旋翼 多面体 障碍物 飞行器
双箭头解决四面体问题
更简单,更易学,虽国考较少江苏较多,但仍需做好掌握! # 1、移面法  180°移面,记住即可。 # 2、双箭头 ......
一种开源共轴双旋翼无人机平台
一种开源共轴双旋翼无人机平台 https://github.com/sealevelrise/Tdrone 近年来多旋翼这种气动布局的飞行器大量应用于消费级无人机和一些特殊行业应用。这使很多人把能悬停的飞行器和多旋翼直接画上了等号,而忽略了其他可以悬停的气动布局的潜力。我并不是否定市场的选择,而是希 ......
MyBatis之执行器(Excutor)
# MyBatis之执行器(Executor) 前面的文章已经介绍了MyBatis的基本使用流程,但我们不能仅仅局限于使用,而是应该去横向扩展,往更深的方向研究。今天就先讲解一下MyBatis中的执行器Executor。 我们在CURD的时候,每次都会去获取一个新的SqlSession对象, ![] ......
移面法+双箭头法解决所有六面体问题
没看错,是所有!比相邻面法和公共点也许会快一些~ # 1、移面法 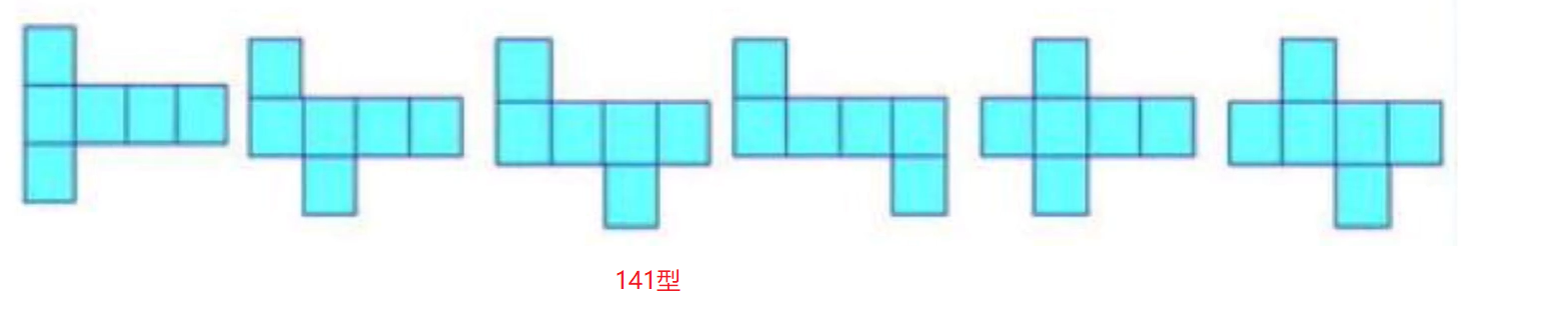  查看测评数据信息 一只蚂蚁从点A出发,每次行动可沿四面体的边来到另外一个点。问n次行动后,蚂蚁回到点A有多少种方法。 输入格式 一行,一个整数n。1 ≤ n ≤ 10^6 输出格式 你的答案除以1 000 000 007的余数。 输入/输出例子1 输入: 2 输出: 3 样例解 ......
FreeCodeCamp-通过编写小测验学习无障碍
index.html <!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8" /> <meta name="viewport" content="width=device-width, initial-scale=1.0" /> < ......
您在飞行程序设计时使用哪种软件?
最近填了一份调查问卷,里面提到飞行程序设计时所使用的软件,除了CAD之外,我很想说我用自己写的插件。 我用自己写的插件,并不是因为这个插件有多么完美,而是因为,通过插件的开发,可以实现个人经验的积累,在可控的精准度下,提高工作效率,并尝试更多的可能性。 苏世民《我的经验与教训》中提到“做大事和做小事 ......
火箭飞行阶段
动力飞行段,主动段,发动机和控制系统工作 无动力飞行段,被动段,发动机和控制系统不工作 自由飞行段,自由段,真空段,空气动力很小。在相当稀薄的大气中飞行,空气动力完全可以略去,即认为在真空中飞行。 再入大气层飞行段,再入段,空气动力很大。重新进入稠密大气层的一段弹道。由于大气对弹头的作用不仅使弹头承 ......
Cloud集群模式XXL-job开启自动注册执行器
在微服务架构下,传统的spring task、Quartz已经不再推荐使用, 在数据与业务增长的同时,定时任务处理数据是避免不了的,抛开单节点不谈,集群服务如果想要执行以往的定时任务最简单粗暴的方式就是使用分布式锁来保证唯一性,但是由于不可控原因,可能在执行任务期间所以压力集中到其中一个节点,所以这 ......
在不可预测的时代领导:超越中层管理障碍
“人到中年”何去何从? 大疫三年,很多人的工作生活面临了极大的改变。尤其是曾经在各外企、大厂任中高管的朋友们,他(她)们受到的冲击比较大,不论是工作还是生活上。 有些人因为公司战略或者业务结构调整被失业,有些人因为不满长期996,生活时间空间被挤压决定主动换个活法。 不管承不承认,不论主动被动,到了 ......
【源码分析】XXL-JOB的执行器的注册流程
目的:分析xxl-job执行器的注册过程 流程: 获取执行器中所有被注解(@xxlJjob)修饰的handler 执行器注册过程 执行器中任务执行过程 版本:xxl-job 2.3.1 建议:下载xxl-job源码,按流程图debug调试,看堆栈信息并按文章内容理解执行流程。 完整流程图: 查找Ha ......
m基于simulink的六自由度高超声速飞行器内外环飞行控制器设计与仿真实现
1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 高超声速飞行器是指飞行马赫数大于5的飞行器,它是一种近空间飞行器。“近空间”可简单理解为:现有飞机飞行的最高高度(约20Km)和卫星运行轨道的最低高度(约100Km)间的空域。近空间飞行器可定性描述为:能持久稳定运行于 ......
UE5 子弹/弓箭/能量球 飞行轨迹控制
添加一个 ProjectileMovement 组件,设置下初始速度和重力即可。如下所示:注1:重力 为 0 时,子弹不受重力影响,直线飞行。 ......
xxl-job自动检测执行器周期
XXL-Job 自动检测执行器周期,执行器上下线的源码分析 XXL-Job 的自动注册和心跳检测代码相当简洁,本文继续分析它的 JobRegistryHelper 类是如何实现的,虽然只有短短的两百多行,但是值得一看。 本文要阐述两个问题: XXL-Job 是如何检测下线 Executor 且更新集 ......
m基于flocking算法的无人机群空间避障飞行matlab仿真,对比二维场景和三维场景
1.算法描述 近年来,随着通信网络、人工智能、自主系统、大数据的前沿技术的发展, 无人机蜂群作战也正在由概念变成现实,从理论走向实践。航迹规划,多机协作, 集群控制等问题成为当下研究热点。在军事作战中派遣多无人机协同作战相比于 单无人机能够在穿透敌方防御系统,探测目标以及执行攻击任务等方面更具优势 ......
HOOPS Exchange助力Shapr3D产品实现了“无障碍的用户体验”
HOOPS SDK是用于3D工业软件开发的工具包,其中包括4款工具,分别是用于 读取和写入30多种CAD文件格式的HOOPS Exchange、专注于Web端工程图形渲染的HOOPS Communicator、用于移动端和PC端工程图形渲染的HOOPS Visualize、支持将3D数据以原生3D ... ......
基于simulink的无人机姿态飞行控制仿真
1.算法描述 无人机是无人驾驶飞机的简称(Unmanned Aerial Vehicle),是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼机、多旋翼飞行器、无人飞艇、无人伞翼机。广义地看也包括临近空间飞行器(20-100 公里空域),如平流层飞艇、高空气球、太阳能无人机 ......
P2756 飞行员配对方案问题
一共有n 个飞行员,其中有 m 个外籍飞行员和 (n−m) 个英国飞行员,外籍飞行员从 1 到 m 编号,英国飞行员从 m+1 到 n 编号。 对于给定的外籍飞行员与英国飞行员的配合情况,设计一个算法找出最佳飞行员配对方案,使皇家空军一次能派出最多的飞机。 二分图板子题 用网络流输出时,判断w[i] ......
基于PSO优化的路径规划避障系统仿真,沿着障碍物边缘平滑的进行转向
1.算法描述 粒子群优化算法(PSO),粒子群中的每一个粒子都代表一个问题的可能解, 通过粒子个体的简单行为,群体内的信息交互实现问题求解的智能性。 在求解TSP这种整数规划问题的时候, PSO显然与ACO不同, PSO需要对算法本身进行一定的修改, 毕竟PSO刚开始是应用在求解连续优化问题上的. ......
ecnuoj 5042 龟速飞行棋
5042. 龟速飞行棋 题目链接:5042. 龟速飞行棋 赛中没过,赛后补题时由于题解有些抽象,自己写个题解。 可以发现每次转移的结果只跟后面两个点的胜负状态有关。 不妨设 $f_{u,a,b}$ 表示,$u+1$ 号点的胜负态为 $a$,$u+2$ 号点的胜负态为 $b$,此时从 $1$ 号点出发 ......
多面体编译技术与示例分析
多面体编译技术与示例分析多面体模型的基本概念编译器中的多面体模型(polyhedral model)是一种高效的程序优化技术,它将复杂的循环依赖关系映射到高维几何空间,从而在编译阶段实现对计算任务的并行化和局部性优化。通过构建和操作多面体表示能有效地调度指令和数据访问,以减少资源争用和缓存未命中德情 ......
m基于PID控制算法的四旋翼无人机飞行控制simulink仿真
1.算法描述 无人机采用常见的四旋翼无人飞行器,如图1所示。 PID控制器,即控制器的控制方式为P比例调整,I积分调整以及D微分调整三个部分构成,PID控制器是目前为止应用最为广泛的控制方式。PID控制器具有结构简单,性能稳定,参数设置简单等优势。PID控制器适用于各种控制对象无法进行测量获得系统参 ......
A星融合DWA的路径规划算法,可实现静态避障碍及动态避障
A星融合DWA的路径规划算法,可实现静态避障碍及动态避障,代码注释详细,matlab源码YID:4525679980340317 ......
python apscheduler 定时任务的基本使用-8-线程执行器ThreadPoolExecutor
python apscheduler 定时任务的基本使用-8-线程执行器ThreadPoolExecutor 1、线程执行器ThreadPoolExecutor 先说个人总结 假设启动线程数为N,任务数为M,misfire_grace_time为F,则执行的逻辑是这样子的: 先启动一个线程执行一个任 ......
PowerJob 快速上手 执行器与您的业务系统快速集成(单机版)(二)
Server酱消息推送集成PowerJob,完成定时推送 一、应用整合 1、Pom.xml <?xml version="1.0" encoding="UTF-8"?> <project xmlns="http://maven.apache.org/POM/4.0.0" xmlns:xsi="htt ......
PowerJob 快速上手 执行器与您的业务系统快速集成(单机版)(一)
请注意:本文中演示的案例调度器和执行器在一台机上!!! 一、说明 以下案例都是在业务系统中接入的执行器(powerjob-worker) PowerJob原文档是这样说的: 执行器(powerjob-worker)初始化 基于宿主应用的初始化宿主应用即原有的业务应用,假如需要调度执行的任务与当前业务 ......
m基于BP神经网络的障碍物避障和路线规划matlab仿真
1.算法描述 BP(Back Propagation)神经网络,其本质是一种基于误差反馈传播的神经网络算法。从结构上讲,BP神经网络是由一个信息的正向传播网络和一个误差的反向传播网络两个模块构成。BP神经网络的结构如下图所示: 从图1的结构可知,BP神经网络主要由输入层,隐含层以及输出层三个部分构成 ......