矩阵 坐标
allego 定位元器件的坐标
问题: 我想 在底板上防止连接器,但是 不知道4个连接器的相对位置。 解决: 可以 通过 找到连接器的绝对坐标来进行 计算出相对位置。 我自己 的操作 如下; ......
矩阵乘法和矩阵快速幂
1机房今天晚上不知道为啥把洛谷也关了,AC自动机没题做了,教练您做的好啊 那么就冲一个矩阵乘法和快速幂吧,开了提高OJ之后还有几道需要矩阵乘法的AC自动机没写,后面再冲一下状压虽然已经冲过了 矩阵 矩阵思想来源于线性方程组 如方程组 \[\begin{equation} \begin{cases} ......
【转载】JAVA 百度坐标,火星坐标和WGS84之间互转
原出处:https://www.cnblogs.com/Fooo/p/16986453.html /** * a */ public final static double a = 6378245.0; /** * ee */ public final static double ee = 0.00 ......
求逆矩阵
void inv(mat &x){ int n = 2, is[2], js[2]; memset(is, 0, sizeof(is)); memset(js, 0, sizeof(js)); for (int k = 0; k < n; k++) { for (int i = k, j; i < ......
地图坐标转换 WGS84、BD09与GCJ02的相互转换
高德地图 WGS84转GCJ02 export function wgs84ToGcj02(lng, lat) { if (out_of_china(lng, lat)) { return [lng, lat] } else { var dlat = transformlat(lng - 105.0 ......
Leetcode—矩阵置零
矩阵置零 给定一个 m x n 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用 原地 算法。 示例 1: 输入: 输入:matrix = [[1,1,1],[1,0,1],[1,1,1]] 输出:[[1,0,1],[0,0,0],[1,0,1]] 示例 2: 输入:ma ......
关于倾斜摄影三维模型数据的几何坐标变换的必要性分析
三维工厂K3DMaker是一款三维模型浏览、分析、轻量化、顶层合并构建、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,... ......
在matlab中进行地理坐标和像素坐标的相互转换
clc;close all;clear; %地理坐标和像素坐标的相互转换 [pic,R]=geotiffread('boston.tif'); %读取带地理坐标信息的tif影像 [m,n,~]=size(pic); %像素坐标转换为地理坐标 figure(1),imshow(pic),title(' ......
快速幂,快速乘,矩阵乘
快速幂,快速乘,矩阵乘 快速幂 计算\(a^n(n\geqslant0)\),一般会对答案取个模 例如计算\(5^{11}\),考虑11二进制\((1011)_2\)有\(5^{11} = 5^8*5^2*5^1\) 将n的二进制中为1的位置对应的a的\(2^k\)次幂相乘就能得到最终结果 可以用\ ......
任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的
首先来看一下什么是欧拉角(Euler angles)?构件在三维空间中的有限转动,可依次用三个相对转角表示,即进动角、章动角和自旋角,这三个转角统称为欧拉角。——引自百度百科莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧 ......
[LeetCode Hot 100] LeetCode74. 搜索二维矩阵
题目描述 思路:二维矩阵坐标变换 + 二分查找 二维矩阵坐标变换: 只要知道二维数组的的行数m和列数n,二维数组的坐标 (i, j) 可以映射成一维的index = i * n + j;反过来也可以通过一维index反解出二维坐标 i = index / n,j = index % n。(n是列数) ......
关于倾斜摄影三维模型数据的几何坐标变换的必要性分析
三维工厂K3DMaker是一款三维模型浏览、分析、轻量化、顶层合并构建、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,... ......
PCA(Principal Components Analysis)主成分分析: 一维列向量坐标的变换是左乘变换矩阵 而 一维行向量的坐标系基元的变换 是 右乘变换矩阵
总结: 一维列向量的 坐标变换是 左乘变换矩阵; 一维行向量的 坐标系基元变换 是 右乘变换矩阵; 坐标变换 坐标变换定义:把一个向量(或一个点)从一个高维(或3D)坐标系,转换到另一个高维(或3D)坐标系去。 举个栗子:东北天坐标系上的点A坐标为 (1, 2, 3),通过坐标变换到北西天坐标系,点 ......
ICEE-Keyboard- 键盘工作原理:扫描GPIO:{X行,Y列}感应点矩阵在按键触发点感应电路{x,y}通过MCU映射到按键字符
ICEE-Keyboard-键盘工作原理: 周期性扫描电路感应点矩阵: 电路感应点矩阵有总共X行与总共Y列的电路感应{电容式,电阻式,开关式}点, 例如总共12行, 总共12列; 则总共有144个键位点; 电路感应点矩阵的每一行或每一列都有一条电路线直连MCU的一个GPIO;例如总共12行, 总共1 ......
矩阵搜索,矩阵有规律
搜索二维矩阵 II编写一个高效的算法来搜索 m x n 矩阵 matrix 中的一个目标值 target 。该矩阵具有以下特性: 每行的元素从左到右升序排列。每列的元素从上到下升序排列。 示例 1: 输入:matrix = [[1,4,7,11,15],[2,5,8,12,19],[3,6,9,16 ......
Leetcode—旋转矩阵
48. 旋转图像 给定一个 n × n 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]] ......
分类模型评估(混淆矩阵, precision, recall, f1-score)的原理和Python实现
混淆矩阵 当我们已经获取到一个分类模型的预测值,可以通过不同指标来进行评估。 往往衡量二分类模型是基于以下的混淆矩阵概念: True Positive:真实值为正、预测值为正(真阳性) False Positive:真实值为负、预测值为正(假阳性) False Negative:真实值为正、预测值为 ......
三维模型数据的高程偏差的几何坐标纠正技术方法浅析
三维工厂K3DMaker是一款三维模型浏览、分析、轻量化、顶层合并构建、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,... ......
P1129 [ZJOI2007] 矩阵游戏 建模部分
link 题解没一个说为什么能用最小割的...(当然可能是只有我不知道) 设交换后行、列数相同的第 \(x\) 行和第 \(y\) 列(\(x,y\) 为原始位置),发现它们的交点现在位于 \((i,i)\),原来位于 \((x,y)\)。因为无论怎么交换位置,原来的交点仍是交点。 所以可以得出一个 ......
线性映射与矩阵空间同构、线性映射的维数公式
 编译/调试环境的搭建步骤;然后,介绍部分的类图结构,和调用时序; 1 搭建ROS2的编译环境 参考:http://docs.ros ......
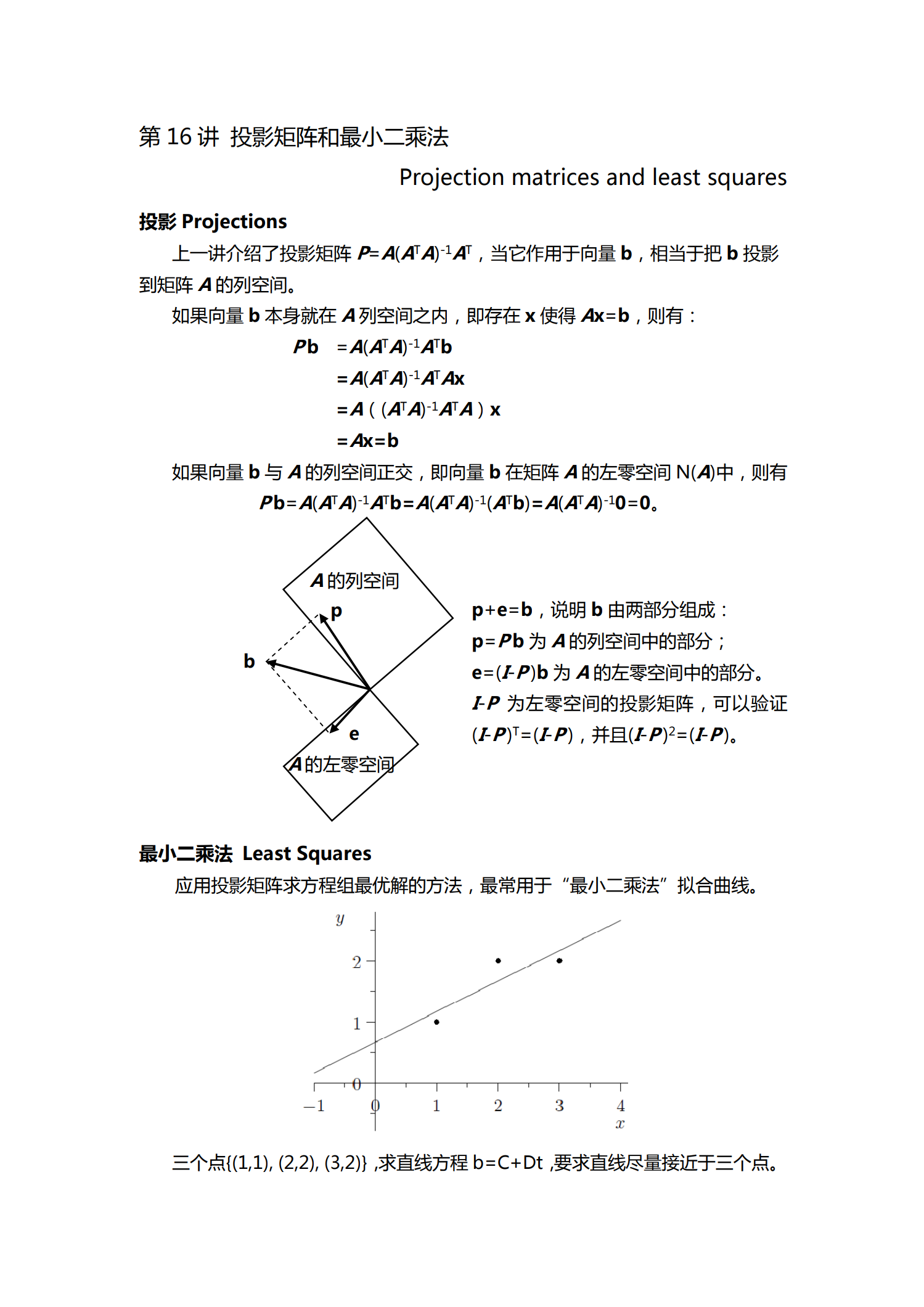
MIT18.06Linear Algebra 第16讲 投影矩阵和最小二乘法
  => { if (params.va ......
矩阵学习笔记
前言 蒟蒻刚刚开始学矩阵,有些东西可能理解得不是特别好。 矩阵的定义 在 \(c\)++ 中,矩阵其实就是一个 \(n*m\),可以做运算的二维数组。也是运算的中的一种基本单位。 特殊的矩阵 在矩阵的运算过程中,可能会用到一些特殊的矩阵的名称,以下是比较常见的一些特殊矩阵: 同型矩阵:两个矩阵,行数 ......
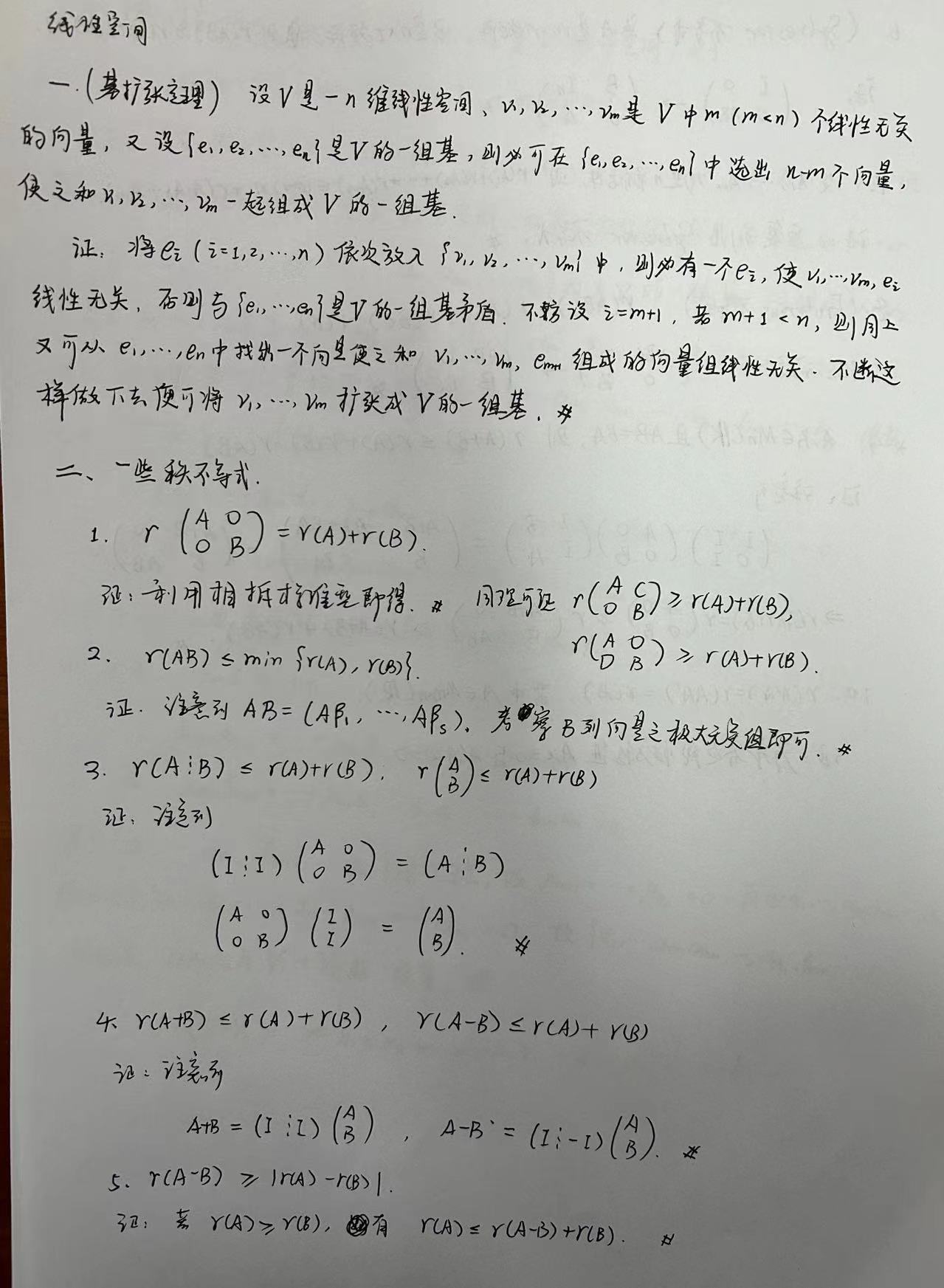
基扩张定理、矩阵秩不等式、线性空间的维数公式、直和等价命题
向量范数是很常见的,在很多教科书里都能见到。矩阵范数是对向量范数的一种推广。下面转载一篇讲解矩阵范数的文章,里面有对弗罗贝尼乌斯范数的定义,比较适合扫盲。原文如下: 矩阵范数(matrix norm)是数学上向量范数对矩阵的一个自然推广。 矩阵范数的特性 以下 K 代表实数或复数域。现在考虑 空间, ......
倾斜摄影三维模型重建的几何坐标变换技术方法浅析
三维工厂K3DMaker是一款三维模型浏览、分析、轻量化、顶层合并构建、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,... ......
[LeetCode] LeetCode378. 有序矩阵中第K小的元素
题目描述 思路:Top-K问题 + 大顶堆 使用大顶堆求第K小的元素。 方法一: class Solution { public int kthSmallest(int[][] matrix, int k) { // 1. 使用大顶堆 PriorityQueue<Integer> heap = ne ......