坐标系 坐标 机器人 机器
实现nginx访问日志IP转换坐标
1、设置nginx access_log日志格式 log_format main '$remote_addr - $remote_user [$time_local] ' '"$request" $status $body_bytes_sent ' '"$http_referer" "$http_u ......
圆柱坐标系(Cylindrical Coordinate System)
参考:[维基百科](https://zh.wikipedia.org/wiki/%E5%9C%93%E6%9F%B1%E5%9D%90%E6%A8%99%E7%B3%BB) **圆柱坐标系**(英语:cylindrical coordinate system)是一种三维[坐标系统]( https:/ ......
线性代数 | 机器学习数学基础
### 前言 **线性代数**(linear algebra)是关于向量空间和线性映射的一个数学分支。它包括对线、面和子空间的研究,同时也涉及到所有的向量空间的一般性质。 本文主要介绍**机器学习**中所用到的线性代数**核心基础概念**,供读者学习阶段查漏补缺或是**快速学习参考**。 ### 线 ......
PCoA:主坐标轴的方差解释比例
在PCoA图的最下方显示"PCoA(42.78%)",而最左侧显示"PCoA(25.47%)",这些数字表示主坐标轴(Principal Coordinates)的方差解释比例(Variance Explained)。PCoA是一种降维技术,它将多维数据降低到较低维度的坐标轴,以便更好地可视化数据结 ......
机器学习实战-基于Python3和C++(5)- python之tensorflow(1)
[TOC] # tensor ```pyhon import tensorflow as tf x=tf.constant(19) y=tf.constant(22) x+y z=x+y print(z) tf.Tensor(41, shape=(), dtype=int32) a=tf.const ......
基于个微机器人的二次开发
使用微信ipad协议来开发微信机器人,可以开发的项目很多,例如一些娱乐机器人、云发单系统,私域流量的智能管理和营销拓客,还有一些自动采集和发朋友圈的云端系统等。每个行业都有需求这样的系统应用,在线教育、金融、电商已经一些个人微商应用。 可开发的功能包括但不限于: 好友管理:添加好友、删除好友、修改备 ......
tf坐标系广播羽监听的编程实现
#### 创建功能包 cd ~/catkin_ws/src catkin_create_pkg learning_tf roscpp rospy turtlesim tf #### 广播器和监听器代码 ##### 如何实现一个tf广播器 1. 定义TF广播器(TransformBroadcaster ......
ROS中坐标管理系统tf
# 机器人中的坐标变换 *基于20.04的版本对应的noetic* ### 一个自带demo sudo apt install ros-noetic-desktop-full *启动一个脚本文件* roslaunch turtle_tf turtle_tf_demo.launch *报错的话,可能是 ......
机器学习从入门到放弃:Transfomer-现代大模型的基石
一、前言 随着 ChatGPT 的横空出世,全世界的目光都聚焦在了生成式 AI 上。本次将介绍 Transformer 的发展历史、基本原理,也是记录总结自己在学习路上的所得。 首先我想聊聊 NLP 的发展路线,这样对于后面的 transformer 可能会有更好的理解。自从计算机诞生之初,让计算机 ......
Unity学习笔记(一) 坐标系和基本操作
# 1 坐标系 ## 1.1 左手坐标系和右手坐标系 > - 左手坐标系`(Unity使用)`: 伸开我们的左手, 掌心向外, 大拇指与食指成90度, 中指、无名指和小指弯曲, 大拇指指向的方向就是X轴正方向, 食指指向的方向就是Y轴正方向, 中指、无名指和小指指向的方向就是Z轴正方向。 > - 右 ......
【机器学习】决策树
# Decision Tree ## 熵 \- entropy ### 数学表达式 $$ H(p_1) = -p_1 \text{log}_2(p_1) - (1- p_1) \text{log}_2(1- p_1) $$ ### 代码 ```python # UNQ_C1 # GRADED FUN ......
【机器学习】K-Means
# K-Means ## 找最接近的质心 ### 公式 $$ c^{(i)} := j \quad \mathrm{that \; minimizes} \quad ||x^{(i)} - \mu_j||^2 $$ 其中,范式$||X||$,其计算公式为 $$ ||X|| = \sqrt{x_1^2 ......
Unity学习笔记(一) 坐标系和基本操作
# 1 坐标系 ## 1.1 左手坐标系和右手坐标系 > - 左手坐标系`(Unity使用)`: 伸开我们的左手, 掌心向外, 大拇指与食指成90度, 中指、无名指和小指弯曲, 大拇指指向的方向就是X轴正方向, 食指指向的方向就是Y轴正方向, 中指、无名指和小指指向的方向就是Z轴正方向。 > - 右 ......
【机器学习】逻辑回归
# Logistic Regression > 分类问题 > > 本质是分类,要预测的变量是离散的值 ## 逻辑回归模型 ### 数学表达式 $$ z = \vec w \cdot \vec x + b \tag{1} $$ $$ f_{\vec w, b}(\vec x) = g(z) \tag{ ......
【机器学习】正则化
# Regularized ## Cost function for regularized linear regression ### 数学表达式 $$ J(\mathbf{w},b) = \frac{1}{2m} \sum\limits_{i = 0}^{m-1} (f_{\mathbf{w}, ......
【机器学习】协同过滤
# Collaborative Filtering Recommender Systems > 解决相似度问题 ## 概念 准确率 = $accuracy = \frac{预测正确的样本}{总样本}$ 精确率 = $precision = \frac{预测成功的正类}{预测的正类}$ 【不能误检】 ......
【机器学习】神经网络
# Neural Networks > 神经网络:一种计算模型,由大量的节点(或神经元)直接相互关联而构成。每个节点(除输入节点外)代表一种特定的输出函数(或者认为是运算),称为激励函数;每两个节点的连接都代表该信号在传输中所占的比重(即认为该信号对该节点的影响程度) > > 神经网络三要素:模型、 ......
【机器学习】softmax回归
# Softmax Regression > (多标签分类)将多输入的分类值转化为\[0,1\]的概率分布,进而进行逻辑回归算法 > > softmax能将差距大的数值距离拉得更大,但是数值可能会溢出 ## Softmax Function ### 数学表达式 $$ a_j = \frac{e^{z ......
工业机器人的形态(非姿态)
# 工业机器人的形态 当我们描述机器人在空间的一个位姿时,通常使用直角坐标系、工具坐标系或用户坐标系(统称为笛卡尔坐标系)的点。但是同样的一个位姿对于关节坐标系来说可能有多个值。 
# 工业机器人的坐标系 机器人的坐标系是重中之重,它是理解机器人运动的基础。机器人所有运动的点位都是建立在坐标系的基础之上,所以如果坐标系不理解,那么就很难真实了解机器人是如何运动的。 ## 什么是坐标系? 我们需要移动机器人来工作,但是如何让机器人移动?当然我们可以单独控制机器人的每根轴来动作,但 ......
【机器学习】单变量线性回归
# ML introduction > 机器学习:从数据中学习,而不依赖于规则下编程的一种算法 > > **Goal: $min_{w,b}(J(w, b))$ \- 提供一种衡量一组特定参数与训练数据拟合程度的方法** ## Supervised Learning > right answer & ......
高德api得到坐标系
def get_GD(location): url='https://restapi.amap.com/v3/assistant/coordinate/convert?' key='208ce530fdd2dc162c8831657fff3232' link='{}locations={}&coor ......
[Robot]FANUC发那科机器人零点标定
FANUC的机械原点校准是通过零点标定来进行,具体操作步骤如下。首先,需要设定变量$MASTER_ENB 的值为 1,具体步骤为。1.MENU-下一页-变量。2. ITEM-输入313-变量$MASTER_ENB 的值设为 1。(注:不一定是313,可以通过shift+上/下键进行快速翻页查找)。接 ......
埃斯顿机器人在线编程
1, 设置电脑IP与机器人控制器LAN2口为同一网段; 2, 打开, 点击连接; 3, 下载和上载程序 4, 如果想通过电脑控制埃斯顿机器人点动, 需要下载单独的示教器demo, 且官网下载不到; ......
人工智能学习之机器学习总结1
人工智能里面分机器学习和深度学习,机器学习里有线性回归,逻辑回归,聚类,深度学习里有卷积神经网络和循环神经网和多层感知器 首先学习了线性回归,其思想就是使用梯度下降算法(求导数)对a和b求导数,不断搜索迭代以求最好的线性a,b,使得预测值和真实值的差距越来越小,同时有损失函数MSE和R2 来评估模型 ......
解决(几乎)任何机器学习问题(1、建立你的工作环境)
> 原作者:Abhishek Thakur > 原文:[GitHub - abhishekkrthakur/approachingalmost: Approaching (Almost) Any Machine Learning Problem](https://github.com/abhishe ......
机器学习中的数据预处理指南
在机器学习任务中,数据处理的相关工作常会占据整个项目近70%的时间,因为真实的数据质量往往具有参差不齐,噪音、缺失、不一致等问题,不利于算法模型的训练。 因此,数据处理是机器学习项目中至关重要的一步,数据质量决定着模型质量的上限。 在本文中,我们将着重讨论将原始数据转换为结构化数据处理中的所有数据预 ......
Python和PyTorch深入实现线性回归模型:一篇文章全面掌握基础机器学习技术
# 1. 简介 ## 1.1 线性回归模型概述 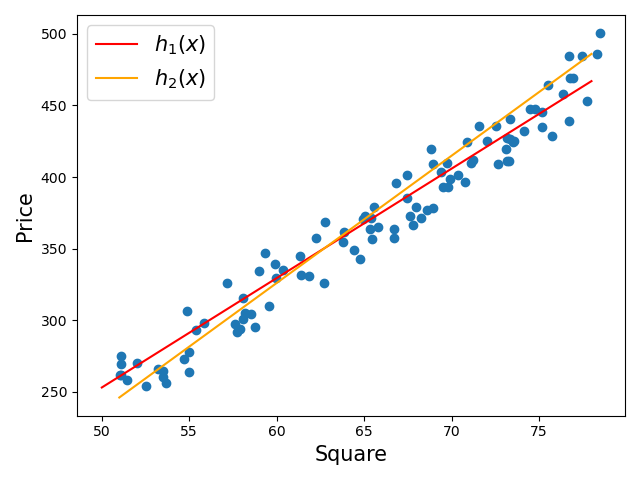 线性回归是一种统计学中的预测分析,该方法用于建立两种或两种以 ......
吴恩达机器学习笔记(四)
# 吴恩达机器学习笔记(四) ## bellman方程 $s$:当下所处的状态 $a$:在s状态下要采取的行动 $Q(s,a)$:在s状态下采用a行动后,所能获取的最大奖励 $R(s)$:在当前状态下所能获得的奖励 $\gamma$:折扣因子,在0到1之间 ![img](https://img202 ......