visual-inertial vins-mono estimator monocular
Bias of an estimator
Bias of an estimator Difference between an estimator's expected value from a parameter's true value For broader coverage of this topic, see Bias (stat ......
Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection (5)
Qualitative Results如下图所示: ......
VINS-MONO Realsense d455运行记录
安装VINS-Mono 创建工作空间 mkdir -p ~/vins_mono_ws/src # 创建了第二层级的文件夹src,这是放ROS软件包的地方 cd ~/vins_mono_ws/src # 进入工作空间,catkin_make必须在工作空间这个路径上执行 catkin_init_work ......
Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection (3)
损失函数分为3种类型: (1) 对于热力图,用以下的Focal Loss计算: (2) 对于深度,采用Laplacian aleatoric uncertainty loss function for depth计算: (3) 对于尺寸采用L1 Loss计算: ......
MonoNeRF: Learning Generalizable NeRFs from Monocular Videos without Camera Poses
1. 论文简介 论文题目:MonoNeRF: Learning Generalizable NeRFs from Monocular Videos without Camera Poses Paper地址:chrome-extension://efaidnbmnnnibpcajpcglclefind ......
Proj CDeepFuzz Paper Reading: Aries: Efficient Testing of Deep Neural Networks via Labeling-Free Accuracy Estimation
## Abstract 背景: 1. the de facto standard to assess the quality of DNNs in the industry is to check their performance (accuracy) on a collected set of ......
Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection (2)
Feature backbone采用DLA,输入维度为3×H×W的RGB图,得到维度D×h×w的特征图F,然后将特征图送入几个轻量级regression heads,2D bouding boxes的中心特征图用下面的模块得到: 其中AN是Attentive Normalization.用公式表示: ......
Extended Kalman Filter vs. Error State Kalman Filter for Aircraft Attitude Estimation笔记
# EKF与ESKF的对比 ***“Engineers can solve exact problems using numerical approximations, or they can solve approximate problems exactly" - Fred Daum.*** 对 ......
Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection(1)
MonoCon的网络结构和MonoDLE几乎一样,只是添加了辅助学习(Auxiliary Learning, AL)模块. 网络结构如上图所示,对于3D目标检测来说,预测2D框是没有必要的,但是MonoCon在训练阶段仍然计算了2D框的损失函数,但是在推理的时候,并不会预测2D框,这就是所谓的辅助学 ......
[SIGMOD 2022]Lightweight and Accurate Cardinality Estimation by Neural Network Gaussian Process
# Lightweight and Accurate Cardinality Estimation by Neural Network Gaussian Process ## 总结 用无限宽度神经网络和高斯过程来等价贝叶斯过程,并利用主动学习提高精度,实现对某个SQL查询的cost估算 ## 动机 ......
Logistic Regression and its Maximum Likelihood Estimation
# 从 Linear Regression 到 Logistic Regression 给定二维样本数据集 $D = \left\{ (\vec{x}_{1}, y_{1}), (\vec{x}_{2}, y_{2}), \ldots, (\vec{x}_{n}, y_{n}) \right\}$, ......
Online Temporal Calibration for Monocular Visual-Inertial Systems
摘要: 准确的状态估计是各种智能应用的基本模块,例如机器人导航、自动驾驶、虚拟和增强现实。近年来,视觉和惯性融合是一种流行的技术,用于6自由度状态估计。不同传感器测量记录的时间点对于系统的鲁棒性和准确性非常重要。实际上,每个传感器的时间戳通常会受到触发和传输延迟的影响,导致不同传感器之间存在时间错位 ......
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator-翻译
摘要:本文介绍了一种单目视觉惯性系统(VINS),用于在各种环境中进行状态估计。单目相机和低成本惯性测量单元(IMU)构成了六自由度状态估计的最小传感器套件。我们的算法通过有界滑动窗口迭代地优化视觉和惯性测量,以实现精确的状态估计。视觉结构是通过滑动窗口中的关键帧来维护的,而惯性度量则是通过关键帧之 ......
Density estimation using Real NVP
[TOC] > [Dinh L, Sohl-Dickstein J. and Bengio S. Density estimation using real nvp. ICLR, 2017.](http://arxiv.org/abs/1605.08803) ## 概 一种可逆的 flow, 感觉很 ......
使用 TensorFlow 自动微分和神经网络功能估算线性回归的参数(Estimate parameters for linear regression using automatic differentiation or neural network functions of TensorFlow)
大多数的深度学习框架至少都会具备以下功能: (1)张量运算 (2)自动微分 (3)神经网络及各种神经层 TensorFlow 框架亦是如此。在《深度学习全书 公式+推导+代码+TensorFlow全程案例》—— 洪锦魁主编 清华大学出版社 ISBN 978-7-302-61030-4 这本书第3章 ......
Feb 2023-Replay Memory as An Empirical MDP: Combining Conservative Estimation with Experience Replay
将 replay memory视为经验 replay memory MDP (RM-MDP),并通过求解该经验MDP获得一个保守估计。MDP是非平稳的,可以通过采样有效地更新。基于保守估计设计了价值和策略正则化器,并将其与经验回放(CEER)相结合来正则化DQN的学习。 ......
Controllable Guarantees for Fair Outcomes via Contrastive Information Estimation
Gupta U., Ferber A. M., Dilkina B. and Steeg G. V. Controllable guarantees for fair outcomes via contrastive information estimation. AAAI, 2021. 概 本文提 ......
2020CVPR_Zero-Reference Deep Curve Estimation for Low-Light Image Enhancement
1. motivation 收到图像编辑软件的启发 2. Contribution (1)无监督 (2)设计图像高阶曲线适应适合像素级映射,通过迭代自身 (3)设计了四个无参考损失函数 3. Network 3.1 DCE-Net DCE-Net: 是由6个Conv2D(3x3)+ relu,分别输 ......
[State Estimation] 2.2.8 Passing a Gaussian throught a Nonlinearity
将高斯 PDF 通过非线性函数,结果使用高斯变换表示。 这涉及到 linearization 。 问题的定义是有 $\mathbf{x}$ 符合高斯噪声(即已知 $p(\mathbf{x})$),有变换 $g(\cdot): \mathbf{x} \to \mathbf{y}$(即已知 $p(\ma ......
[State Estimation] 4.2.8 Bayes Filter
PF 理解不深,若干年前 coursera 上某门课程做了填空式编程题,仅此而已。 重点应该有二: weight 定义方法; Resampling 方法,减少例子数量,维持系统计算量。 Madow Resampling 图示如下,参考 https://youtu.be/DhxRxG5bSrg?t=1 ......
[State Estimation] 4.2.3 Extended Kalman Filter
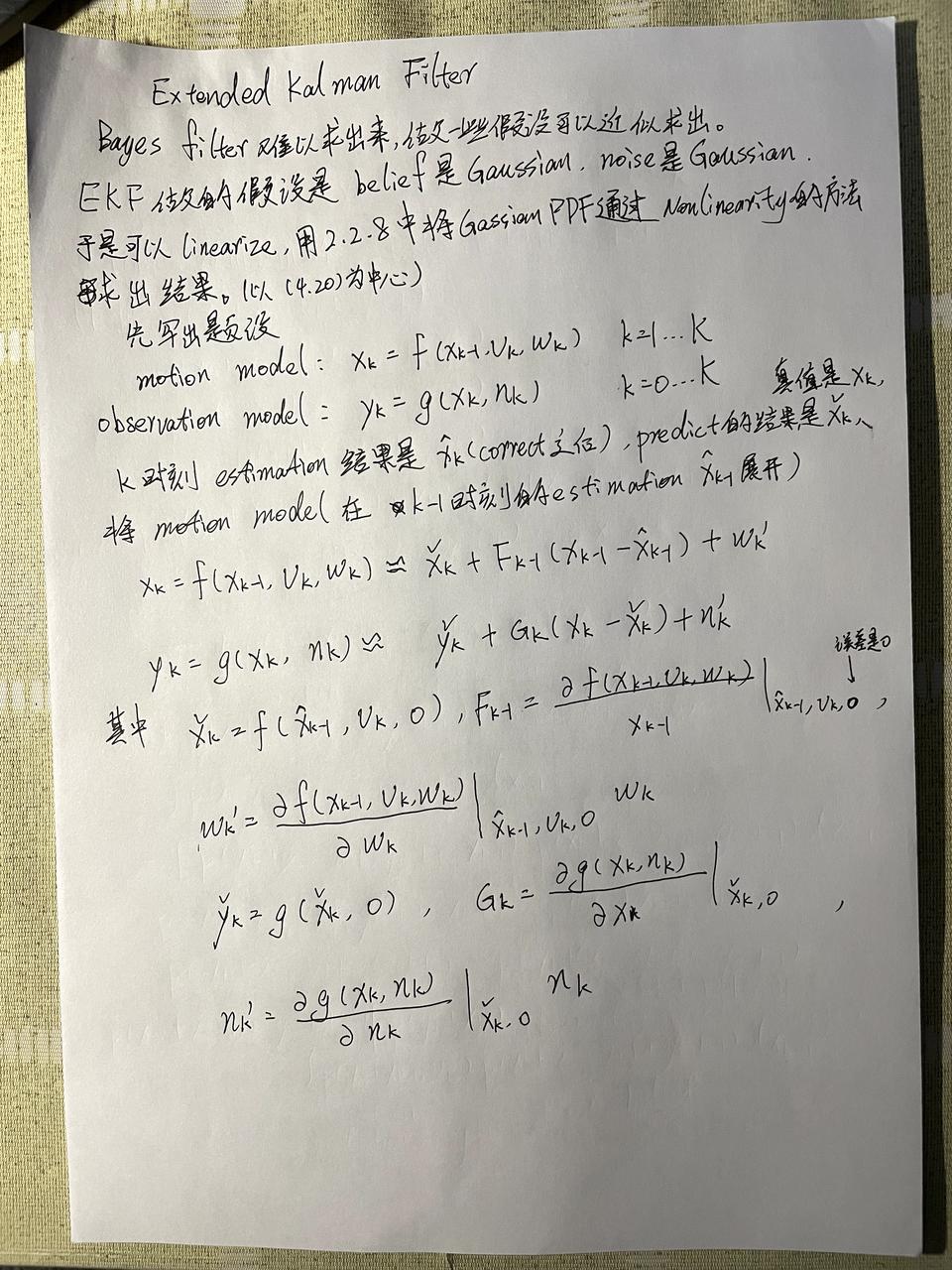   通过非线性 observation model 与 motion model ; 噪声是 ......
Density estimation using real nvp
Density estimation using real nvp 参考资料: 苏剑林. (Aug. 26, 2018). 《细水长flow之RealNVP与Glow:流模型的传承与升华 》[Blog post]. Retrieved from https://kexue.fm/archives/5 ......
Vins-Mono 阅读笔记——estimator
vins_estimator 概述 基本上VINS里面绝大部分功能都在这个package下面,包括IMU数据的处理(前端),初始化(我觉得可能属于是前端),滑动窗口(后端),非线性优化(后端),关键帧的选取(部分内容)(前端)。我第一次看的时候,总是抱有一个疑问,就是为什么把这么多内容全都放在这一个 ......
Vins-Mono 阅读笔记——前端
1、前端流程概述 VINS-Mono的前端整个封装成了一个ROS节点其订阅的topic是: 相机或者数据集发来的图片 其发布topic是: 由pub_img发布的"feature",发布的是当前帧的特征点,特征点分装成了sensor_msgs::PointCloudPtr类型,里面包括了每个特征点的 ......
随机森林n_estimators 学习曲线
随机森林 单颗树与随机森林的的分对比 # 导入包 from sklearn.datasets import load_wine from sklearn.model_selection import train_test_split from sklearn.tree import Decision ......
Micro-Estimates of Wealth for all Low 数据搜集
Micro-Estimates of Wealth for all Low- and Middle-Income Countries 1. The first test uses data from 15 LMICs that have collected and published census ......
GeoLayout: Geometry Driven Room Layout Estimation Based on Depth Maps of Planes
注:刚入门depth estimation,这也是以后的主要研究方向,欢迎同一个方向的加入QQ群(602708168)交流。 1. 论文简介 论文题目:GeoLayout: Geometry Driven Room Layout Estimation Based on Depth Maps of P ......