控制器
k8s 控制器-Replicaset-Deployment cordon drain
k8s 控制器-Replicaset-Deployment # cordon 警戒线 执行后不会在调度到该节点上了[root@master01 deployment]# kubectl cordon node01node/node01 cordoned[root@master01 deploymen ......
AD主辅域控切换-辅域控制器升级为主域控制器-详细操作
前述 本文主要是来源于参考,过程中遇到一些问题,故对一些容易出错的地方进行了注释和讲解 环境介绍 Active Directory域控制器已经搭建好主域控和辅域控,主域控故障,手动升级辅域控为主。 主域控:2012DC1,ip:192.168.15.1 辅域控:2012DC2,ip:192.168. ......
linux设备树-pin控制器驱动
内核版本:linux 5.2.8根文件系统:busybox 1.25.0u-boot:2016.05 上一节我们已经分析了pinctrl subsystem,这一节将会介绍pin controller driver的编写。其主要包含两个步骤: 为SoC pin controller分配一个pinct ......
m基于simulink的负荷频率小波神经PID控制器仿真,并对比PID控制器
1.算法仿真效果 matlab2022a仿真结果如下: 其对比仿真结果可知,原系统需要在150之后才开始收敛,PID是在50开始收敛,而采用WNN之后,系统用在经过短暂的抖动之后,迅速收敛。 2.算法涉及理论知识概要 随着电力工业的市场化改革、厂网分开,跨区域 电网的互联电力系统自动控制显得更加重要 ......
linux设备树-中断控制器驱动(二)
一、GPIO控制器驱动 xx 二、引用intc中断的节点的解析 xx 三、引用GPIO中断的节点的解析 xx 参考文章 [1]基於tiny4412的Linux內核移植 实例学习中断背后的知识(1) [2]基於tiny4412的Linux內核移植 实例学习中断背后的知识(2) ......
m十字路口多功能控制交通系统,包括基于遗传算法优化的红绿灯时长模糊控制器和基于BP神经网络的车牌识别算法
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 单十字路口: 其中第一级控制为两个并行模块:绿灯交通强度控制模块与红灯交通强度控制模块。绿灯交通强度控制模块的输入为绿灯相位的排队长度与入口流量,输出绿灯相位的交通强度;红灯相位模块的输入为红灯相位的排队长度,输出为红 ......
while循环逻辑控制器+配置元件计数器的用法
一、在线程组下添加逻辑控制器While Controller 二、在逻辑控制器While Controller下添加Sample,BeanShell Sampler , 三、逻辑控制器While Controller下添加配置元件,计数器 四、在线程组下添加监听器,察看结果树: 注意while中设置 ......
PVD-CH32可编程电压控制器PVD中断的使用方法
可编程电压监视器PVD,主要被用于监控系统主电源的变化,与电源控制寄存器PWR_CTLR 的PLS[2:0]所设置的门槛电压相比较,配合外部中断寄存器(EXTI)设置,可产生相关中断,以便及时通知系统进行数据保存等掉电前操作。 配置方法如下: 先使能PWR时钟,然后设置电压监视阈值,随后使能PVDE ......
linux设备树-中断控制器驱动
我们在linux驱动移植-中断子系统执行流程 介绍了中断的执行流程,以及在没有使用设备树的情景下,中断控制器的注册流程,其主要流程: 将S3C2440中断资源抽象为一个主中断控制器、两个子中断控制器,一个用于管理外部中断源、另一个管理带有子中断的内部中断源; 采用基于数组方式分配中断描述符(stru ......
if控制器使用说明
目录 一、IF 控制器的运用场景 二、举例说明 (一)添加If控制器” (二)函数助手使用 (三)运行效果 一、IF 控制器的运用场景 在做接口测试过程中,部分场景的接口是否请求取决于上一个接口的返回结果 比如:现在一些网站,用户去登录的时候,先走登录的流程,如果是网站用户就登录成功;如果不是网站的 ......
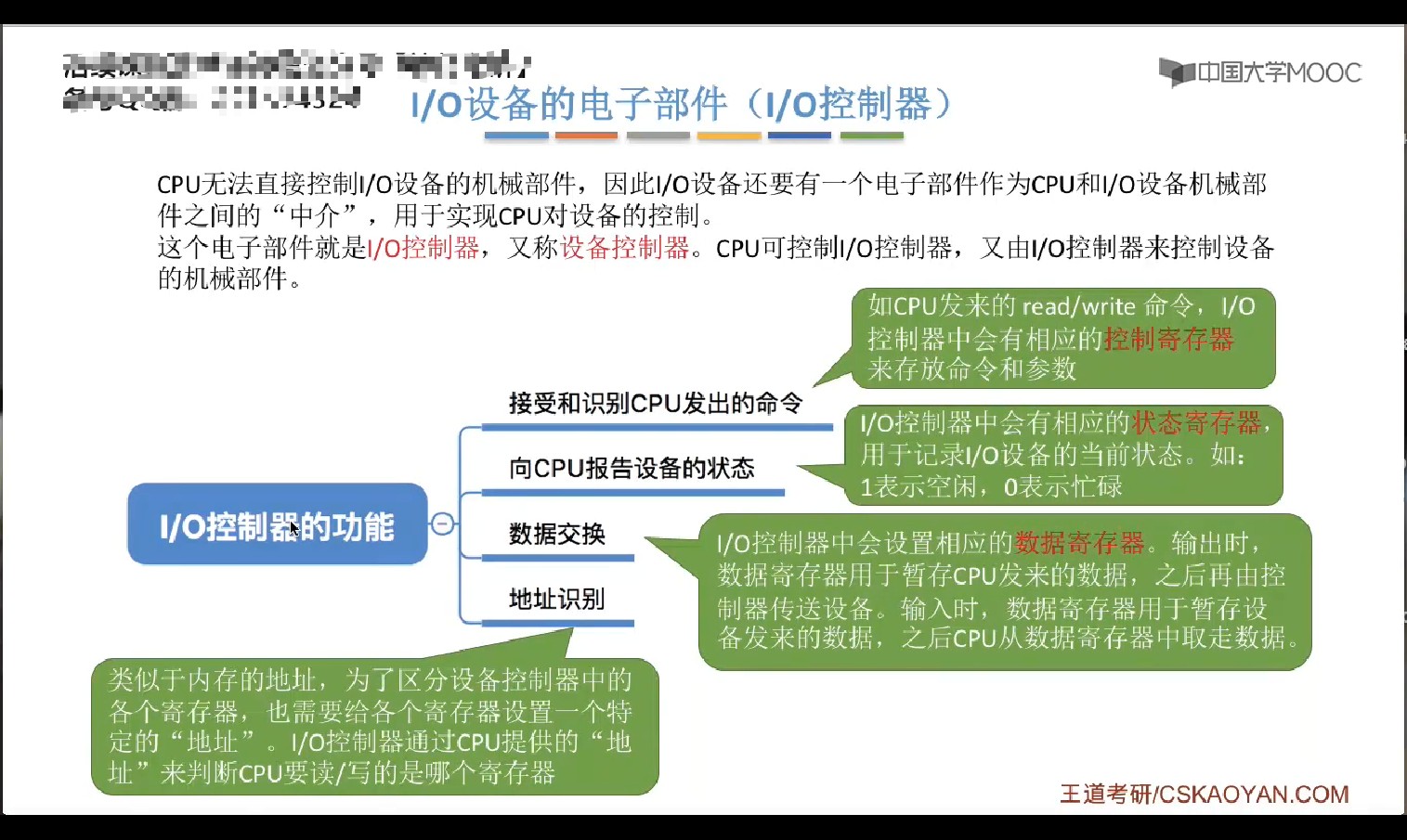
王道408操作系统-IO设备控制器/IO接口
 -参数化及控制器等
一:jmeter中参数化 参数化:是指把请求中的请求参数的常量变为变量,即静态参数实现动态加载 参数化方式: 1,CSV 数据文件设置 2,用户定义的变量(参数一般当做全局的) 3,函数助手:例如:_rodmon 1,CSV 数据文件设置 1,文件名为存放参数文件的路径 例如C:/Users/MI/ ......
JMeter之ForEach控制器
一、简介 ForEach控制器一般和用户自定义变量或者正则表达式提取器一起配合使用,其在用户自定义变量或者从正则表达式提取器的结果中读取一系列相关的变量。 该控制器下的取样器都会被执行一次或多次,每次读取不同的变量值。 二、场景 有一组关键字变量【hello,python,测试】、使用用户定义的变量 ......
ABB工业控制器 UNITROL 1020 3BHE030579R0003 UNS0119A-Z,V1 3BHE030579R0001
W;1 ⑧ 0 ③ 0 ① ⑦ 7 7 ⑤ 9ABB UNITROL 1020 3BHE030579R0003 UNS0119A-Z,V1 3BHE030579R0001 DDC779BE02 3BHE006805R0002 XO08R2 1SBP260109R1001 PM866K01 3BSE0 ......
Jmeter之如果(IF)控制器
一、场景 定义一个name变量等于baidu时,访问百度网址,如果name变量等于Itcast,则访问itcast网址 二、具体操作步骤 配置元件-用户自定义变量 线程组-逻辑控制器-IF控制器(函数助手对话框,使用_jexl3函数) HTTP请求 ......
m基于simulink的六自由度高超声速飞行器内外环飞行控制器设计与仿真实现
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 高超声速飞行器是指飞行马赫数大于5的飞行器,它是一种近空间飞行器。“近空间”可简单理解为:现有飞机飞行的最高高度(约20Km)和卫星运行轨道的最低高度(约100Km)间的空域。近空间飞行器可定性描述为:能持久稳定运行于 ......
基于FNN模糊神经网络的控制器解耦控制matlab仿真
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 系统的复杂性与所要求的精确性之间存在尖锐矛盾,为此,通过模拟人类学习和自适应能力,人们提出了智能控制的思想。控制理论专家Austrom(1991)在IFAC 大会上指出:模糊逻辑控制、神经网络与专家控制是三种典型的智能 ......
基于神经网络的自适应PID控制器 通过将RBF(BP)神经网络和PID控制器相结合
基于神经网络的自适应PID控制器 通过将RBF(BP)神经网络和PID控制器相结合,建立了神经网络PID控制器,采用传递函数进行系统建模,通过自动调整PID参数,实现了对方波信号的跟踪。 程序有注释YID:5650652300828715 ......
JMeter 逻辑控制器、定时器、分布式、报告、并发数计算方法、性能监控
一、逻辑控制器 可以按照设定的逻辑控制取样器的执行顺序 1、IF 控制器(没有 else,如果有其他分支,则一直加 IF控制器即可) 控制它下面的测试元素是否运行 位置:测试计划 线程组 (右键添加)逻辑控制器 如果(IF)控制器 参数: 案例:(用户定义变量:在里面添加变量:name = baid ......
准入控制器
准入控制器 准入控制器是一段代码,它会在请求通过认证和授权之后、对象被持久化之前拦截到达 API 服务器的请求。 启用和禁用准入控制器: kube-apiserver --enable-admission-plugins=NamespaceLifecycle,LimitRanger ... kube ......
m基于Simulink的自适应模糊控制器设计与仿真实现
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 模糊自适应控制器同时结合自适应控制和模糊控制,形成具有自适应的功能的控制系统。模糊自适应控制不要求控制对象具有精确的数学模型,并且还巧妙的引入了自适应律以方便实时的去学习被控对象所具有的各种动态特性,然后再根据动态特性 ......
m基于MATLAB和simulink实现模糊控制器以及模糊神经网络控制器
1.算法仿真效果 matlab2017b仿真结果如下: 2.算法涉及理论知识概要 模糊神经网络控制在控制领域里目前已经成为一个研究热点,其原因在于两者之间的互补性质。神经网络和模糊系统均属于无模型的估计器和非线性动力学系统,也是一种处理不确定性、非线性和其它不确定问题(ill-posed probl ......
自动注册控制器
uses MVCFramework.Controllers.Register, procedure TWebModule1.WebModuleCreate(Sender: TObject); begin FEngine := TMVCEngine.Create(Self); /// Add your ......
华普物联EIO版本RS485转以太网IO控制器 HP-EIO-088
HP-EIO-088 是一款以“远程控制”作为功能核心的网络 IO 产品,实现基于以太网远程和 RS485 本地控制。其支持 8 路输入、8 路输出,支持 Modbus RTU/TCP 协议。 技术参数 分类 项目 数值 硬件规格 电源 工作电压 12~36V 工作电流 352mA (aver) / ......
Camera | 7.瑞芯微rk3568平台摄像头控制器MIPI-CSI驱动架构梳理
因为有拍照、录制视频、直播等刚需,现在手机的摄像头基本都是高清,支持高清摄像头的SoC都支持MIPI-CSI。 不同SoC的MIPI-CSI在实现上有一定差别,即使同一厂家设计生产的芯片也都不尽相同。 本文基于瑞芯微rk3568平台evb1公板为例来详细讲解MIPI-CSI/DPHY驱动。 阅读本文 ......
m基于PID+kalman滤波的控制器性能MATLAB仿真
1.算法描述 PID控制器,即控制器的控制方式为P比例调整,I积分调整以及D微分调整三个部分构成,PID控制器是目前为止应用最为广泛的控制方式。PID控制器具有结构简单,性能稳定,参数设置简单等优势。PID控制器适用于各种控制对象无法进行测量获得系统参数的情况,其根据控制对象的输出和参考控制变量的输 ......
基于AHB_BUS的eFlash控制器的Datasheet
eFlash控制器的Datasheet 硬件和软件交互的文档,提供Datasheet 1.eFlash控制器功能列表 eFlash存储控制器一局软件要求完成写擦操作,其提供系统boot时的命令数据,并在main区(存储器分为Main和Infr area)存放各个IP模块工作所需要的命令数据.一般情况 ......
基于自抗扰控制器ADRC的永磁同步电机FOC
基于自抗扰控制器ADRC的永磁同步电机FOC 1.转速环采用ADRC,和传统PI进行对比来分析ADRC控制性能的优越性。 对ADRC中的ESO进行改进,进一步提高了ADRC性能。 2.提供算法对应的参考文献和仿真模型 仿真模型纯手工搭建,不是从网络上复制得到。 仿真模型仅供学习参考YID:62586 ......
直接横摆力矩分层控制器 上层LQR 下层数学规划 四轮独立驱动汽车转矩分配
直接横摆力矩分层控制器 上层LQR 下层数学规划 四轮独立驱动汽车转矩分配 DYC 与AFS集成控制器 CarSim与Simulink联合模型YID:3969664783401101 ......