双目 杂谈 立体 视觉
小红刷去水印工具:让你轻松摆脱烦人水印,享受纯净视觉盛宴!
大家好!今天我要向大家推荐一款热门的去水印工具——小红刷。随着社交媒体的普及,我们经常会在朋友圈、微博、抖音等平台上看到各种精彩的图片和视频,但是很多时候这些作品都被添加了烦人的水印,影响了我们的观看体验。小红刷去水印工具的出现,为我们解决了这个烦恼,让我们能够轻松摆脱水印的困扰,享受纯净的视觉盛宴 ......
【杂谈】精神污染
# No.1 M͚̝̘̞̯̦̌̂͑ͤ̓ͭ̀o͒̌̑̒̎͊͆ͬͬ҉̩̥͎n͖̻̜̰̪ͦͣ͐́͆̀̚ì̙̝ͪ͞k̶̴̺͕͓̹̱͚̪̍ͫ͂̇ͬ̑̉̓̍a̱̋ͦ͗̌̌̊͊̊́.̐ ⎛⎞⎝⎠q๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊๊ ......
数据可视化【原创】vue+arcgis+threejs 实现立体光圈闪烁效果
本文适合对vue,arcgis4.x,threejs,ES6较熟悉的人群食用。 效果图: 素材: 主要思路: 先用arcgis externalRenderers封装了一个ExternalRendererLayer,在里面把arcgis和threejs的context关联,然后再写个子类继承它,这部 ......
视觉SLAM十四讲 3.6.2实际的坐标转换的例子
在这一讲中,作者没有给出详细的过程,作为初学者还是有点懵。 这道题是有两种解法的 - 四元数解法 - 欧拉矩阵解法 ### 四元数解法 假设一个目标点 $p$在世界坐标系下的坐标是 $$ P_W $$ 利用四元数表示旋转,两个小萝卜坐标系下 $p$ 点坐标有如下公式: $$ p_1 = q_1 * ......
基于机器视觉的小车轨迹控制软件界面展示
**项目概述:** 硬件:USB摄像头、51单片机、L298N驱动、ESP2866-WiFi模块、移动电源  软件: ......
数据可视化【原创】vue+arcgis+threejs 实现流光立体墙效果
本文适合对vue,arcgis4.x,threejs,ES6较熟悉的人群食用。 效果图: 素材: 主要思路: 先用arcgis externalRenderers封装了一个ExternalRendererLayer,在里面把arcgis和threejs的context关联,然后再写个子类继承它,这部 ......
【个人杂谈】假如我是一个前端工程师,我该如何在日常的学习过程中使用费曼学习法?
## 什么是费曼学习法? 费曼学习法是一种学习方法,它由诺贝尔物理学奖得主理查德·费曼(美籍犹太裔物理学家,加州理工学院物理学教授,1965年诺贝尔物理奖得主)提出。该方法的核心思想是**通过将所学的知识以简单明了的方式解释给别人**,来加深自己对知识的理解和掌握。 具体来说,费曼学习法包括以下几个 ......
杂谈
众所周知,我体育中考失败了。 而且是完全失败。 真好笑。 回家想了一下,感觉我在考场的所作所为跟小丑一样——自信虚伪,骄傲自大。 然后呢?跳绳比平时少了二三十个,长跑是本组的最后一名。 还假惺惺地要找主考员申诉。 平时在学校跟班主夸下海口,必满分。 小丑。沉淀。 回想从2023年初到现在,基本都是失 ......
3D视觉引导机械手原理分析
下面以康耐视的3D点云相机举例,由于相机出厂默认校准过,所以以下忽略内参推导(后面有机会可以专门做一篇分享),只对外参部分做分享。 1. 手眼标定的意义: 所谓标定,就是求解坐标系之间相对位置关系的变换矩阵的过程。 2. 眼在手外: 这里我们可以讲A坐标系理解为机械臂的底座坐标系,B坐标系为相机坐标 ......
Cognex InSight 相机实现视觉引导机械手&视觉校准&九点标定
1. 校准 1. 非线性校准的作用:主要是为了消除镜头的径向畸变、以及相机非垂直安装引起的透视变形; 2. 校准工具:校正板&标定板(这里只介绍前2种,因为InSight相机不支持DataMatirx标定板) 3. 标定板的选择标准:需要根据项目现场的FOV确定标定板尺寸和单元大小 棋盘格标定板: ......
使用大型语言模型进行自主视觉信息搜索
在调整大型语言模型(LLM)以适应任务的多模态输入方面取得了很大进展,包括图像标题,可视问答 (VQA)和开放词汇识别.尽管取得了这些成就,但当前最先进的视觉语言模型(VLM)在视觉信息搜索数据集上表现不佳,例如信息搜索和OK-VQA,需要外部知识才能回答问题。 ......
基于机器视觉工具箱的车辆检测计数算法matlab仿真
1.算法理论概述 1.1、研究背景 随着城市化进程的加速和汽车保有量的增加,交通拥堵和交通事故等交通问题日益突出,如何对城市交通进行有效管理和调控成为了城市交通管理的重要任务。车辆检测计数是交通管理中的一个重要问题,它可以用于交通状况的监测、交通流量的统计以及交通信号灯的控制等。因此,研究基于机器视 ......
多轨模式——音量与立体音包络线
 这个是主控,可以控制上面所有的音频轨道  - [2、数据集的标定](#2_14) - [3、双目测距代码的单独运行调试](#3_17) - [4、YOLO v5与双目测距的代码的结合](#4YOLO_v5_20) ......
ACM MM 2023 | 腾讯优图实验室6篇论文入选,含视觉识别、半监督学习等研究方向
前言 近日,腾讯优图实验室6篇论文被国际人工智能多媒体领域顶级会议ACM MM 2023(ACM International Conference on Multimedia)所接收, 涵盖视觉识别、神经绘画和风格化研究、半监督学习等多个研究方向,进一步展示了腾讯优图实验室在人工智能领域的技术能力和 ......
【双目相机产品调研整理】22/12/01
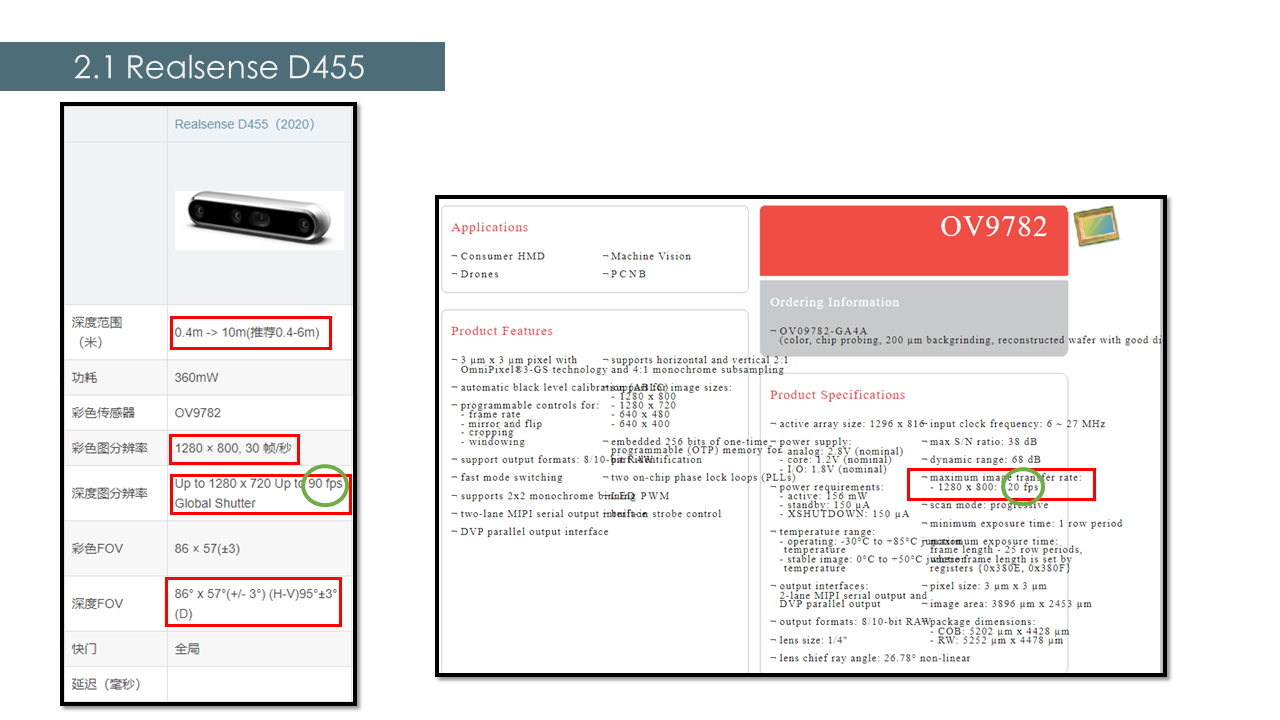   > [双目立体视觉:标定和校正](https://zhuanlan.zhihu.com/p/353311373) > ......
双目测距方案
# 双目测距方案 > Written On 2023-01-26. 双目测距方案流程为: 1. 立体校正得出重投影矩阵 2. 识别得到左右目中,待测物体的中心像素点坐标 3. 计算距离(深度信息) ## 立体校正得出重投影矩阵 通过立体校正,可用求得重投影矩阵 $Q$。 重投影矩阵 $Q$ 实现了世 ......
计算机视觉(Computer Vision),计算机图形学(Computer Graphics)和数字图像(Image Processing)
计算机视觉(Computer Vision),计算机图形学(Computer Graphics)和数字图像(Image Processing) 从学科分类: Computer Science/ Artificial Intelligence/ Computer Vision Computer Sci ......
计算机视觉五大核心研究任务全解:分类识别、检测分割、人体分析、三维视觉、视频分析
> 本篇文章深入探讨了计算视觉的定义和主要任务。内容涵盖了图像分类与识别、物体检测与分割、人体分析、三维计算机视觉、视频理解与分析等技术,最后展示了无监督学习与自监督学习在计算机视觉中的应用。 > 作者 TechLead,拥有10+年互联网服务架构、AI产品研发经验、团队管理经验,同济本复旦硕,复旦 ......
【杂谈】CSP 考前日记
### To do list |题目|链接|完成情况| |:--:|: :|: :| |ARC158C题解|[ARC158C](https://www.luogu.com.cn/problem/AT_arc158_c)|**DNF**| |CF1847F|[CF1847F](https://www. ......
2023.3.24杂谈【化学×情感】
今天的化学课上,老师讲了这样一个方程式: $$3Cu + 2HNO_3 + 3H_2SO_4\stackrel{}{=\!=\!=} 3CuSO_4 + 2NO\uparrow + 4H_2O $$ 当硝酸少量时,它只表现出了氧化性,而并未表现出酸性。 这何尝不是一种 $NTR$,硝酸经过努力,终于 ......
雷军3小时激情演讲主要内容杂谈
雷军3小时激情演讲主要内容杂谈 雷军3小时仅提到两次汽车,小米首款车到哪一步了? 出乎意料,雷军并没有在小米年度发布会上介绍小米汽车的进展。就在刚刚,雷军进行了今年的年度演讲和年度产品发布,在三个多小时的发布会上,雷总依次介绍了折叠屏手机、平板电脑、红米K60、小米手环,甚至是机器狗等产品,多次“遥 ......
AI-13. 计算机视觉
本章将重点介绍计算机视觉领域,并探讨最近在学术界和行业中具有影响力的方法和应用。 13.1. 图像增广 图像增广在对训练图像进行一系列的随机变化之后,生成相似但不同的训练样本,从而扩大了训练集的规模。随机改变训练样本可以减少模型对某些属性的依赖,从而提高模型的泛化能力。 例如,我们可以以不同的方式裁 ......
iPhone 15参数性能配置杂谈
iPhone 15参数性能配置杂谈 iPhone 15核心配置,曝光! 按照往年的节奏,还有不到一个月的时间,全新的iPhone 15系列就要和我们见面了。其实在为期一年的「iPhone 15曝光会」中,相信大家应该已经猜到了不少关于iPhone 15系列的大致信息,比如iPhone 15依旧会有1 ......