寄存器imu
vim的寄存器
以前就觉得vim里复制的内容好像粘贴不出来, 就觉得这个软件真是隔路, 剪贴板都不同用, 今天查了一下才发现原来人家是功能更强大的关系. 一下是一则知乎回答的引用 刚刚测试又发现正常复制就能粘贴出来......记忆错乱 作者:右耳朵猫(whinc) 链接:https://www.zhihu.com/ ......
STM32使用寄存器实现点灯操作
1.配置RCC_APB2ENR(见参考手册7.3.7) 2.配置GPIOC_CRH(见参考手册8.2.2) 3.配置GPIOC_ODR(见参考手册8.2.4) ``` #include "stm32f10x.h" // Device header int main(void) { RCC->APB2 ......
STM32H7 I2C主机读数据【寄存器操作】
I2C初始化 /* I2C2 init function */ void MX_I2C2_Init(void) { /* USER CODE BEGIN I2C2_Init 0 */ /* USER CODE END I2C2_Init 0 */ LL_I2C_InitTypeDef I2C_Ini ......
vim正则寄存器中存换行符的坑点
想要把多行字符复制为关键字,用于搜索,统计次数, 复制到寄存器之前回车是\n, 用/搜索验证ok的 复制到寄存器后取出来后变成了^M符号, 需要替换两次消除 ```vimscript =substitute(substitute(@a,'\r','','g'),'\n','\\n','g') ``` ......
图像和IMU数据与rosbag互转
1. 图像和IMU数据-->rosbag kalibr_bagcreater --folder /home/xue/桌面/cali/storage06011455/. --output-bag camimu.bag 2. rosbag-->图像和IMU数据 kalibr_bagextractor - ......
计组(二)寄存器传输级微操作流程
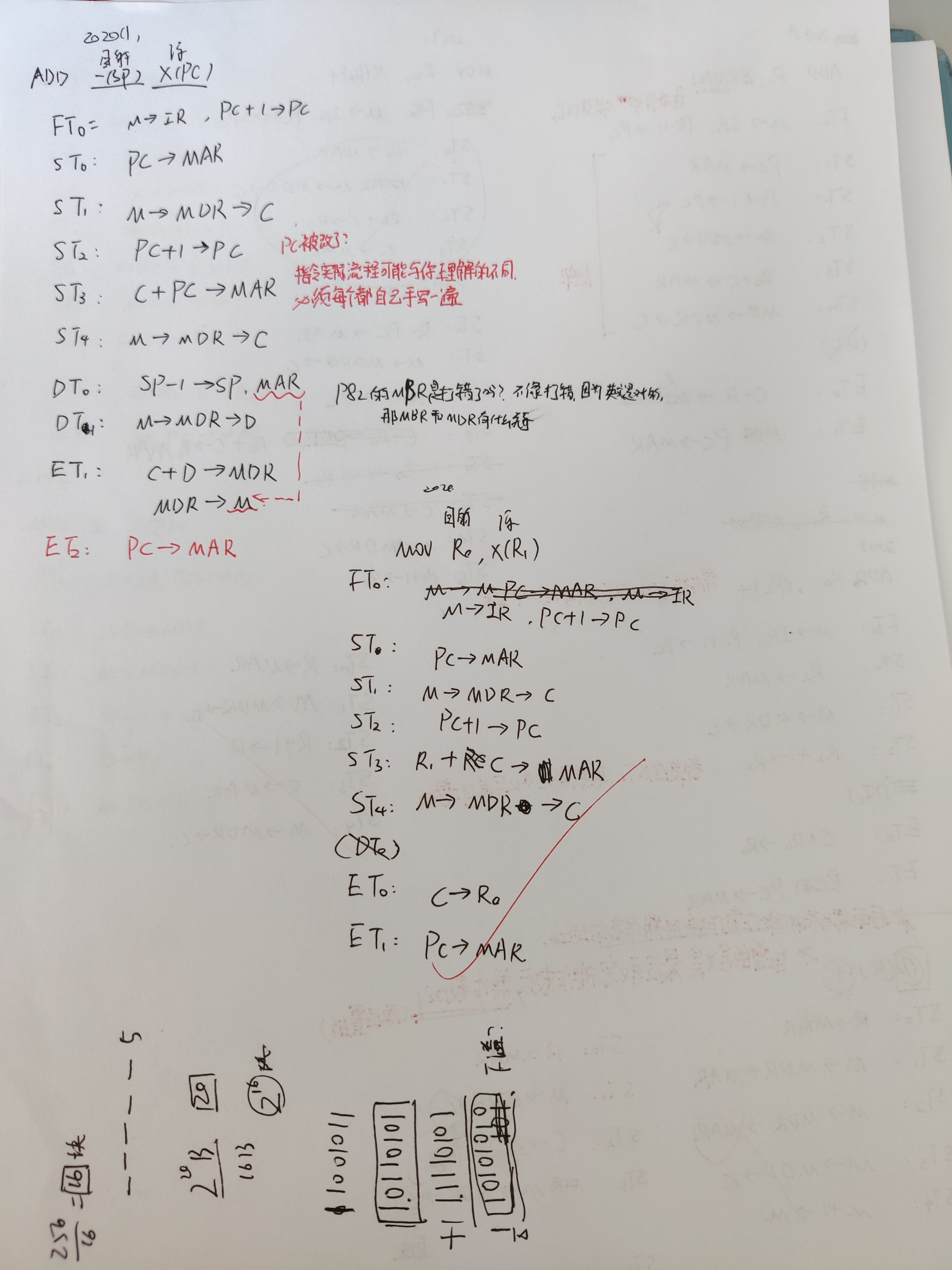 上升沿或者是下降沿作用下 ......
[hc32f460填坑] DMA寄存器通过位段访问的值与实际寄存器值不一样
我的芯片型号是hc32f460jeua,使用的库为HC32F460_DDL_Rev3.1.0,keil包为HDSC.HC32F460.1.0.10。 发现问题:使用DMA中断,中断向量方法三(32个中断源共享一个中断向量),库的hc32f460_ll_interrupts_share.c文件中都用的 ......
汇编-寄存器
8086CPU有14个寄存器: AX BX CX DX SI DI SP BP IP CS SS DS ES PSW 8086CPU所有的寄存器都是16位的,可以存放两个字节 ......
IMU 积分进行航迹推算
# IMU 积分进行航迹推算 > **Reference** [https://github.com/gaoxiang12/slam_in_autonomous_driving](https://github.com/gaoxiang12/slam_in_autonomous_driving) ## ......
RISC-V寄存器
RISC-V 指令集的模块化和寄存器结构 https://www.cnblogs.com/wzx19970918/p/15728989.html#:~:text=RISC-V%20%E6%8C%87%E4%BB%A4%E9%9B%86%E6%9E%B6%E6%9E%84%E5%85%B7%E6%9C ......
X86寄存器
第17章-x86-64寄存器 https://www.cnblogs.com/mazhimazhi/p/15236954.html 浮点寄存器概述 https://www.iteye.com/blog/aisxyz-2440913 ......
[PLC]三菱FX5U WORKS3中使用特殊继电器/特殊寄存器注释显示
1.菜单栏"视图"-->"多个注释"-->"注释读取"2.勾选如图所示:3.点击确定,例如sm412这种特殊继电器/特殊寄存器就会自动显示注释. ......
imu 话题数据,欧拉角
header: 消息头,包含序列号、时间戳和坐标系等信息。 orientation: IMU 的当前朝向,用四元数表示,包括 $x, y, z$ 和 $w$ 四个值。 orientation_covariance: 朝向协方差矩阵,包含 $9$ 个元素,描述 IMU 测量的朝向误差。 angular ......
贴个IIC的代码和MPU6050寄存器地址的文档(MOVE版)
IIC代码: /* UV_SDA_SET() UV_SDA_RESET() UV_SCL_SET() UV_SCL_RESET() UV_Delay() */ /** *\filename IIC communication protocol example\IIC通信协议举例 *\author * ......
realsense d435i获取imu数据
#!/usr/bin/python from __future__ import print_function import numpy as np import sys import json import ctypes import os import binascii import struc ......
通用寄存器
参考资料: L-1.3:Various General Purpose Registers in Computer Organization and Architecture - YouTube 数据寄存器(data register) 意味着临时存储数据的地方,大小一般是一个字(word) 累加寄 ......
python 串口读取IMU
# coding:UTF-8 # Version: V1.0.1 import serial ACCData = [0.0]*8 GYROData = [0.0]*8 AngleData = [0.0]*8 FrameState = 0 # What is the state of the judg ......
【论文】Range-Focused Fusion of Camera-IMU-UWB for Accurate and Drift-Reduced Localization
## Abstract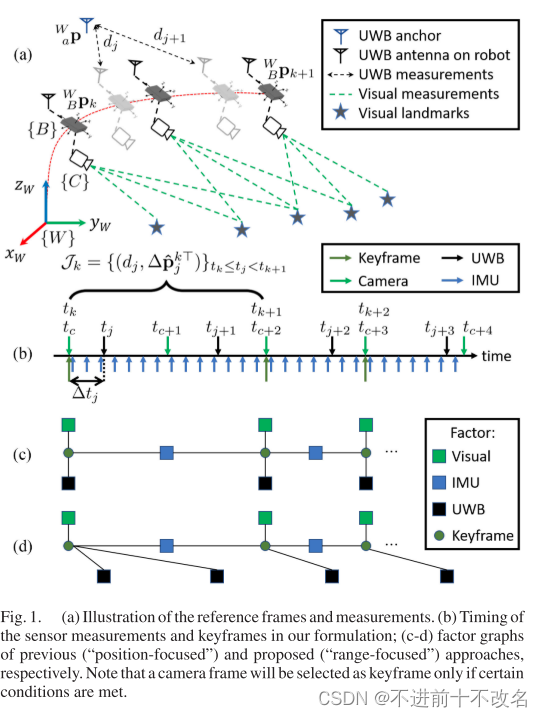## I. INTRODUCTION为什么需要添加UWB?因为传统的VIO会由于传感器的噪声和计算误差产生累计偏移。所以需要G ......
C# ModBus中寄存器和功能码
四. 寄存器和功能码 modbus的功能码很多,且不同功能码对应的报文也不一致,后续博客我会借用开源库实现一个modbus master 测试功能码 解析报文 下边我用表格总结一下寄存器,功能码,报文格式 注: (1)报文中的所有字节均为16进制 (2)由上图我们总结出不同的功能码的报文(无论询问报 ......
IMU和GPS ekf融合定位 从matlab到c++代码实现
IMU和GPS ekf融合定位 从matlab到c++代码实现基于位姿状态方程,松耦合文档原创且详细 YID:6745659043907933 ......
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前?
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前提下,根据GNSS/GPS的定位信息与IMU信息完成IMU到GNSS/GPS 的外参标定,并进一步获得IMU到车体坐标系的外参标定。本商品提供两种标定模式:车辆直线运动及自由运动,这两种模 ......
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代?
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代码优化,从数据接收到闭环检测到图优化,非常完整。 该商品与本人发布的“激光SLAM之多传感器融合定位”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地项目,里面 ......
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,里面还增加了工程应用角度的代码优化,配置解析文档也非常完整。该商品与本人发布的“激光SLAM之激光雷达+IMU建图”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地 ......
IMU and GPS Fusion for Inertial Navigation Label: Research
转载自IMU and GPS Fusion for Inertial Navigation This example shows how you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicl ......
【驱动】以太网扫盲(二)phy寄存器简介
PHY 寄存器的地址空间为 5 位,从 0 到 31 最多可以定义 32 个寄存器(随着芯片功能不断增加,很多 PHY 芯片采用分页技术来扩展地址空间以定义更多的寄存器),IEEE802.3 定义了地址为 0-15 这 16 个寄存器的功能,地址16 - 31的寄存器留给芯片制造商自由定义,如下表所 ......