机器recognition learning教材
Learning Transferable Visual Models From Natural Language Supervision
Learning Transferable Visual Models From Natural Language Supervision 作者:Alec Radford *1 Jong Wook Kim *1 Chris Hallacy 1 Aditya Ramesh 1 Gabriel Goh ......
【RL】L7-Temporal-difference learning
## TD learning of state values The data/experience required by the algorithm: - $\left(s_0, r_1, s_1, \ldots, s_t, r_{t+1}, s_{t+1}, \ldots\right)$ or ......
机器学习实战5-KMeans聚类算法
# 概述 聚类 VS 分类   有监督学习 VS 无监督学习  > 原文作者:Zico Kolter,修改:Chuong Do, Tengyu Ma > > 翻译:[黄海广](ht ......
机器学习实战4-数据预处理
# 数据无量纲化  ## preprocessing.MinMaxScaler(归一化) 是一类在强化学习中广泛应用的算法,用于学习价值函数或策略。Sarsa和Q-learning都是基于时态差分法的重要算法,用于解决马尔可夫决策过程(Markov Decision Process, MDP)中的强化学习问题。 下面是最简单的T ......
论文解读(SimGCL)《Are Graph Augmentations Necessary? Simple Graph Contrastive Learning for Recommendation》
Note:[ wechat:Y466551 | 可加勿骚扰,付费咨询 ] 论文信息 论文标题:Are Graph Augmentations Necessary? Simple Graph Contrastive Learning for Recommendation论文作者:Junliang Yu ......
剑指 Offer 13. 机器人的运动范围(中等)
题目: 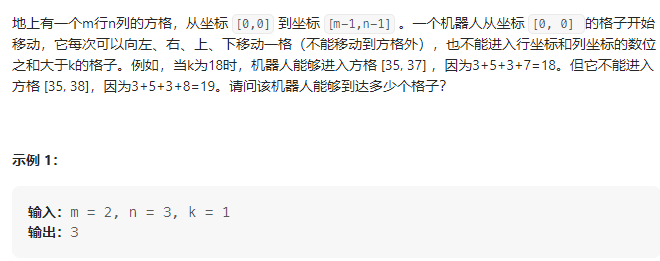 ``` class Solution { //本题的思路为递归法 public: int cal(int ......
01、机器学习(吴恩达)
### 1、机器学习简介 1. 机器学习的应用 2. 机器学习的定义 - Arthur Samuel(1959)下的定义是:**在没有被明确编程的前提下,赋予计算机学习能力的研究** > Arthur Samuel(阿瑟·塞缪尔)的小故事:阿瑟·萨缪尔是人工智能研究的先驱。他编写了一个下棋的程序,该 ......
[数据库]postgresql数据库支持其他机器访问设置
位置:C:\Program Files\PostgreSQL\14\data 修改文件:pg_hba.conf # TYPE DATABASE USER ADDRESS METHOD # "local" is for Unix domain socket connections only local ......
机器人编程教程1机器人简介
#1 机器人简介 我们将制作一个机器人,并为其创建程序,赋予机器人行为,使其看起来具有智能并能够做出决策。我们将编写代码,使用传感器观察机器人周围的环境,并构建高级主题的实际示例,包括视觉、语音识别和说话。 您将看到简单的构建技术如何与少量代码相结合,使机器感觉像某种宠物。你还将看到当机器出错时如何 ......
机器学习实战3-随机森林算法
# 概述 ## 集成算法概述   $ 通过某个假设 $h\in \cal H$ 再通过某个损失函数,可 ......
Paper Reading: Multitree Genetic Programming With New Operators for Transfer Learning in Symbolic Regression With Incomplete Data
针对数据集存在缺失值的问题,本文提出了一种基于多树 GP(MTGP) 的迁移学习方法 pMTGPDA,用于将知识从完整的源域转移到不完整的目标域中。首先在源域的数据集上训练多个 SR 模型,通过模型中的训练细节计算源域的特征和实例的权重作为先验知识。然后将提取的权重知识用于基于 MTGP 的转换,构... ......
论文阅读 | Layer-wised Model Aggregation for Personalized Federated Learning
面向个性化联合学习的分层模型聚合 ==在本文中,我们提出了一种新的pFedLA训练框架,该框架能够区分不同客户端的每一层的重要性,从而能够优化具有异构数据的客户端的个性化模型聚合。==具体来说,我们在服务器端为每个客户端使用一个专用的超网络,它被训练来识别层粒度上的相互贡献因素。同时,引入参数化机制 ......
机器学习实战
[toc] # 机器学习基础 ## 机器学习的关键术语 1、属性:将一种事务分类的特征值称为属性,例如我们在做鸟类分类时,我们可以将体重、翼展、脚蹼、后背颜色作为特征,特征通常时训练样本的列,它们是独立测量得到的结果,多个特征联系在一起共同组成一个训练样本 2、目标变量:就是我们要分类的那个结果 3 ......
论文解读(LightGCL)《LightGCL: Simple Yet Effective Graph Contrastive Learning for Recommendation》
Note:[ wechat:Y466551 | 可加勿骚扰,付费咨询 ] 论文信息 论文标题:LightGCL: Simple Yet Effective Graph Contrastive Learning for Recommendation论文作者:Cai, Xuheng and Huang, ......
基于机器视觉和倾角传感器的位姿检测系统及验证
悬臂式掘进机位姿检测是综掘工作面自动化的基础和前提。只有获取稳定可靠的掘进机实时位姿,才能够在此基础上进行综掘工作面自动化、智能化改造工作。 为了提高井下综掘工作面的生产效率,西安电子科技大学机电工程学院的研究团队提出一种基于机器视觉和倾角传感器的悬臂式掘进机位姿检测系统,使用井下矿用防爆式激光指向 ......
机器学习方面各层次书籍推荐
1 基础强数学型 1.1 Foundations of Machine Learning 豆瓣评分9.0 (103人) 有大量的数学公式推到和课后习题,用来提升对于机器学习原理公式的理解 1.2 统计学习方法 李航 + b站带读 2 入门型 漫画机器学习入门 零基础机器学习 ......
我的一个机器人朋友
# 0xFF - 前言 rt,开个坑。 准备复刻 dottle 老师的文章。 # 0x01 - 正文 今天主要是想给大家分享我的一个机器人朋友的故事。他的故事很有趣,也很励志,希望能平复一点大家紧张的心情。 机器人学习信竞,是具有常人没有的优势的。 我高一刚刚来学校集训的时候,bot 就展现出了他的 ......
编织人工智能:机器学习发展历史与关键技术全解析
>本文全面回顾了机器学习的发展历史,从早期的基本算法到当代的深度学习模型,再到未来的可解释AI和伦理考虑。文章深入探讨了各个时期的关键技术和理念,揭示了机器学习在不同领域的广泛应用和潜力。最后,总结部分强调了机器学习作为一种思维方式和解决问题的工具,呼吁所有参与者共同探索更智能、更可持续的未来,同时 ......
使用 Errbot 在 Python 中构建一个简单的聊天机器人
您可以使用 Errbot(聊天机器人)从聊天室以交互方式启动脚本。errbot 最重要的功能是它可以连接到您想要的任何聊天服务器,并具有一系列功能。它甚至可以连接到您的松弛和不和谐频道并与用户互动。 现在您知道我们正在处理什么,让我们开始吧。 开始 最好在虚拟环境中下载 errbot,而不是直接安装 ......
Learning by teaching --- 费曼学习法
世界上存在成千上万种学习法,如果上天只让我掌握一种,那一定就是“费曼学习法”。 ## 介绍 费曼学习法是由诺贝尔物理学奖获得者理查德·费曼提出的一种学习方法,其核心思想是将所学内容用自己的话表达出来,以此检验自己对知识的掌握程度。 费曼学习法可以简化为四个单词:**Concept**、**Teach ......
在机器学习中使用 SHAP 值实现模型可解释性
在这篇博文中,我们介绍了 SHAP 值,这是一种解释机器学习模型输出的方法。我们已经展示了如何使用 SHAP 值来解释单个预测和模型的整体性能。我们还提供了如何在实践中使用 SHAP 值的示例。 ......
探讨|使用或不使用机器学习
动动发财的小手,点个赞吧! 机器学习擅长解决某些复杂问题,通常涉及特征和结果之间的困难关系,这些关系不能轻易地硬编码为启发式或 if-else 语句。然而,在决定 ML 是否是当前给定问题的良好解决方案时,有一些限制或需要注意的事项。在[这篇文章](https://towardsdatascienc ......