小车ros
ROS报错:warning:clock skew detected. Your build may be incomplete
### 问题原因: 主要原因是系统时钟错误了,即系统发现了晚于当前时间编译的文件,自然就无法编译。 ### 解决方法: 可以通过修改系统时间等方法解决,但是目前认为的最优解是把项目中的每个文件都touch一遍即可: ```bash find . -type f -exec touch {} \; ` ......
智能佳—LoCoBot WX250 6自由度 (用于科研与教学的ROS智能车)
LoCoBot是用于映射、导航和操纵(可选)等ROS研究的智能车,研究人员、教育工作者和学生都可以使用LoCoBot专注于高级代码的开发,而不是专注硬件和构建低级代码。通过开放的源代码软件、完整的ROS映射和导航包以及模块化的开放源代码Python API,LoCoBot上的开发得以简化,用户仅需1 ......
ros melodic安装,rosdep init失败解决方法
1. 背景: 前段时间手贱把之前安装好的ros环境给删了,这两天刚好需要用,遇到了点之前踩过的坑,主要是众所周知的rosdep init失败,这里记录一下。 2. 系统:Ubuntu 18.04 3. 网络环境:有魔法 3. 需求:安装ros melodic版本 4. 安装步骤: a. 基本流程都可 ......
ros2安装经验总结
按照官网来安装的, ubuntu20上面安装galactic系列。参考 ubuntu install ros2 碰到问题,无法apt update, 提示“NO_PUBKEY F42ED6FBAB17C654”,参考https://answers.ros.org/question/398460/ho ......
ROS发布订阅消息接口中queue_size和buff_size的理解
转载:https://blog.csdn.net/qq_37082966/article/details/97172729 机器人应用中难免会遇到运算起来很费时间的操作,比如图像的特征提取、点云的匹配等等。有时候,不可避免地,我们需要在ROS的Subscriber的Callback回调函数中进行这些 ......
ros系统 修改工作空间的名字
一、打开终端 (1)输入 mv 旧的工作空间名字 新的工作空间名字 (2)gedit ~/.bashrc (3)把原先旧的名字换成新的名字 (4)source ~/.bashrc (5)把工作空间中的devel和build文件和src中CMakeLists.txt给删掉 (6)进入src目录,输入c ......
esp8266无线小车
## 项目简介 本项目是基于`esp8266`实现的无线小车控制,核心的原理是通过`js`与`esp8266`进行`websocket`通信,前端页面模拟操作摇杆,生成操作数据,然后通过`websocket`通信将控制数据发送至`esp8266`,实现小车的无线控制 ### 准备工作 #### 硬件 ......
小车PID巡线调节
# PID巡线调节 ## 1、双巡线P控制 #### KP可以先从0.2值调起,P比例主要控制小车能够在线上正常巡线, **P比例说明:KP值越小,转弯幅度越大,会直接越过黑线。KP值越大,转弯幅度越小,能正常巡线,但是摆动很平凡。** 误差=右巡线-左巡线 两个模拟巡线之间的误差值 p修正值=误差 ......
ubuntu20.4安装配置ros系统(noetic)
不同ubuntu版本对应的ros版本名称 ubuntu版本 ros1版本 ros2版本 16.04 kinetic ardent 18.04 melodic dashing 20.04 noetic foxy 1、打开软件与更新,切换ubuntu软件源(国内阿里云) 2、打开终端,添加ros软件源( ......
【实验】树莓派小车
 # 树莓派小车实验报告 # 1 小车构造及环境配置 ## 1.1 ......
【ROS学习】初学ROS的小项目
# ROS学习:turtle控制  ## turtle旋转 首先查看turtlesim里面的节点,使用rqt ......
【ROS学习】配置rotors-simulator
本文按照https://github.com/ethz-asl/rotors_simulator一步一步搭建并且踩坑记录。 ## 雷 * 第一个坑:尽量不要在虚拟机上跑,因为你在catkin make的时候就会卡住。 * 在原文中也提到了,第一次加载gazebo的时候会出现超时error,不要慌,关 ......
ROS业务,IP业务完全终止
今天,混播ROS业务完全终止,也代表着过去十三年的网络业务的完全终止。 从2010年至今,这个业务给我的生活提供了物质保障,今天完全落下帷幕了。新转型的项目也有了起色。感谢ROS,感谢MIKROTIK公司的技术,给了我十几年稳定的生活。让我在逆境中度过难关。感谢拉脱维亚这个伟大的国家。 接下来,将完 ......
小车
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universedeb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ ......
Beginner:Client libraries-9 使用ros2doctor识别问题
目标:在ros2系统中通过ros2doctor工具来识别问题。 背景 当ros2系统没有按预期运行,可以通过ros2doctor来检查设置。 ros2doctor检查ros2的所有方面,包括平台,版本,网络,环境,运行系统等等,警告你可能的错误和问题的原因。 ros2doctor是ros2cli的一 ......
ROS2-Beginner:10-记录和播放数据
目标:记录发布到话题上的数据,可以任何时候回放和检查。 背景 ros2-bag是一个命令行工具,用于记录系统中主题发布的数据。它累积在任意数量的主题上传递的数据,并将其保存在数据库中。然后,您可以回放数据以重现测试和实验的结果。录制主题也是分享你的作品并允许他人重新创作的好方法。 任务 1、运行如下 ......
ROS2-Beginner:9-启动节点
目标:使用命令行工具来启动多个节点 背景 在大多数入门教程中,您一直在为运行的每个新节点打开新的终端。当您创建越来越多节点同时运行的更复杂的系统时,打开终端和重新输入配置细节会变得乏味。 launch文件允许您同时启动和配置包含ROS 2节点的许多可执行文件。 使用ros2-launch命令运行一个 ......
ROS2-Beginner:8-使用rqt_console来浏览日志
目标:了解rqt_console,用于查看日志消息的工具。 背景 rqt_console是一个图形化工具用于查看ROS2中的日志消息。通常,日志消息在你个终端显示。用rqt_console,可以统一浏览这些日志,过滤、保存以及从文件中加载。 任务 1、启动rqt_console ros2 run r ......
ROS2-Beginner:7-理解行为
背景 行为ROS2中的一种通信类型,用于长时间的运行任务。由三个部分组成:目标,反馈以及结果。 行为建立在话题和服务之上的。他们的功能类似于服务,但可以取消操作。他们还提供了稳定的反馈,而不是返回单一的响应的服务。 行为使用了一个客户端-服务器模型,类似于发布者和订阅者。一个行为客户端节点发送一个目 ......
ROS2-Beginner:6-理解参数
目标:学习怎样获得,设置,保存以及加载参数。 背景 参数是节点的配置值。可以将参数视为节点设置。节点可以将参数存储为整数、浮点值、布尔值、字符串和列表。在ROS 2中,每个节点都维护自己的参数。对于更多的背景参数,please see the concept document。 任务 1、运行tur ......
ROS2-Beginner:5-理解服务
背景 服务是ros graph中另一种通信方法。服务是基于调用和响应相比话题是发布者和订阅者模式。话题允许节点来订阅数据流并获得连续的更新。服务只当被具体客户端调用时才提供数据。 任务 1、打开turtlesim仿真器 ros2 run turtlesim turtlesim_node ros2 r ......
ROS2-Beginner:3-理解话题
目标:使用rqt_graph以及命令行工具来查看ros2 topic。 背景 ROS2将复杂的系统分解为许多模块化节点。话题是ROS图的一个重要元素,它充当节点交换消息的总线。 一个节点可以发布数据到任意数量的话题,同时可以订阅任意数量的话题。 话题是在节点之间以及系统的不同部分之间移动数据的主要方 ......
ROS2-Beginner:3-理解节点
目标:学习ROS2中节点的功能,以及与他们交互的工具 背景 1、ROS2graph ROS图是ROS2元素同时一起处理数据的网络。它包含了所有可执行文件以及它们之间的连接,如果您要将它们全部映射出来并可视化的话。 2、在ROS2中的节点 在ROS中的每一个节点都应该负责单一的模块化目的,例如控制车轮 ......
ROS2-Beginner:2-turtlesim ros2 ,rqt
目标:安装和使用turtlesim包以及rqt工具用于后续的教程; 背景:Turtlesim是一个轻量级的用于学习ROS2的仿真器。其说明了ROS2在最基本的层面上所做的事情,让你知道以后你将如何处理真实的机器人或机器人模拟。 ROS2工具是用户如何管理、调试以及与ROS系统交互的。它支持针对系统及 ......
ROS2-Beginner:CLI tools-1、环境配置
1、环境配置 目标:本教程告诉读者怎样准备ROS2环境 背景:ROS2依赖于使用shell环境组合工作空间的概念,“工作区”是一个ROS术语,表示您使用ROS 2进行开发的系统上的位置。ROS 2的核心工作空间称为底层(underlay)。后续的局部工作空间称为覆盖(overlays)。当使用ROS ......
平衡小车
#电源电路设计 1.https://blog.csdn.net/zhuoqingjoking97298/article/details/120050517?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidu ......
darknet_ros安装
1.下载darknet_ros # 创建文件夹mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src# 下载源文件git clone --recursive git@github.com:leggedrobotics/darknet_ros.git # 初始化文件 c ......
STM32平衡小车学习笔记
# PID算法 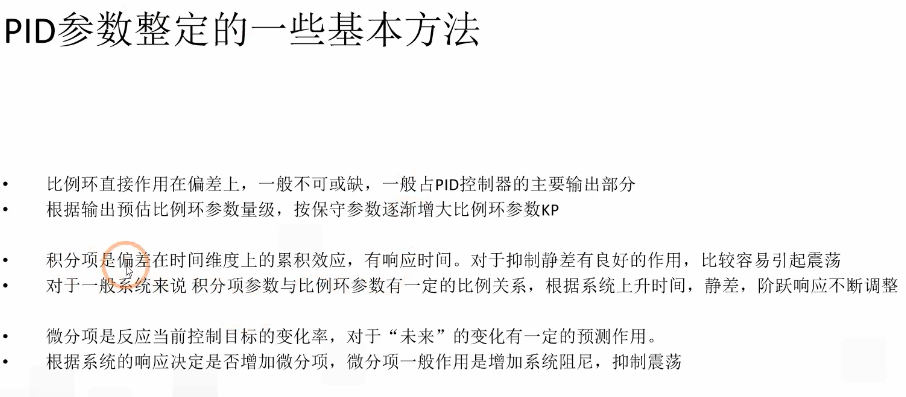 **速度与位置串级PID** ![image](https://img2023.cnblo ......
麦轮小车项目总结
麦轮小车项目概括 项目简介:使用遥控器控制麦轮小车,通讯方式为2.4G无线信号,控制方式为通过遥控器上的摇杆或者陀螺仪,控制小车的方向和速度。 项目难点: 用NRF24L01实现无线通讯,编码解码的实现。 DRV8833的驱动实现。 摇杆控制、重力模式控制小车的算法的实现。 项目时间历程: 第一阶段 ......