IMU
ORB-SLAM3中IMU初始化
ORB-SLAM3中IMU初始化由LocalMapping线程中的InitializeIMU函数完成。 主要是完成重力方向\(R_{wg}\)和尺度scale的估算,总共进行三次。 InitializeIMU函数包含两部分:InertialOptimization 和 FullInertialBA ......
IMU eskf使用
2.1 关于IMU测量数据在聊到IMU测量数据的时候,我们首先需要明白两个坐标系的定义。 一是惯性系,二是IMU坐标系。 这里的惯性系就是指静止或者其速度的改变可以忽略不记的坐标系。通常在机器人的应用中,由于所用的IMU都是低成本IMU,对于地球自转角速度不够敏感,所以可以认为与地面固连的坐标系都是 ......
基于uwb和IMU融合的三维空间定位算法matlab仿真
1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.算法理论概述 基于UWB和IMU融合的三维空间定位算法是一个结合了无线脉冲波(UWB)和惯性测量单元(IMU)各自优势的定位方法。UWB通过测量信号的传输时间来计算距离,具有精度高、抗干扰能力强等优点,但易受多径效应和环境噪声 ......
kalibr相机标定和IMU标定
相机标定 打印标定板和对应的aprilgrid.yaml target_type: 'aprilgrid' #gridtype tagCols: 6 #number of apriltags tagRows: 6 #number of apriltags tagSize: 0.038 #size o ......
IMU寄存器配置说明
在使用IMU前需要先通过寄存器配置IMU的量程(range)和数据输出频率(ODR)等信息,下面简单说一下如何计算寄存器中对应参数的值。 以TDK 的一款MEMS IMU的Gyro为例:假设 range 配置为:250deg/s,ODR配置为:200HZ 其实就是计算一个8位的二进制的数 XXXX ......
VINS中的IMU因子(一)
VINS中的IMU因子(一) 在这篇文章中我们分析一些VINS中对于IMU因子的处理和构建方式。首先来看一下再 estimator类中关于预积分因子的几个重要成员变量。pre_integrations 存储了滑动窗口中相邻两帧之间的预积分增量。acc_0,gyr_0则保存了当前时刻的角速度和加速度值 ......
IMU 内参标定
标定的本质是参数辨识,参数包括陀螺仪和加速度计各自的零偏、刻度系数误差、安装误差。 IMU的内参标定:通过特定的方法找出生产工艺引起的误差,并把他们量化,最终将数据校正。 相关资料: 1. [IMU 内参标定](https://xiaotaoguo.com/p/imu-calibration/); ......
通过 IMU 绘制物体移动的空间轨迹
# 通过 IMU 绘制物体移动的空间轨迹 一般 IMU 由加速度传感器、陀螺仪组成,也叫 6 轴 IMU。还可以外加一个磁力计,构成 9 轴 IMU。关于加速度传感器和陀螺仪的工作原理,可以参考: 1. [加速度传感器的原理和应用-手机翻转、失重检测、运动检测、位置识别](https://blog. ......
5、Error-state kinematics for IMU-driven systems
IMU驱动系统的误差状态运动学 5.1 动机 我们希望使用Hamilton四元素表示空间方位或姿态,将具有偏置和噪声读数的加速度计和陀螺仪进行积分,实现惯性系统运动学的误差状态方程。 加速度计和陀螺仪的读数通常来自惯性测量单元(IMU)。将IMU读数积分会导致随时间漂移的惯性导航定位系统。避免漂移的 ......
6、Fusing IMU with complementary sensory data
将惯性测量单元与补充传感器数据融合 当接收到除IMU之外的其他信息,例如GPS或视觉信息时,对ESKF进行校正。在一个设计良好的系统中,这应该使惯性测量单元的偏差可观测,并允许ESKF正确地估计它。有许多可能性,最流行的是GPS+IMU、单目视觉+IMU、立体视觉+IMU。近年来,视觉传感器与IMU ......
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合
IMU和GPS ekf融合定位 从matlab到c++代码实现基于位姿状态方程,松耦合文档原创且详细这段代码是一个数据融合程序,主要用于将GPS和IMU(惯性测量单元)数据进行融合,以估计车辆的位置和姿态。下面我将对代码进行详细的解释和分析。首先,代码使用了MATLAB的一些函数和工具箱来进行数据处 ......
图像和IMU数据与rosbag互转
1. 图像和IMU数据-->rosbag kalibr_bagcreater --folder /home/xue/桌面/cali/storage06011455/. --output-bag camimu.bag 2. rosbag-->图像和IMU数据 kalibr_bagextractor - ......
realsense d435i获取 imu数据
import pyrealsense2.pyrealsense2 as rs import configparser import numpy as np import time import csv import cv2 config_pro = configparser.ConfigParser ......
IMU 积分进行航迹推算
# IMU 积分进行航迹推算 > **Reference** [https://github.com/gaoxiang12/slam_in_autonomous_driving](https://github.com/gaoxiang12/slam_in_autonomous_driving) ## ......
imu 话题数据,欧拉角
header: 消息头,包含序列号、时间戳和坐标系等信息。 orientation: IMU 的当前朝向,用四元数表示,包括 $x, y, z$ 和 $w$ 四个值。 orientation_covariance: 朝向协方差矩阵,包含 $9$ 个元素,描述 IMU 测量的朝向误差。 angular ......
realsense d435i获取imu数据
#!/usr/bin/python from __future__ import print_function import numpy as np import sys import json import ctypes import os import binascii import struc ......
python 串口读取IMU
# coding:UTF-8 # Version: V1.0.1 import serial ACCData = [0.0]*8 GYROData = [0.0]*8 AngleData = [0.0]*8 FrameState = 0 # What is the state of the judg ......
【论文】Range-Focused Fusion of Camera-IMU-UWB for Accurate and Drift-Reduced Localization
## Abstract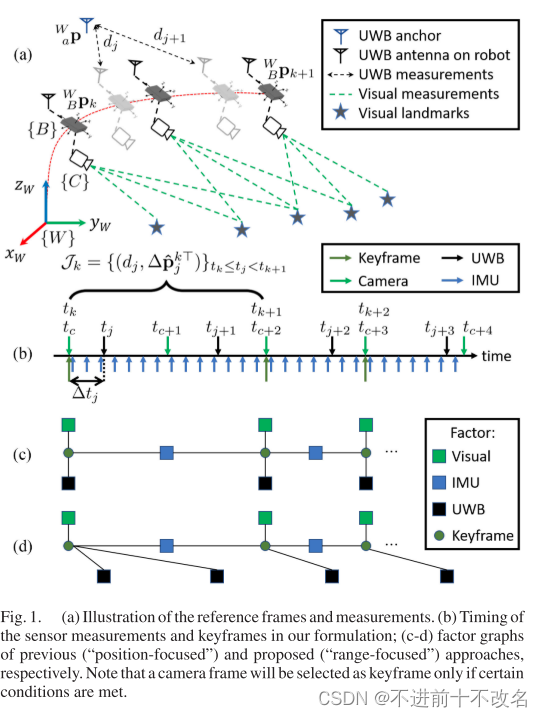## I. INTRODUCTION为什么需要添加UWB?因为传统的VIO会由于传感器的噪声和计算误差产生累计偏移。所以需要G ......
IMU和GPS ekf融合定位 从matlab到c++代码实现
IMU和GPS ekf融合定位 从matlab到c++代码实现基于位姿状态方程,松耦合文档原创且详细 YID:6745659043907933 ......
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前?
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前提下,根据GNSS/GPS的定位信息与IMU信息完成IMU到GNSS/GPS 的外参标定,并进一步获得IMU到车体坐标系的外参标定。本商品提供两种标定模式:车辆直线运动及自由运动,这两种模 ......
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代?
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代码优化,从数据接收到闭环检测到图优化,非常完整。 该商品与本人发布的“激光SLAM之多传感器融合定位”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地项目,里面 ......
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,里面还增加了工程应用角度的代码优化,配置解析文档也非常完整。该商品与本人发布的“激光SLAM之激光雷达+IMU建图”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地 ......
IMU and GPS Fusion for Inertial Navigation Label: Research
转载自IMU and GPS Fusion for Inertial Navigation This example shows how you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicl ......
什么是imu
IMU是惯性测量单元(Inertial Measurement Unit)的缩写 是测量物体三轴姿态角(或角速率)及加速度的装置 陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。 ......
皇家理工学院提出无需里程计,仅IMU实现在线多激光雷达标定方案!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容 点击领取学习资料 → 机器人SLAM学习资料大礼包 #论文# IMU-based online multi-lidar calibration without lidar odometry 论文地址:https://arxiv.org/ab ......