摘要: 首先给出刚体被控对象的微分方程,然后对四元数微分方程线性化求出合适的PD控制参数,然后详细分析了误差四元数的概念和性质,并提出四元数和旋转矩阵的等价性,然后简要介绍了非对角转动惯量矩阵的一些特点,最后分别仿真验证了调节问题、跟踪问题和误差四元数,附录中给出了使用拉塞尔不变性原理证明PD控制稳定性的过程。
被控对象建模
首先列出被控对象的微分方程。在此之前先提一下坐标系,常用的就两个,一个是固定于地面的世界系,另一个是固定在无人机(或称刚体)上的本体系。被控对象的微分方程如下
上面两式分别称作刚体姿态动力学方程和运动学方程。第一行的动力学方程中,\(J\) 是刚体在本体系下的转动惯量(注意不是世界系下,除了四元数是本体系相对于世界系以外,其它变量都是在本体系下描述),\(\vec w\) 是刚体在本体系下的角速度向量,\(\vec M\) 是刚体在本体系下所受的力矩向量。第二行的运动学方程中,\(Q\) 是刚体在世界系下的姿态四元数,\(\circ\) 表示四元数乘法。这两个微分方程就描述了刚体从力矩到姿态的变化过程。这两个方程的进一步细节分析可以看我之前的推导笔记
姿态运动学:角速度变化时四元数和旋转矩阵微分方程的证明
姿态动力学:刚体姿态动力学推导与进动现象仿真
实际上(1)式应该是最正规的建模公式,其它建模方法都不够简洁,可以看 为何三维旋转只有三个自由度却用四元数来表示?-找不到服务器的回答 -知乎 中我和其他人的回答,航模和无人机中也都是使用四元数控制,并针对绕偏航轴的特殊性使用了“倾转分离”的算法,但我暂时还没仔细研究过。
线性化设计控制律
控制问题分为调节问题和跟踪问题。调节问题指的是,没有外部输入,设计一个状态反馈使系统稳定到平衡点;跟踪问题就是常见的使系统状态跟踪指令输入。严格的定义参考一下专业书。
使用拉塞尔不变集原理可以证明,四元数PD控制中取任意大于0的PD参数都可以让刚体从任何状态回到初始位置。我看完了证明过程仍然觉得这很不可思议,但前提是控制律也得是连续的,而实际中控制器都是离散的。证明过程贴到最后面。
尽管任意PD参数都可以保证稳定,但控制效果就不一定能保证了,下面计算合适的PD参数。在平衡点附近线性化,平衡点为 \(\vec w=\vec 0,Q=[1,0,0,0]\),
因为 \(\dot\epsilon\) 中不含输入力矩,所以对 \(\dot\epsilon\) 再次求导并忽略高阶项
如果 \(J\) 为对角阵,那么向量形式可以简单地拆开成三个轴分别设计参数
即可根据极点配置法分别确定3轴PD参数。
跟踪问题
前面设计了调节问题的控制律参数,下面研究跟踪问题。跟踪问题需要引入误差四元数的概念,可以看下面这篇论文
E. Fresk and G. Nikolakopoulos, "Full quaternion based attitude control for a quadrotor," 2013 European Control Conference (ECC), Zurich, Switzerland, 2013, pp. 3864-3869, doi: 10.23919/ECC.2013.6669617.
定义误差四元数为 \(Q_e=Q_0\circ Q^{-1}\)(这个好像不对,等我后面确认一下),其中 \(Q_0\) 为期望姿态四元数,\(Q\) 是当前姿态四元数,然后利用四元数的性质,四元数的虚部是旋转轴和旋转角度(具体见 如何形象地理解四元数?-知乎 或其他类似博客),利用姿态误差和角速度设计PD控制
其中 \(w_x, w_y, w_z\) 为三轴角速度分量,\(q_1, q_2, q_3\) 为误差四元数的虚部。根据转动惯量矩阵的实际值,三个轴的PD参数 \(k_p,k_d\) 可以不同。
跟踪问题中误差四元数的原理
再深究一下误差四元数的定义,误差四元数为什么是
而不是下面这3种?
定义函数 \(R(Q)\) 表示把一个四元数转换成旋转矩阵,有下面一些性质
(这个式子的证明见 证明四元数乘法与旋转矩阵乘法等价)所以可以类似地转换成误差旋转矩阵 \(R_e=R_0R^{-1}\),
问题就成了,怎样把当前的姿态旋转矩阵旋转到期望旋转矩阵。前面在线性化的时候把平衡点选到了 \(Q=[1,0,0,0]\) 处(后面称这个姿态为"零姿态"),如果期望姿态不在这里,那就在期望姿态处新建一个坐标系,称作期望系,使期望姿态为零姿态。此时,期望系到世界系的旋转矩阵为 \(R_0\),本体系到世界系的旋转矩阵为 \(R\),那么本体系到期望系的旋转矩阵就是 \(R_0^{-1}R\)。因为误差四元数中自带负号,相当于旋转矩阵求逆,所以等价的误差旋转矩阵为 \(R_e=R^{-1}R_0\),对应的误差四元数为
除此以外还有另外一种理解方式。已知,对一个旋转矩阵左乘旋转矩阵相当于把刚体绕世界系旋转,右乘相当于绕本体系旋转(具体解释可以看我之前写的笔记 自用的四元数、欧拉角、旋转矩阵笔记 的最后一节“xyz固定角和zyx欧拉角相等的直观理解”)
而力矩是在本体系下描述的,所以需要右乘,将本体系相对于世界系的旋转矩阵 \(R\) 右乘误差旋转矩阵 \(R_e\) 得到期望旋转矩阵 \(R_0\),于是 \(RR_e=R_0\),\(R_e=R^{-1}R_0\),也可以得到等价的误差四元数。
实际仿真中分别试了4种情况,分别为正确的误差四元数和式(3)中表示的另外3种情况,发现都能达到期望姿态,但是正确的误差四元数的过渡过程是最快的。仿真代码和结果见下文“跟踪问题仿真”一节。
非对角矩阵
转动惯量矩阵是正定矩阵,证明见 Positive Definiteness of the Moment of Inertia Tensor 当转动惯量矩阵不是对角阵时,需要取线性变换转换成对角阵。取 \(\vec\alpha=C\vec\epsilon\),于是
变为
取合同变换矩阵 \(C\) 使 \(CJ^{-1}C^{-1}\) 为对角阵。合同变换结果不唯一, \(C\) 的取值既影响 \(k_p,k_d\) 参数,也通过 \(\vec\alpha\) 影响 \(\vec\epsilon\) 的稳定性。感觉 \(C\) 的取值类似于选择合适的传递函数零点,虽然不影响稳定性,但影响收敛速度。
合同变换方法见 请问求二次型的标准型的三种方法?
调节问题仿真
被控对象如下。其中 quaternions.py 的代码见 自用的四元数、欧拉角、旋转矩阵转换代码。
这个被控对象也在后面的仿真中使用。
# rigidbody.py
# 四阶龙格库塔法建立刚体的运动学和动力学模型
import numpy as np
from quaternions import *
# 默认控制律,没有期望姿态
def Control_Law(state):
Qv, W = state[1:4], state[4:7]
return -np.array([2, 20, 6])*Qv -np.array([2, 20, 6])*W
# 刚体
# J: 刚体的转动惯量矩阵
# initEuler: 刚体的初始欧拉角
# initOmega: 刚体的初始角速度向量
class RigidBody:
def __init__(self, J, initEuler, initOmega):
self._J = J
e1 = initEuler
w1 = initOmega
self._t = 0
self._Jinv = np.linalg.inv(self._J)
q1 = Euler_To_Quaternion(e1)
self._states = np.concatenate((q1, w1), dtype=float)
self.ctrlLaw = Control_Law # 默认控制律
def Simulate_OneStep(self):
h = 0.01
K1 = self._ODE4Function(self._t, self._states)
K2 = self._ODE4Function(self._t+h/2, self._states + h/2*K1)
K3 = self._ODE4Function(self._t+h/2, self._states + h/2*K2)
K4 = self._ODE4Function(self._t+h, self._states + h*K3)
dx = h/6*(K1 + 2*K2 + 2*K3 + K4)
self._states += dx
def Get_State(self):
return self._states
def Get_QuaternionVec(self):
return Quaternion_to_Euler(self._states[0:4])
def _ODE4Function(self, t, x):
Qs, Qv, W = x[0], x[1:4], x[4:7]
dQs = -0.5*np.dot(Qv, W)
dQv = 0.5*(Qs*W + np.cross(Qv, W))
torque = self.ctrlLaw(x)
dW = self._Jinv @ (torque - np.cross(W, self._J @ W))[0]
return np.concatenate((np.array([dQs]), dQv, np.array(dW)[0]))
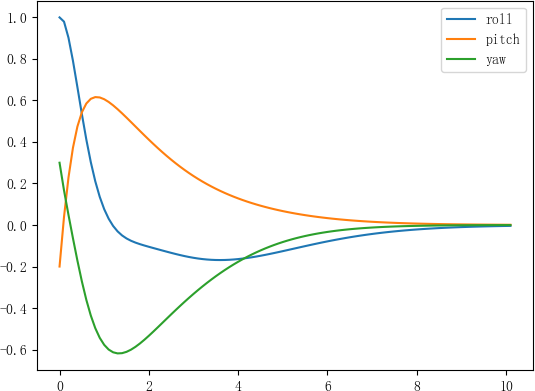
主程序代码如下。
# main.py
import numpy as np
import matplotlib.pyplot as plt
from rigidbody import RigidBody
J = np.matrix([
[1, 0, 0],
[0, 10, 0],
[0, 0, 3],
])
usv1 = RigidBody(J, np.array([1, -0.2, 0.3]), np.array([-0.1, 0.2, -3]))
t = 0
plottime, ploteuler = [], []
plottime.append(t)
ploteuler.append(usv1.Get_QuaternionVec())
while 1:
for n in range(10):
usv1.Simulate_OneStep()
t += 0.1
plottime.append(t)
ploteuler.append(usv1.Get_QuaternionVec())
if t > 10:
break
pass
print(ploteuler[-1])
plt.plot(plottime, ploteuler)
plt.legend(['roll', 'pitch', 'yaw'])
plt.show()
仿真结果如下
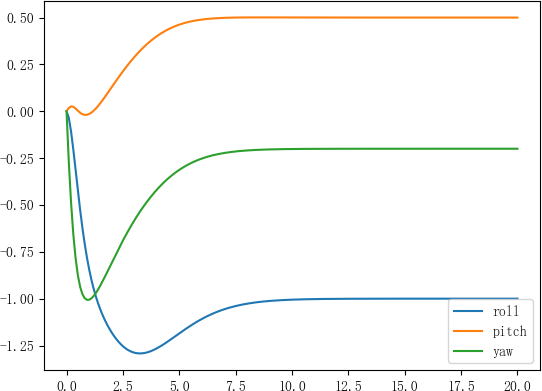
跟踪问题仿真
期望姿态角分别为 \(-1, 0.5, -0.2\)。
import numpy as np
import matplotlib.pyplot as plt
from quaternions import *
from rigidbody import RigidBody
def Control_Law(state):
Qcurrent, omega = state[0:4], state[4:7]
Qerr = Quaternion_Product(Quaternion_Inverse(Qcurrent), Qtarget) # +
# Qerr = Quaternion_Product(Quaternion_Inverse(Qtarget), Qcurrent) # -
# Qerr = Quaternion_Product(Qtarget, Quaternion_Inverse(Qcurrent)) # x
# Qerr = Quaternion_Product(Qcurrent, Quaternion_Inverse(Qtarget)) # x
torque = np.array([2, 20, 6])*Qerr[1:4] -np.array([2, 20, 6])*omega
return torque
J = np.matrix([
[1, 0, 0],
[0, 10, 0],
[0, 0, 3],
])
Qtarget = Euler_To_Quaternion(np.array([-1, 0.5, -0.2]))
usv1 = RigidBody(J, np.array([0, 0, 0]), np.array([-0.1, 0.2, -3]))
usv1.ctrlLaw = Control_Law
t = 0
plottime, ploteuler = [], []
plottime.append(t)
ploteuler.append(usv1.Get_QuaternionVec())
while 1:
for n in range(10):
usv1.Simulate_OneStep()
t += 0.1
plottime.append(t)
ploteuler.append(usv1.Get_QuaternionVec())
if t > 20:
break
pass
print(ploteuler[-1])
plt.plot(plottime, ploteuler)
plt.legend(['roll', 'pitch', 'yaw'])
plt.show()
其中控制律代码中列出了4种误差四元数,后面分别有+-xx的注释,+表示控制律为
torque = np.array([2, 20, 6])*Qerr[1:4] -np.array([2, 20, 6])*omega
-表示控制律为
torque = -np.array([2, 20, 6])*Qerr[1:4] -np.array([2, 20, 6])*omega
x表示结果不正确,但也能逐渐过渡到期望姿态。标+-两种情况的仿真结果相同,如下图所示
标xx的两种情况分别为
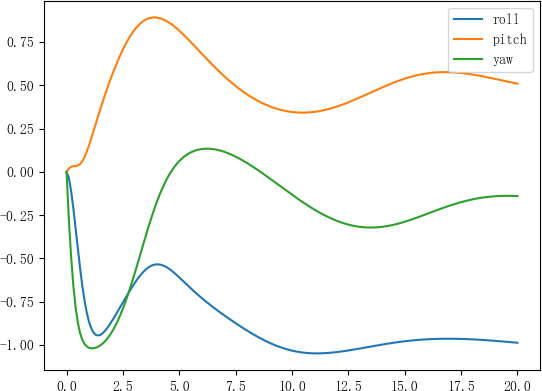
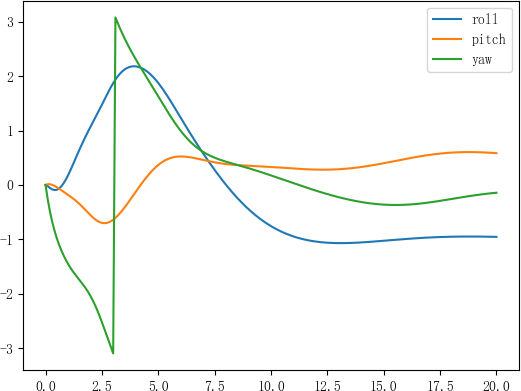
并且同样的原理,改了控制律中-np.array([2, 20, 6])前面的正负号后,上面两种结果交换顺序后完全相同。
附录
这一节讲下面这本书的第24章里介绍的方法,使用拉塞尔不变集原理证明PD控制稳定性。
De Ruiter. Spacecraft dynamics and control: an introduction. 2013.
拉塞尔不变集原理
一个多输入多输出非线性系统
定义 \(x\) 的解为集合 \(D\),再定义一个 \(x\) 的有界闭集 \(\Omega\) 为当 \(t\geq 0\) 时,\(x(t)\in\Omega\)。令 \(V(\vec x):D\to\mathbb R\) 为一个连续可微函数并满足 \(\dot V\leq 0\),定义集合 \(E\) 为 \(\dot V(\vec x)=0\) 时 \(\vec x\) 的集合。令 \(M\) 为 \(E\) 中的最大不变集,那么当 \(t\to\infty\) 时,\(\vec x(t)\to M\)。
运用拉塞尔不变集原理的步骤为
- 构造能量函数V,可以不是正定函数。
- 求能量函数的时间一阶导数,判断是否 \(\dot V(x)\leq 0\)。如果不满足,需要重新构造。
- 令 \(\dot V=0\),求子集 \(E\)。
- 判断子集 \(E\) 中的不变集,找出最大的不变集 \(M\)。
关于拉塞尔不变集更详细的解释建议参考khaill的《非线性系统》。
拉塞尔不变集原理解读(包含径向无界性的解读)
关于LaSalle不变集定理的一个问题
非线性与自适应控制(三)LaSalle Invariance Principle
关于开集、闭集、紧集可以参考
【最优化】几何概念概述
小白拓补学|4. 究竟什么是紧集(compact set)?
证明PD控制稳定性
把四元数的标量和向量部分分别记作 \(\eta\) 和 \(\vec\epsilon\),于是被控对象可以写作
设计控制律
代入姿态动力学方程得到
考虑能量函数
求导
然后求不变集。因为单位四元数满足
所以
假设转动惯量矩阵的3个主惯量轴满足
于是
其中 \(V_0=V(\eta(0),\vec\epsilon(0),\vec w(0))\),于是
\(\Omega\) 中的子集 \(E\) 为 \(\dot V=0\) 时 \(\vec x\) 的集合,即 \(\vec w=0\)
下面求最大不变集,将 \(\vec w=0\) 代入被控对象式(A.1)得
因为 \(\vec w=0\),所以 \(\dot{\vec w}=0,\vec\epsilon=0\),由单位四元数的性质得 \(\eta=\pm 1\),所以最大不变集
这就是刚体最后稳定的状态。
前面的推导中假设了转动惯量矩阵是对角阵,如果不是对角阵的话,实际的系统的转动惯量矩阵一定是正定矩阵,那么可以经过线性变换转换成正定的对角阵,也可以类似得到 \(\vec w\) 的范围。具体细节有待进一步推导。