激光 特性 之间
Calico IPIP模式下的Cross Subnet特性分析
Calico-ipip模式和calico-bgp模式都有对应的局限性,对于一些主机跨子网而又无法使网络设备使用BGP的场景可以使用cross-subnet模式,实现同子网机器使用calico-BGP模式,跨子网机器使用calico-ipip模式。 ......
MyBatis中获取参数值的两种方式:${} 和 #{},以及它们之间区别是什么?
MyBatis中获取参数值的两种方式:${} 和 #{},以及它们之间区别是什么?
${}:的本质就是字符串拼接 #{}:的本质就是占位符赋值 ......
Jmeter —— 接口之间关联调用(获取上一个接口的返回值作为下一个接口的请求参数)
正则表达式: 具体如何操作: 1. 草稿保存, 此请求的响应数据的id 为发布总结的请求参数draft_id 2. 草稿保存的响应数据 3.在草稿保存的请求中,添加后置处理器- 正则表达式提取器, 提取响应数据的id信息 4. 发布总结请求中, 填写请求参数 5.最终, 可正常发布 最后如果你想学习 ......
关于激光雷达:机械式、半固态、固态的简单总结
根据扫描的方式,分为 机械式、半固态(混合固态)和固态三种。 半固态可以分为一维扫描和二维扫描; 固态激光雷达有OPA(相控阵)和Flash(泛光面阵式)。 机械式激光雷达:通过电机带动光机结构整体 360° 旋转。是最经典且最为成熟的激光方案。但是利用传统分立式设计的机械雷达体积大且降本空间有限, ......
JS 日期与毫秒之间互相转换
时间戳(Unix/Linux timestamp)转换工具—在线转换毫秒时间戳工具 (toolscat.com) Date()函数:该方法返回日期的毫秒表示(毫秒数精确到毫秒) 1. 毫秒转日期: // 2023-3-25 格式 new Date(1679673600000).toLocaleDat ......
JAVA基础 | JAVA特性和优势
一、JAVA帝国的诞生 二、JAVA的特性和优势 1.简单性 没有头文件,没有指针运算,也不用去分配内存,语法基于C,是JAVA的简易版; 2.面向对象 模拟的是人的思维,万物皆对象; 3.可移植性 一次编写,到处运行(write once,run anywhere); 4.高性能 即时编译; 5. ......
docker 主机和容器之间的拷贝
要在 Docker 容器和主机之间进行文件拷贝,可以使用 docker cp 命令。下面是一些示例用法: 从主机拷贝文件到容器: docker cp /path/to/local/file.txt container_name:/path/in/container/file.txt 从容器拷贝文件到 ......
在比对操作中,要找出第二代短读段与第三代长读段之间的高准确度比对结果
在比对操作中,要找出第二代短读段与第三代长读段之间的高准确度比对结果,可以采用以下方法: 1. 使用第二代测序数据对第三代长读段进行纠错。例如,Lo RDEC算法通过构建简洁de Bruijn图来寻找纠错序列,从而实现纠正第三代长读段数据中的错误区域[16]。 2. 基于比对的方法。例如,LSC算法 ......
C#版本与.NET版本对应关系以及各版本的特性
C#版本与.NET版本对应关系以及各版本的特性 C#版本.NET版本发布日期特性 C# 1.0 .NET Framework 1.0 2002-02-13 委托、事件 C# 1.1 .NET Framework 1.1 2003-04-24 APM(异步编程模型) C# 2.0 .NET Frame ......
Cesium中的空间直角坐标系、经纬度、弧度之间的转换
<!DOCTYPE html> <head> <title>Hello World</title> <script src="../Build/Cesium/Cesium.js"></script> <link href="../Build/Cesium/Widgets/widgets.css" r ......
利用学习改进雷达和激光雷达之间的外在特性
利用学习改进雷达和激光雷达之间的外在特性 摘要——激光雷达和雷达是自动驾驶系统中常用的两种传感器。二者之间的外在校准对于有效的传感器融合至关重要。这一挑战是由于雷达测量中的低精度和稀疏信息而产生的。本文介绍了一种在自主系统中进行三维雷达激光雷达校准的新解决方案。该方法采用简单的目标生成数据,包括对应 ......
固态激光雷达的几何模型及标定方法(续)
固态激光雷达的几何模型及标定方法(续) 校准方法 由于背反射脉冲的强度也可以测量,所以从现在起将扫描光学器件的一个帧视为一个图像。通过这种方法,每个扫描方向都成为它的一个像素,如图3所示。理想情况下,从一个像素到下一个像素的角分辨率Δ𝜃将在整个FOV中保持不变,因此视角𝜃𝐻和𝜃𝑉对于在行和 ......
Python JSON格式字符串与对象之间的转换多种方法
1、json.dumps() 和 json.loads() 方法 使用 json.dumps() 方法将 Python 对象转换为 JSON 格式字符串。 使用 json.loads() 方法将 JSON 格式字符串解析为 Python 对象。 使用示例:Python JSON格式字符串与对象之 ......
【转载】JAVA 百度坐标,火星坐标和WGS84之间互转
原出处:https://www.cnblogs.com/Fooo/p/16986453.html /** * a */ public final static double a = 6378245.0; /** * ee */ public final static double ee = 0.00 ......
固体激光雷达的几何模型及标定方法
固体激光雷达的几何模型及标定方法 对具有可变角分辨率的固态激光雷达扫描系统进行几何描述,提出了一种新的校准方法。在系统的整个视场上确定这种失真,会产生准确和精确的测量结果,从而使其能够与其他传感器相结合。一方面,几何模型是使用众所周知的Snell定律和系统的固有光学组件来建立的,而另一方面,通过将像 ......
c#计算 坐标点与坐标点之间的距离
PointF p = new PointF(116.305671f, 39.966051f); PointF p2 = new PointF(116.595428f, 39.828327f); double value = Math.Sqrt(Math.Abs(p.X - p2.X) * Math. ......
激光雷达相机校准器入门
激光雷达相机校准器入门 激光雷达相机校准器应用程序,能够通过估计激光雷达传感器和相机之间的刚性变换,在它们之间交互执行校准。 本主题展示激光雷达相机校准器应用程序的工作流程,以及可用于分析和改进结果的功能。校准过程的第一个也是最重要的部分是获得准确和有用的数据。有关获取数据的指南和提示,请参阅校准指 ......
使用OCCT构建两个面之间的最短路径
查找两个面之间的最短面路径 查找面的邻面。 std::vector<TopoDS_Face> OCCTUtility::adjacentFace(TopoDS_Face const &face, std::optional<TopoDS_Shape> shape, std::optional<Top ......
域控服务器断电维护后,导致备域和主域之间复制不同步
业务环境中主域控服务器断电关机,更换了一块阵列卡电池,拆机更换 现象:重启后发现,域控管理下的所有服务器和主机时间重置从0开始,手动设置时间 同时域控复制服务不成功,主域和备域各自为战,互相是主域控服务器,并且在服务器管理器-工具-管理中心显示与其他域控不联机 用 dcdiag 和 dcdiag - ......
Python中强大的动态类型特性,以方法调用为例
在研究大佬的项目时,从一行行代码溯源,拨茧抽丝的过程中,发现了方法调用的“神奇之处” 具体情况如下: 1. 在类Trainer中名为run等方法中有加载预训练好的模型的load方法 2. load()方法依旧是类方法中的一个,在load方法中有具体的load_self()方法 3. load_sel ......
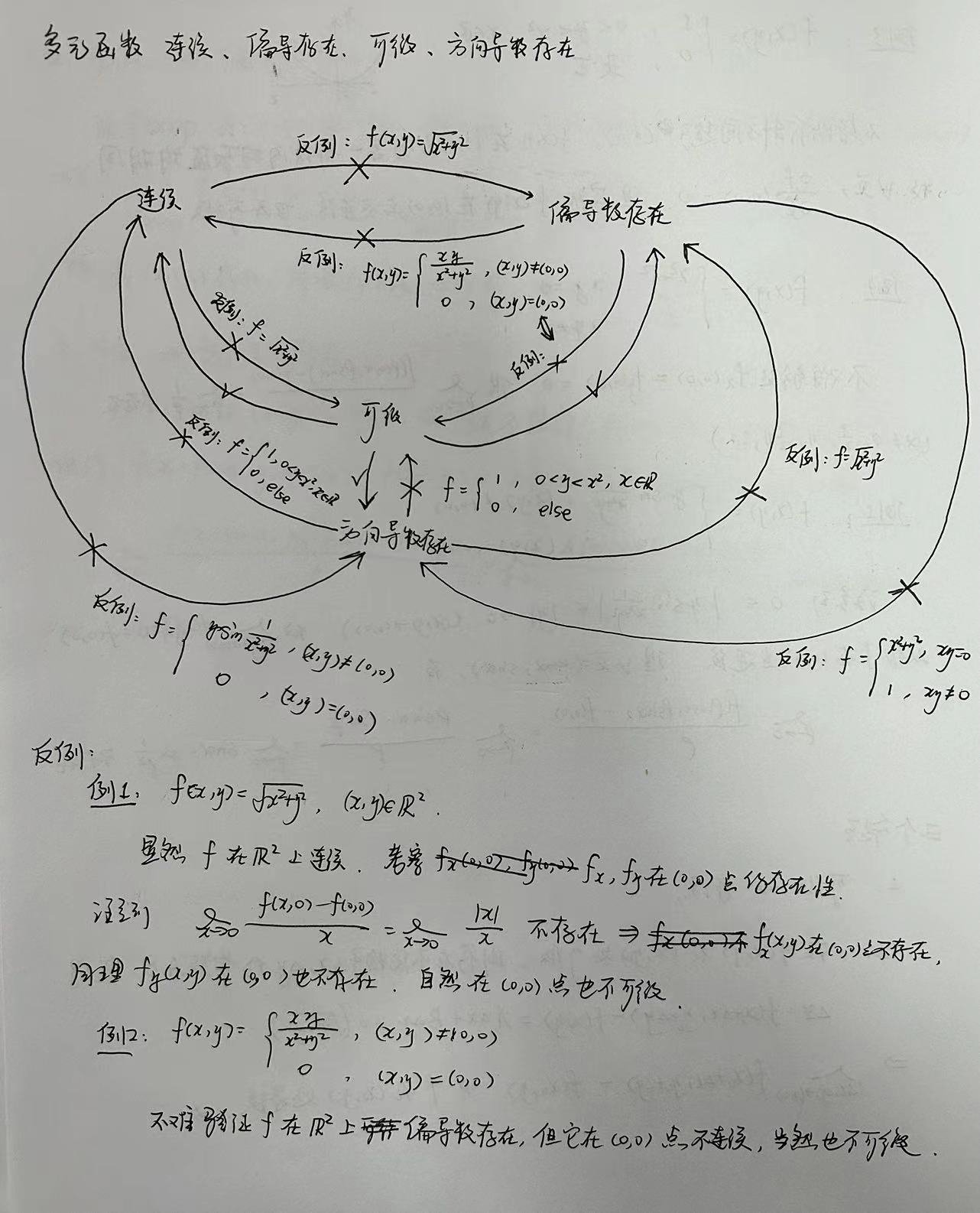
连续、偏导数存在、可微、方向导数存在之间的关系
 ; 2、fprintf是将格式化数据写入到指定文件流中; int fprintf(FILE *stream, const char *format, ...); 3、 ......
如何在 ASP.NET Core 中使用 Route 特性
ASP.NET Core 中的 Route 中间件的职责在于将 request 匹配到各自 Route 处理程序上,Route 分两种:基于约定 和 基本特性 模式。 基于约定 模式的Route采用集中化的方式,而 基于特性 的方式允许你在 Action 或者 Controller 上单独定义,到底 ......
【面试官版】【持续更新中】融合滤波算法+数据结构+激光视觉SLAM+C++面试题汇总
C++部分 什么时候需要写虚函数、什么时候需要写纯虚函数? 只继承接口为纯虚函数 强调覆盖父类重写,或者父类也需要实现一定的功能,为虚函数 指针传参和引用传参区别? 引用传参本质上是传递原参数地址,指针传参本质还是值传递,生成拷贝指针,拷贝指针和原指针指向的为同一块内存。因此改变拷贝指针的指向不影响 ......
什么是===运算符?说明“==”和“===”之间的区别?
被称为严格等式运算符,当两个操作数具有相同的值而没有任何类型转换时,该运算符返回true。==仅检查值相等,而 是一个更严格的等式判定,如果两个变量的值或类型不同,则返回false。 ......
专业、便捷的跨网文件摆渡产品,需要具备哪些功能特性?
为了确保内部核心资产的安全性,很多企业和机构都会选择将网络进行隔离划分,比如内外网隔离,办公网、研发网隔离等。但网络隔离后,在日常工作中,仍存在用户需求把文件数据从内网到外网,从办公网到研发网终端的文件摆渡业务需求。 很多企业都会使用一些传输工具和方式,进行文件摆渡传输。主流的几种方式如下: 1、双 ......
变压器到用电器之间的电线上鼓起的包有什么作用?
变压器到用电器之间的电线上鼓起的包有什么作用? 稳定电压或稳定电流或消除磁性,而加装在电路中的特殊器件,就是看见的包 用磁铁去惹金属中的电子,就能得到电 用得到的电去做一个方框形状的电磁铁,这个电磁铁的两极是不停转换的 原因是输入的电是交流电 方框形电磁铁的别一边可以绕上电线 由于这个电磁铁的磁极是 ......
C# 10 完整特性介绍
C# 10 完整特性介绍 hez2010 coreclr contributor 关注他 你经常看 C# 话题的内容 前言 距离上次介绍 C# 10 的特性已经有一段时间了,伴随着 .NET 6 的开发进入尾声,C# 10 最终的特性也终于敲定了。总的来说 C# 10 的更新内容很多,并且对类型系 ......
JDK版本特性(三)JDK9
JDK9新特性 概述 java9提供了近150项新功能,包括: 模块化系统 jShell命令 多版本兼容jar包 接口的私有方法 钻石操作符的升级使用 语法改进:try String存储结构 集合特性:of() 增强streamAPI 全新HTTP客户端API Deprecated的相关API ......
JDK版本特性(二)StreamAPI
Stream API 1 概述 Stream是java8中处理集合的关键抽象概念 它可以指定对集合进行的操作,比如执行肥非常复杂的查找、过滤和映射等操作 还可以使用Steam API来进行并行操作 2 Steam实例化 2.1 集合创建 实现自接口collection.stream() @Tes ......