代数slam
线性代数期末速通
目录行列式(数值)逆序数行列式的性质行列式计算的根本行列式转置行列式行(列)变换null行列式某行列成比例行列式公因子k可提行列式倍加D不变某行列全0值0行列式某行列可拆补充|AB|=|A|+|B|四阶以上行列式计算变换为上下三角主对角线相乘按行列展开(余子式与代数余子式)异乘变零以及速算方法范德蒙 ......
复旦大学2023--2024学年第一学期高等代数I期末考试情况分析
一、期末考试成绩班级前十名的同学 褚乐一(91)、陈天乐(91)、文俊(90)、林加耀(90)、覃昊东(89)、高宇飞(88)、周家宏(85)、邓海斌(85)、陈康(85)、牛博彬(85) 二、总评成绩计算方法 平时成绩根据交作业的次数决定。本学期提交作业共13次,10次100分,少1次扣10分。 ......
复旦大学2023--2024学年第一学期(23级)高等代数I期末考试第七大题解答
七、(10分) 设 $A$ 为 $n\,(n>1)$ 阶非异阵, $B$ 是 $A$ 的逆阵. 任取 $r$ 个指标 $1\leq i_1<i_2<\cdots<i_r\leq n$, 剩余的指标记为 $1\leq i_{r+1}<\cdots<i_n\leq n$. 证明:$$|A|\cdot B ......
SLAM技术参数与构图分析
SLAM技术参数与构图分析 SuMa方案 原理介绍:此算法使用Surfel地图去实现前端里程计和闭环检测,此前Surfel地图曾被用在RGBD-SLAM中,第一次被用在在室外大场景三维SLAM中。Surfel地图最早是用在基于RGB-D相机的三维重建任务中的。SuMa的整体流程就是先处理点云把点云从 ......
复旦大学2023--2024学年第一学期(23级)高等代数I期末考试第八大题解答
八、(10分) 设 $V$ 是数域 $\mathbb{K}$ 上的 $n$ 维线性空间, $\varphi,\psi$ 是 $V$ 上的线性变换, 满足 $\varphi\psi=\psi\varphi$. 证明: 存在正整数 $m$, 使得 $$\mathrm{Im}(\varphi^m+\psi ......
slam相关-Sophus库cmake报错target "CUDA::cusolver" not found.
报错细节 用cmake编译Sophus库时,有类似如下报错 CMake Error at test/core/CMakeLists.txt:18 (ADD_EXECUTABLE): Target "test_sim3" links to target "CUDA::cublas" but the t ......
d2l之线性代数
一、降维 1、求和 对一个n维数组进行求和,如果指定沿哪一个轴来通过求和降低维度。如下是降低0维: A = torch.arange(20, dtype=torch.float32).reshape(5,4) print(A) print(A.sum(axis=0)) /* tensor([[ 0. ......
线性代数
快速回忆 https://www.bilibili.com/video/BV1fv411y7YY/?spm_id_from=333.337.search-card.all.click&vd_source=7d25891621ad1216794c14a83cfaaf60 行列式 求余子式、代数余子式 ......
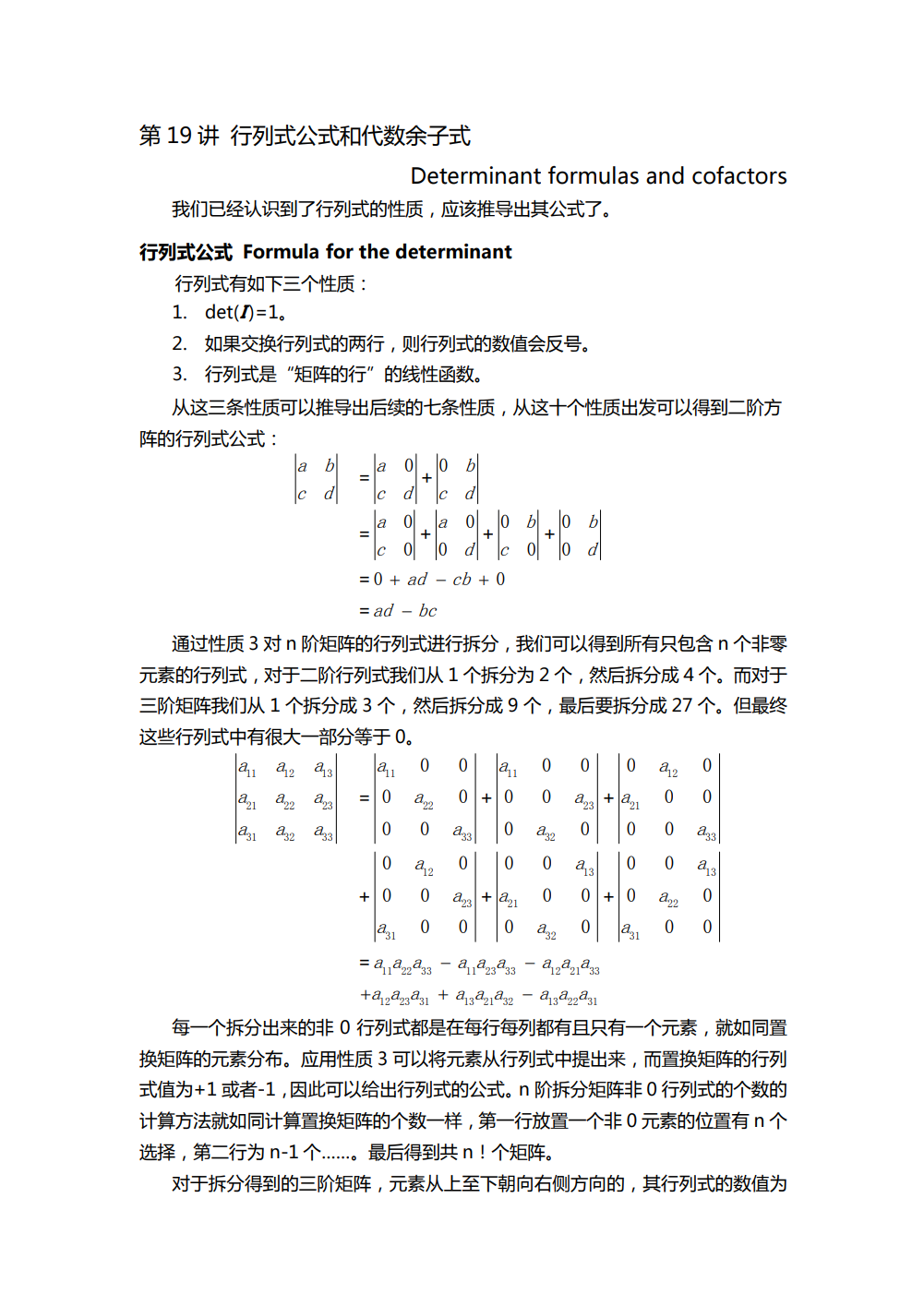
MIT18.06Linear Algebra 第19讲 行列式公式和代数余子式
 ; % 判断是否存在足够数量的线性无关特征向量 if rank ......
线性代数基础-矩阵奇异值分解-02
目录1. 引入2. 几何的角度理解SVD3. 空间的角度理解4 如何求解SVD5. SVD的应用 1. 引入 奇异值分解,singular value deconposition是6种矩阵分解方式中,综合性最强应用最广泛的分解技术,是PCA(主成分分析)的基础 六种矩阵分解技术: 只有矩阵为方阵(m ......
Advanced Algebra高等代数 - 多元建模有多个方程(多元线性)组成 - 使用 NumPy 实现 矩阵的初等行变换:
线性:指多元变量的每一元变量都是1次方(可以将高于1次方的元,以新一元变量代换,求解再做开方运算) 将应用问题转化为 多个多元线性方程,并成一组; 由多元线性方程组 抽出 增广矩阵,并以“消元法”的策略,步步判断求解; 对 增广矩阵 的 多个 “方程” 应用“行消元法” 化简 成 阶梯矩阵;判断有无 ......
线性代数基础-特征值与特征向量-01
目录1. 概念2. 性质3. 相似矩阵4. 矩阵的行列式与迹5. 特征值与特征向量分解矩阵 1. 概念 特征值与特征向量的英文是 eigenvalue 和 eigenvector, 这个前缀 eigen- 起源于德语,意思是 proper(这里应该是专属的意思)、characteristic(特征的 ......
SLAM中的李群李代数
SLAM的李群和李代数的应用体现在旋转矩阵和旋转向量上:旋转矩阵对应李群,旋转向量对应李代数。 在现代微分几何中李群一种流形(Manifold),单位元处的正切空间代表了这个李群的李代数空间。 旋转本身有3个自由度。旋转向量就可以完整表示。然而旋转矩阵是3x3的,有9个变量,变量之间是有约束关系的( ......
线性代数
暂时咕咕咕了某些内容。 1. 矩阵 1.1 记号与约定 记一个 \(n\times m\) 的矩阵 \(A\) 行号集合为 \(\{1,2,\ldots,n\}\),列号集合为 \(\{1,2,\ldots,m\}\),有时会根据上下文省略下标中的 \(A\)。 将矩阵 \(A\) 第 \(i\) ......
速通 线性代数
第一章 向量空间 向量空间 这个先鸽一会儿。 线性方程组 这个先鸽一会儿。 线性相关与基底 这个先鸽一会儿。 第二章 线性变换与矩阵 线性变换 这个先鸽一会儿。 坐标表示 这个先鸽一会儿。 可逆与同型 这个先鸽一会儿。 对偶空间 这个先鸽一会儿。 第三章 基本行列变换与线性方程组 这个先鸽一会儿。 ......
ORB-SLAM3中IMU初始化
ORB-SLAM3中IMU初始化由LocalMapping线程中的InitializeIMU函数完成。 主要是完成重力方向\(R_{wg}\)和尺度scale的估算,总共进行三次。 InitializeIMU函数包含两部分:InertialOptimization 和 FullInertialBA ......
在任意代数结构上的多项式乘法 学习笔记
前言 Stop learning useless algorithms, go and solve some problems, learn how to use binary search. 以下内容大多是作者看完《如何在任意代数结构上做多项式乘法》[1] 后口胡的,所以可能和原文章不太一样。如果 ......
2024霍格沃茨魔法学院666高等代数试题
一、叙述 \(n\) 阶行列式的几何意义. 二、计算 \(n\) 阶行列式 \[\begin{vmatrix}(a_0+b_0)^n&(a_0+b_1)^n&\cdots&(a_0+b_n)^n\\(a_1+b_0)^n&(a_1+b_1)^n&\cdots&(a_1+b_n)^n\\\vdots& ......
代数
1. 封闭运算 例 2. 代数系统 例 \(+_3是加完模3的意思\) 3. 运算的性质 1. 结合性 例 2. 交换性 3. 分配性 例 4. 吸收律 5. 消去律 6. 幂等律 例 3. 幺元,零元,逆元 1. 幺元 例 a既是左幺元又是右幺元 2. 零元 浅色是幺元,深色是零元 例 3. 逆元 ......
乘法加法和代数计算如何算的快,准
进位尽量用脑子来记忆, 因为每一次进位只保存一个即可.进位跟下一个加完之后就更新了.所以记忆不难, 多训练即可. 举一个例子: 135*87 首先写下 135 87 75=35.所以脑子记住进位3, 写下5. 然后37=21, 所以我们写上4, 脑子记住2. 1*7=7所以我们写下9就完事了. 少写 ......
【持续更新篇】SLAM视觉特征点汇总+ORB特征点+VINS前端
Harris角点 opencv函数 cornerHarris提取输入图像的Harris角点 检测原理 检测思想:使用一个固定窗口在图像上进行任意方向的滑动,对比滑动前后的窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有较大灰度变化,则认为该窗口中存在角点。 \(E(u, v)=\sum_{( ......
【面试官版】【持续更新中】融合滤波算法+数据结构+激光视觉SLAM+C++面试题汇总
C++部分 什么时候需要写虚函数、什么时候需要写纯虚函数? 只继承接口为纯虚函数 强调覆盖父类重写,或者父类也需要实现一定的功能,为虚函数 指针传参和引用传参区别? 引用传参本质上是传递原参数地址,指针传参本质还是值传递,生成拷贝指针,拷贝指针和原指针指向的为同一块内存。因此改变拷贝指针的指向不影响 ......
3DS-SLAM一种面向3D对象检测的语义SLAM动态室内环境
3DS-SLAM一种面向3D对象检测的语义SLAM动态室内环境 环境中可变因素的存在可能会导致相机定位精度的下降,因为这违反了同步定位和映射(SLAM)算法中静态环境的基本假设。 最近针对动态环境的语义SLAM系统要么仅依赖于2D语义信息,要么仅依赖几何信息,或者以松散集成的方式组合它们的结果。本节 ......
Python NumPy 线性代数
1、矩阵和向量积 矩阵和向量积可以用 numpy.dot() 函数来计算。numpy.dot() 函数的两个参数分别是矩阵和向量。 1)矩阵积 矩阵积是两个矩阵相乘的结果。矩阵积的计算方法是将矩阵的每一行与另一个矩阵的每一列相乘,然后将各个相乘结果相加。 示例代码:Python NumPy 线性 ......
上辈子造了什么孽这辈子才要学代数拓扑
我 TM 都不知道是数学系哪些傻鸟老师觉得信息与计算科学的人要必修拓扑的 你清这拓扑还主要就讲代数拓扑(虽然也没讲完,还有门课),这个同调理论有个鸡儿用。 要是觉得数学课不够多,多塞几门计算数学或者统计课呗。 这个拓扑又难学又废物,就算是数学界自己,拓扑也发展不下去了。 艹 ......
自动驾驶与机器人的slam技术
https://github.com/gaoxiang12/slam_in_autonomous_driving 第1章,概述 第2章,数学基础知识回顾,几何学、运动学、KF滤波器理论,矩阵李群 第3章,误差状态卡尔曼滤波器,惯性导航、卫星导航、组合导航 第4章,预积分,图优化,基于预积分的组合导航 ......
SLAM在自动驾驶中的应用与难点
https://geososo.com/uploadedfile/004459_SLAM%E6%8A%80%E6%9C%AF%E5%9C%A8%E8%87%AA%E5%8A%A8%E9%A9%BE%E9%A9%B6%E4%B8%AD%E7%9A%84%E5%BA%94%E7%94%A8%E4%B8% ......
线性代数题解
前言 写完了这道题我好想刚明白一点最小割???UU好闪,拜谢UU。 题解 首先,我们可以发现若第 \(i\) 行的 \(B\) 没选,那么第 \(i\) 列的 \(B\) 也不选,所以此时对于行和列是等价的。 若 \(A_i\) 是 \(0\),则会减少贡献 \(\sum_{j}B_{i, j}\) ......