坐标系 坐标 机器人 机器
吴恩达机器学习笔记(二)
# 吴恩达机器学习笔记(二) # 决策树模型 ## 什么是决策树 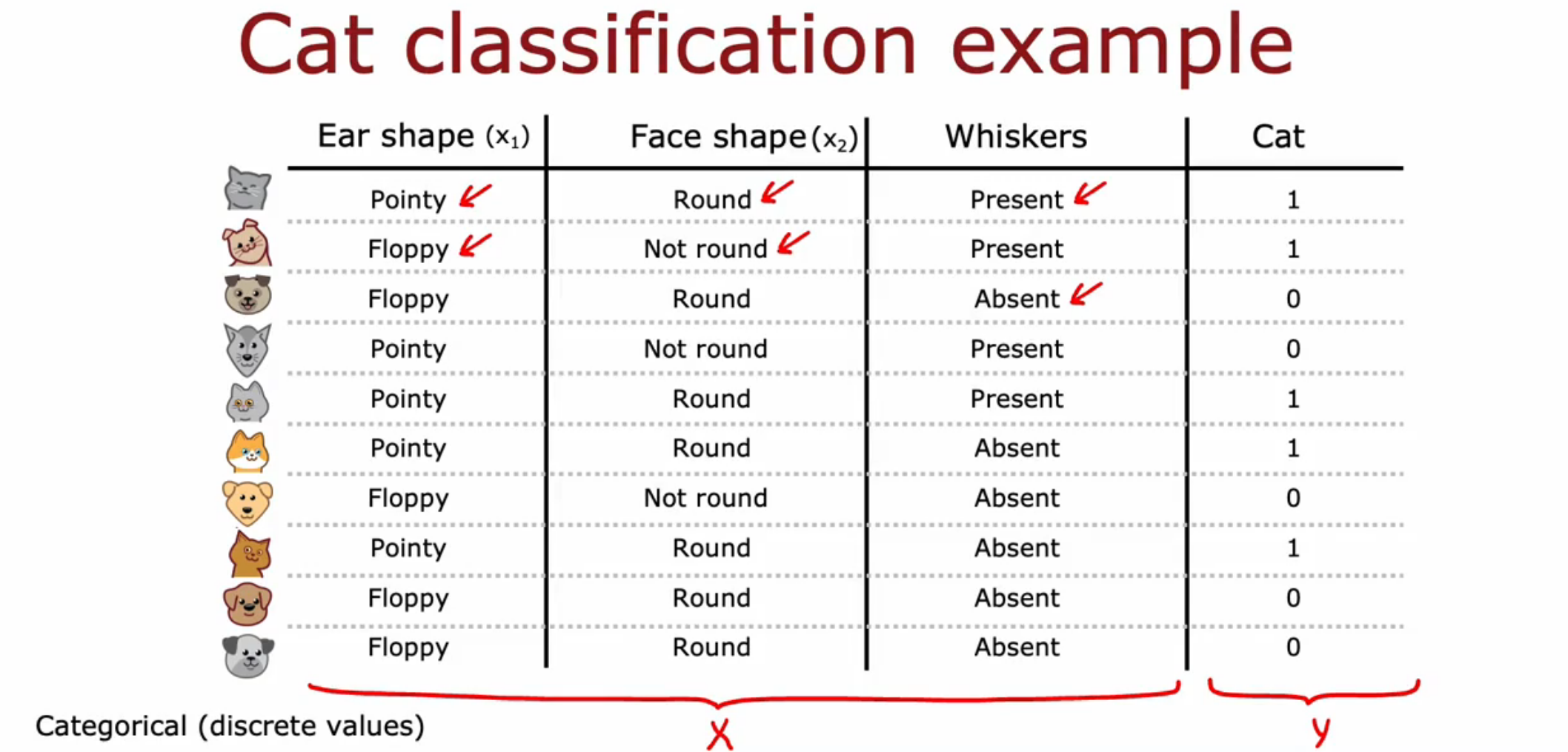 给定一组数据,如果想对数据进行分类或者回归 ......
吴恩达机器学习笔记(三)
# 吴恩达机器学习笔记(三) # K-means聚类 聚类算法用于一组没有标签的数据,将其分成不同的组。 K-means聚类算法一般做的是这两件事: - 将点分配到不同的聚簇上(根据与聚簇中心的距离) - 移动聚簇中心 直到聚簇中心不再变化为止。 ## 具体流程 对于$K$个聚簇,$m$个数据点,流 ......
吴恩达机器学习笔记(一)
# 吴恩达机器学习笔记(一) # 迁移学习 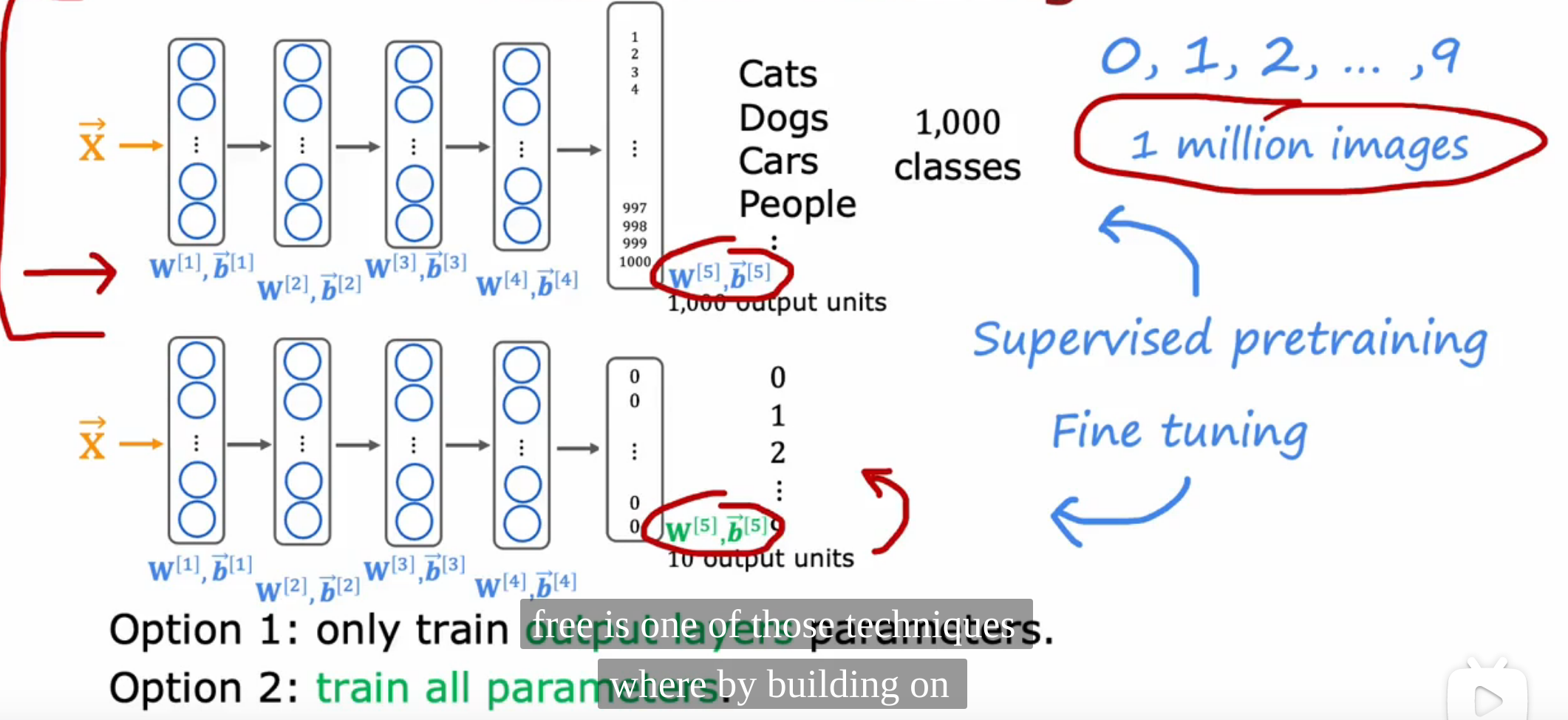 **解释:** 当需要训练小数据模型时,可以使用已经训练好的大 ......
关于个人微信的机器人开发
我们是一家专业服务企业数字化微信管理服务的技术服务团队,服务于需求SCRM、机器人、营销系统、社群小助手等具有研发能力的企业,同时我们也接收因使用Xp方案、ipad方案、PC方案导致被批量封号的企业,我们合作伙伴目前包含:金融服务行业Top10、国企事业单位、上市企业、知名淘客品牌、知名Xp企业、提 ......
机器学习中的几种交叉验证方法(5种)
> 参考自Kaggle大神approachingalmost的书籍[《Approaching (Almost) Any Machine Learning Problem》](https://github.com/abhishekkrthakur/approachingalmost/) ## 交叉验证 ......
9、教程-5 四轮机器人
本教程旨在从头开始创建您的第一个机器人。机器人将由一个身体、四个轮子和两个距离传感器组成。结果如图所示。下图显示了机器人的俯视图。tutorial_4_wheels_robot.png 四轮机器人的三维视图。请注意,机器人主体及其轮子的坐标系表示以相同的方式定向。它们的+x矢量(红色)定义机器人的左 ......
掌握Python最强大的机器学习库
[TOC] # UIE-X在医疗领域的实战 **PaddleNLP全新发布UIE-X 🧾,除已有纯文本抽取的全部功能外,新增文档抽取能力。** UIE-X延续UIE的思路,**基于跨模态布局增强预训练模型**[文心ERNIE-Layout](https://github.com/PaddlePad ......
OSG屏幕坐标转世界坐标
1 static osg::Matrix getScreenToWorldMatrix(osg::View *view) 2 { 3 return osg::Matrix::inverse(getWorldToScreenMatrix(view)); 4 } 5 6 static osg::Matr ......
Flutter如何实现Dart到iOS机器指令
Flutter 使用了自定义的编译工具链,称为 Flutter Engine,将 Dart 代码编译成 iOS 设备的机器指令。以下是 Flutter 在 iOS 上编译和链接的一些关键步骤和涉及的文件: 1. **编译步骤**: - Dart 代码编译:首先,Flutter 使用 Dart 编译器 ......
个微API开发,个人微信机器人
E云 是一套完整的的第三方服务平台,包含微信API服务、企微API服务、SCRM系统定制、企微系统定制、服务类软件定制等模块,本文档主要讲述个微API服务相关,以下简称API,它能处理用户微信中的各种事件,提供了开发者与个微对接的能力,技术上来讲是一款基于微信提供的个人开放性API,使用简单,操作快 ......
深入Scikit-learn:掌握Python最强大的机器学习库
> 本篇博客详细介绍了Python机器学习库Scikit-learn的使用方法和主要特性。内容涵盖了如何安装和配置Scikit-learn,Scikit-learn的主要特性,如何进行数据预处理,如何使用监督学习和无监督学习算法,以及如何评估模型和进行参数调优。本文旨在帮助读者深入理解Scikit- ......
5、开发环境-转移到自己的机器人上
一、转移到自己的机器人上 在移动机器人模拟中,将结果传递到真实的移动机器人上通常是有用的。Webots在设计时就考虑到了这种传输能力。仿真尽可能逼真,编程接口可以移植或连接到现有的真实机器人。Webots已经包括许多现有机器人的传输系统,包括e-puckTM、DARwIn OPTM、KheperaT ......
【升职加薪秘籍】我在服务监控方面的实践(3)-机器监控
>大家好,我是蓝胖子,关于性能分析的视频和文章我也大大小小出了有一二十篇了,算是已经有了一个系列,之前的代码已经上传到github.com/HobbyBear/performance-analyze,接下来这段时间我将在之前内容的基础上,结合自己在公司生产上构建监控系统的经验,详细的展示如何对线上服 ......
最新基于nonebot的qq机器人搭建
## 导读 #### 核心资源 ( 参考各项目到各自release下载 [NoneBot](https://nonebot.dev/)[简介 | go-cqhttp 帮助中心](https://docs.go-cqhttp.org/guide/#go-cqhttp)qq登录需要包签名,要自己部署 [ ......
实习微信机器人API开发
现在网络上资源聚集复杂,当我们想要实现一个功能时,我们已经没有必要像前辈们那样来进行繁重的造轮子的工作。目前,随着人教育体系的提高,培养出专业性人才,为解决繁重的工作带来质的飞越,也就是微信机器人的开发,帮我们抵抗了绝大部分繁重的压力。接下来向大家介绍的一所微信机器人其功能: 好友管理:添加好友、删 ......
机器翻译 | Improving Neural Machine Translation Robustness via Data Augmentation: Beyond Back Translation论文总结
论文地址:https://arxiv.org/abs/1910.03009 ### 动机 神经机器翻译(NMT)模型在翻译**干净文本**时已被证明是强大的,但它们**对输入中的噪声非常敏感**。改进NMT模型的鲁棒性可以看作是对噪声的“域”适应的一种形式。 最先进的方法严重依赖于大量的反向翻译数据 ......
ggplot中绘图修改坐标轴的范围
001、 ggplot(mpg, aes(displ, hwy)) + geom_point(aes(color = drv)) + coord_cartesian(xlim = c(5, 7), ylim = c(10, 30)) ## 设定x、y轴范围 002、 修改x轴范围 ggplot(mp ......
ggplot绘图修改离散坐标轴标签
001、 p <- ggplot(mpg, aes(x = drv)) + geom_bar() p ## 基础绘图 002、使用scale_x_discrete 选项修改离散标签名称 p + scale_x_discrete(labels = c("4" = " xxx ", "f" = " yy ......
ggplot绘图修改坐标轴刻度线的位置
001、 dat <- data.frame(a <- 1:20, b <- 1:20) p <- ggplot(data = dat, aes(x = a, y = b)) + geom_point() p ## 基础绘图 002、修改x轴刻度位置 p +scale_x_continuous(br ......
gcoord坐标转换插件
关键代码 ``` var gcj02Data = gcoord.transform(geoJsonObject, gcoord.WGS84, gcoord.GCJ02); ``` 具体见github https://github.com/hujiulong/gcoord ......
如何在3ds max中创建可用于真人场景的巨型机器人:第 1部分
在这个由多部分组成的教程系列中,我将逐步展示如何在 3ds Max 中制作巨型机器人。我将展开并将逼真的金属纹理和照明应用于机器人模型。 然后,它将使用 3ds Max 中的骨骼系统进行装配,之后我将对其进行动画处理。然后,真人动作镜头将在Boujou中跟踪,动画之后,我将在After Effect... ......
如何在3ds max中创建可用于真人场景的巨型机器人:第 3 部分
推荐:NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 创建腿部装备 步骤 1 打开 3ds Max。 打开在本教程最后一部分中保存的文件。 打开 3ds Max 步骤 2 转到创建> 系统并单击骨骼。 创建>系统 步骤 3 为的 侧视口中的腿,如下图所示。 画骨头 步骤 4 与顶骨 选 ......
如何在3ds max中创建可用于真人场景的巨型机器人:第 5 部分
推荐:NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. After Effects 中的项目设置 步骤 1 打开“后效”。 打开后效果 步骤 2 我有真人版 我在After Effects中导入的素材。这是将 用作与机器人动画合成的背景素材。 实景镜头 步骤 3 有背景 选定的素材图层, ......
机器学习——降维算法学习总结
# 降维算法学习 ## 一、PDA(主成分分析)算法 假设有n个m维向量,需要降到k维 PDA的目标是最大化组内方差,最小化组间协方差 步骤: 1. 中心化:计算这n个向量在每一个维度上的均值,得到m维的均值向量,再用每一个向量减去这个均值向量。 2. 计算这n个向量的协方差矩阵。 3. 提取协方差 ......
个人微信机器人,个微API开发
E云 是一套完整的的第三方服务平台,包含微信API服务、企微API服务、SCRM系统定制、企微系统定制、服务类软件定制等模块,本文档主要讲述个微API服务相关,以下简称API,它能处理用户微信中的各种事件,提供了开发者与个微对接的能力,技术上来讲是一款基于微信提供的个人开放性API,使用简单,操作快 ......
机器码、指令、汇编语⾔、⾼级语⾔
## ⼀、机器码 各种⽤**⼆进制**编码⽅式表⽰的指令,叫做机器指令码。最初,⼈们就⽤它编写程序,这就是机器语⾔。机器语⾔虽然能够被计算机接受和理解。⽤它编写的程序⼀经输⼊计算机,CPU直接读取运⾏,因此和其他语⾔编的程序相⽐,**执⾏速度最快**。但它和⼈类的语⾔差别巨⼤,不易被⼈类理解和记忆, ......
个微API开发,个微机器人开发
测试地址:https://wkteam.cn/ 简要描述: 获取我的二维码 请求URL: http://域名地址/getQrCode 请求方式: POST 请求头Headers: Content-Type:application/json Authorization:login接口返回 参数: 参数 ......
ROS2机器人导航Nav2超详细保姆级教程之四大服务器
导航服务器 规划器和控制器是导航任务的核心。恢复器用于使机器人摆脱不良状态或尝试处理各种形式的问题,以使系统具有容错能力。平滑器可用于进一步提高规划路径的质量。在本节中,将分析有关它们的一般概念及其在Nav2项目中的用途。 规划器、恢复器、平滑器和控制器服务器。 Nav2中的四个动作服务器是规划器、 ......
QT——vtk显示坐标轴
使用VTK中的vtkAxesActor和vtkOrientationMarkerWidget在左下角显示坐标轴,捣鼓了一天,才整成。 ``` renWin_ = vtkSmartPointer::New(); this->SetRenderWindow(renWin_); renderer_ = v ......
初识机器学习及机器学习线性拟合的实现
从最小二乘法到机器学习 1,什么是机器学习? 机器学习有下⾯⼏种定义: 机器学习是⼀⻔⼈⼯智能的科学,该领域的主要研究对象是⼈⼯智能,特别是如何在经验学习 中改善具体算法的性能。 机器学习是对能通过经验⾃动改进的计算机算法的研究。 机器学习是⽤数据或以往的经验,以此优化计算机程序的性能标准。 2,最 ......