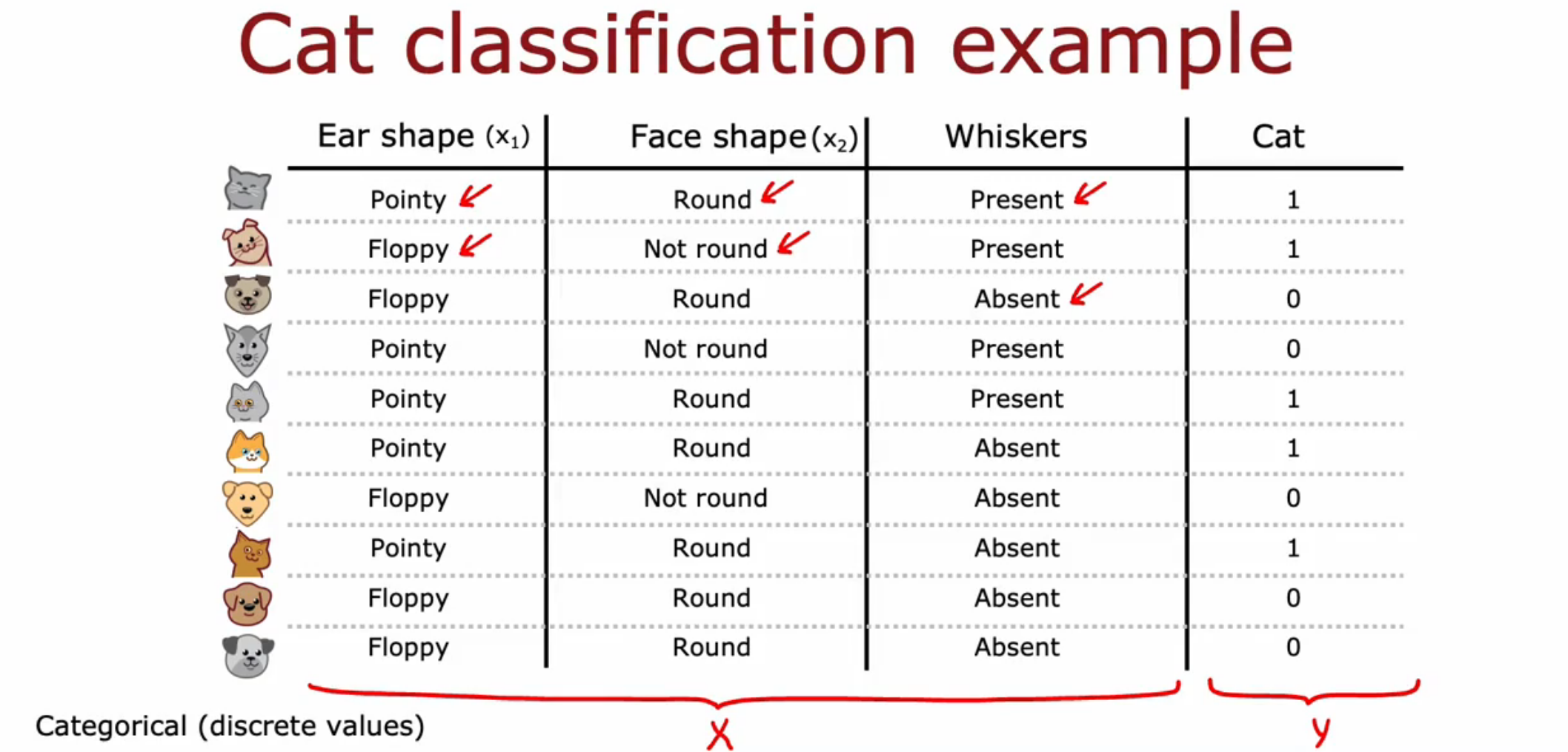 给定一组数据,如果想对数据进行分类或者回归 ......
吴恩达机器学习笔记(三)
# 吴恩达机器学习笔记(三) # K-means聚类 聚类算法用于一组没有标签的数据,将其分成不同的组。 K-means聚类算法一般做的是这两件事: - 将点分配到不同的聚簇上(根据与聚簇中心的距离) - 移动聚簇中心 直到聚簇中心不再变化为止。 ## 具体流程 对于$K$个聚簇,$m$个数据点,流 ......
吴恩达机器学习笔记(一)
# 吴恩达机器学习笔记(一) # 迁移学习 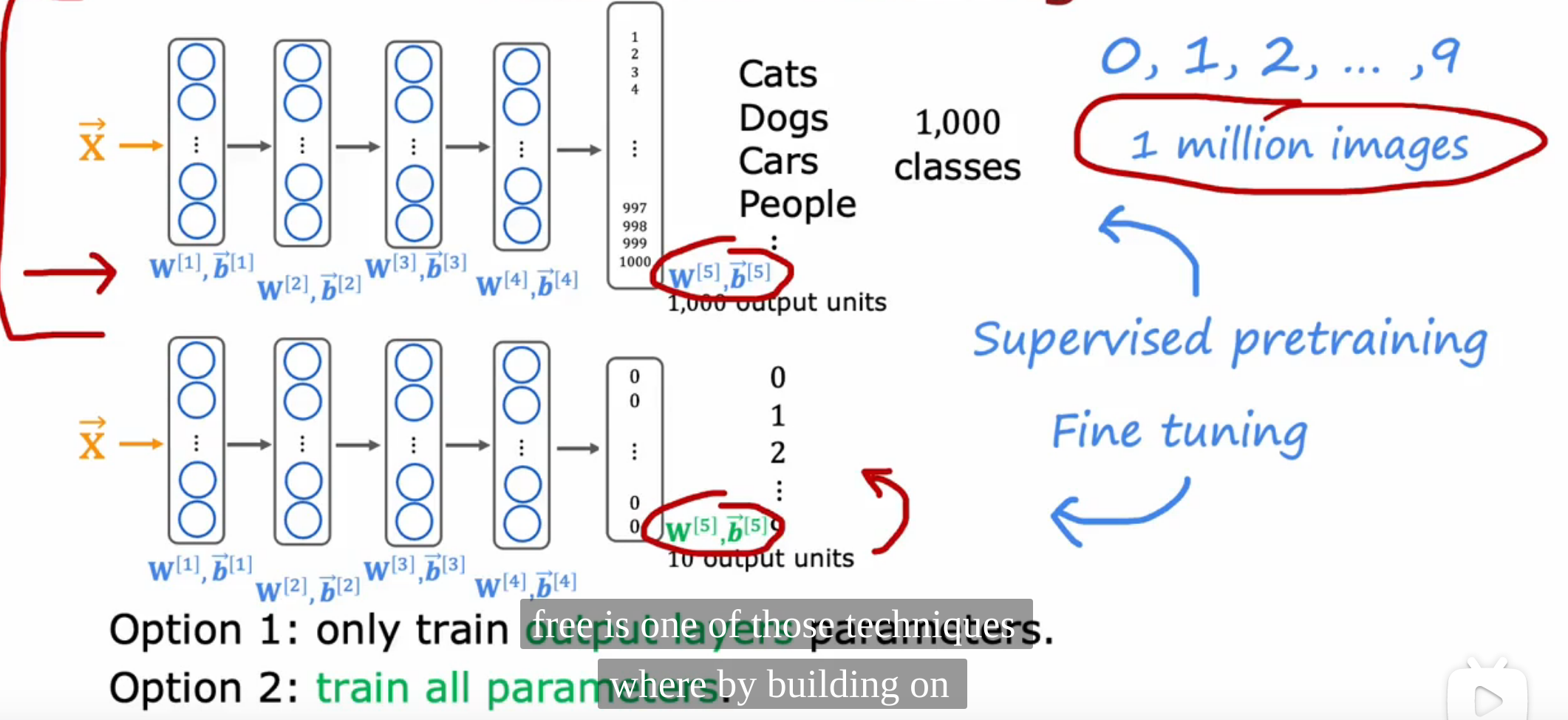 **解释:** 当需要训练小数据模型时,可以使用已经训练好的大 ......
关于个人微信的机器人开发
我们是一家专业服务企业数字化微信管理服务的技术服务团队,服务于需求SCRM、机器人、营销系统、社群小助手等具有研发能力的企业,同时我们也接收因使用Xp方案、ipad方案、PC方案导致被批量封号的企业,我们合作伙伴目前包含:金融服务行业Top10、国企事业单位、上市企业、知名淘客品牌、知名Xp企业、提 ......
机器学习中的几种交叉验证方法(5种)
> 参考自Kaggle大神approachingalmost的书籍[《Approaching (Almost) Any Machine Learning Problem》](https://github.com/abhishekkrthakur/approachingalmost/) ## 交叉验证 ......
9、教程-5 四轮机器人
本教程旨在从头开始创建您的第一个机器人。机器人将由一个身体、四个轮子和两个距离传感器组成。结果如图所示。下图显示了机器人的俯视图。tutorial_4_wheels_robot.png 四轮机器人的三维视图。请注意,机器人主体及其轮子的坐标系表示以相同的方式定向。它们的+x矢量(红色)定义机器人的左 ......
掌握Python最强大的机器学习库
[TOC] # UIE-X在医疗领域的实战 **PaddleNLP全新发布UIE-X 🧾,除已有纯文本抽取的全部功能外,新增文档抽取能力。** UIE-X延续UIE的思路,**基于跨模态布局增强预训练模型**[文心ERNIE-Layout](https://github.com/PaddlePad ......
Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection(1)
MonoCon的网络结构和MonoDLE几乎一样,只是添加了辅助学习(Auxiliary Learning, AL)模块. 网络结构如上图所示,对于3D目标检测来说,预测2D框是没有必要的,但是MonoCon在训练阶段仍然计算了2D框的损失函数,但是在推理的时候,并不会预测2D框,这就是所谓的辅助学 ......
Flutter如何实现Dart到iOS机器指令
Flutter 使用了自定义的编译工具链,称为 Flutter Engine,将 Dart 代码编译成 iOS 设备的机器指令。以下是 Flutter 在 iOS 上编译和链接的一些关键步骤和涉及的文件: 1. **编译步骤**: - Dart 代码编译:首先,Flutter 使用 Dart 编译器 ......
个微API开发,个人微信机器人
E云 是一套完整的的第三方服务平台,包含微信API服务、企微API服务、SCRM系统定制、企微系统定制、服务类软件定制等模块,本文档主要讲述个微API服务相关,以下简称API,它能处理用户微信中的各种事件,提供了开发者与个微对接的能力,技术上来讲是一款基于微信提供的个人开放性API,使用简单,操作快 ......