因子vins imu
重磅!2023年影响因子正式发布,附Excel下载
大家好,这里是专注表观组学十余年,领跑多组学科研服务的易基因。 2023年最新影响因子正式揭晓! 刚刚,2023年6月28日,Clarivate Analytics(科睿唯安)发布了各大SCI期刊的2022年影响因子。 肿瘤神刊+四大医学 老牌CNS 部分国产期刊如下: Cell Research ......
R语言广义加性混合模型(GAMM)分析长沙气象因子、空气污染、PM2.5浓度、显著性检验、逐日变化可视化
全文链接:https://tecdat.cn/?p=32981 原文出处:拓端数据部落公众号 气候变化和空气污染对现代社会产生了越来越大的影响。在这种背景下,研究气象和空气污染之间的关系以及其对PM2.5浓度的影响变得非常重要。为了更好地理解和解释这些关系,广义加性混合模型(GAMM)成为一种强大的 ......
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator-翻译
摘要:本文介绍了一种单目视觉惯性系统(VINS),用于在各种环境中进行状态估计。单目相机和低成本惯性测量单元(IMU)构成了六自由度状态估计的最小传感器套件。我们的算法通过有界滑动窗口迭代地优化视觉和惯性测量,以实现精确的状态估计。视觉结构是通过滑动窗口中的关键帧来维护的,而惯性度量则是通过关键帧之 ......
【算法】根据整数数组,生成正的素因子二位数组,并排序
给定一个正整数或负整数的数组,I=[i1,..,in] 生成一个形式为的排序数组P [[p,I数组的所有ij的和,其中p是ij的素因子(p为正)]…] P将按素数的递增顺序进行排序。 示例: I={12,15};//结果=“(2 12)(3 27)(5 15)” [2,3,5]是I的元素的所有素因子 ......
Java-HashMap中的扰动函数、负载因子与扩容链表拆分
## 1.扰动函数 在hashmap中,put操作是这样进行的: ```java public V put(K key, V value) { return putVal(hash(key), key, value, false, true); } ``` 其中会涉及到`hash(key)`的运算, ......
VINS-Fusion学习笔记(一)
# **1. operator的用法** c++工程文件结构:  **test.h具体:** ``` # ......
R语言上市公司经营绩效实证研究 ——因子分析、聚类分析、正态性检验、信度检验
全文链接:http://tecdat.cn/?p=32747 原文出处:拓端数据部落公众号 随着我国经济的快速发展,上市公司的经营绩效成为了一个备受关注的话题。本文旨在探讨上市公司经营绩效的相关因素,并运用数据处理、图示、检验和分析等方法进行深入研究,帮助客户对我国45家上市公司的16项财务指标进行 ......
VINS论文阅读
相关工作 一种流行的基于EKF的VIO方法是MSCKF[13][14]。MSCKF在状态向量中维护以前的几个摄像机位姿,并使用多个摄像机视图中相同特征的视觉测量来形成多约束更新。SR-ISWF[18][19]是MSCKF的扩展。它采用squareroot形式[20]实现单精度表示,避免了较差的数值性 ......
猕猴桃 bHLH 转录因子家族的鉴定及生物信息学分析
猕猴桃 bHLH 转录因子家族的鉴定及生物信息学分析 参与人员:毛甲绪22020080029;陶蓉22020080040;郑慧敏22020080071;沈智峰22020080032 背景 在植物中,第一个被发现的 bHLH 超基因家族成员是玉米 R 基因,实验证明其在花青素合成中起到关键作用(Lud ......
[汽车]车架号(VIN)的设计与规范
# 1 车架号概述 + `VIN`是英文`Vehicle Identification Number`(`车辆识别代码`)的缩写,也就是我们平时所说的**车架号**、**大架号**。 + 总共由17位字符组成,是**汽车唯一的身份识别信息**,好比于汽车的“`身份证号码`”。 + VIN码的历史沿革 ......
蛋白质的结构的预测与 TCP 转录因子家族功能冗余分析
蛋白质的结构的预测与 TCP 转录因子家族功能冗余分析 生物信息学伴随着人类基因组计划的发展而产生,生物信息学是一门交叉学科,它包含了生物信息的获取、加工、储存、分配、分析、解释等在内的所有方面,它运用数学、计算机科学和生物学的各种工具来阐明和理解大量的数据所包含的生物学意义。生物信息学是生命科学领 ......
图像和IMU数据与rosbag互转
1. 图像和IMU数据-->rosbag kalibr_bagcreater --folder /home/xue/桌面/cali/storage06011455/. --output-bag camimu.bag 2. rosbag-->图像和IMU数据 kalibr_bagextractor - ......
易基因:全基因组ChIP-seq分析揭示细菌转录因子PhoB的基因内结合位点|mBio
大家好,这里是专注表观组学十余年,领跑多组学科研服务的易基因。 细菌编码许多转录因子(transcription factor,TF),这些转录因子通过与启动子周围的DNA结合并调控RNA聚合酶(RNAP)全酶以结合启动子DNA或异构化为主动转录构象的能力来调节转录起始。目前对TF功能的研究几乎集中 ......
realsense d435i获取 imu数据
import pyrealsense2.pyrealsense2 as rs import configparser import numpy as np import time import csv import cv2 config_pro = configparser.ConfigParser ......
求一个数所有因子的集合的子集中满足所有数均互质的最大子集
题意: 很明显了,就是把数 n 的所有因子求出来,在里面挑选一些数,使这些数之间均互质,求这些的最大个数。 结论: 先讲结论:最大个数为数 n 的质因数个数加1 思路: 我们已知一个数的质因数,就可以把这个数表示成若干质因数的乘积,例如: 12 = 2 * 2 * 3;其中2,3是12的质因数,表达 ......
被问懵了:什么是负载因子?为什么是0.75?
前几天面试被问懵了,还是关于 HashMap 的面试题,什么是负载因子?为什么是0.75?第一个问题还好回答,然而第二个问题就有点含糊其辞说不清楚了,所以今天就来好好复盘一下这道题。 HashMap 负载因子 load factor,也叫做扩容因子和装载因子,它是 HashMap 在进行扩容时的一个 ......
IMU 积分进行航迹推算
# IMU 积分进行航迹推算 > **Reference** [https://github.com/gaoxiang12/slam_in_autonomous_driving](https://github.com/gaoxiang12/slam_in_autonomous_driving) ## ......
基于扩张状态观测器eso扰动补偿和权重因子调节的电流预测控制,相比传统方法,增加了参数鲁棒性。
基于扩张状态观测器eso扰动补偿和权重因子调节的电流预测控制,相比传统方法,增加了参数鲁棒性。降低电流脉动,和误差。基于扩张状态观测器eso补偿的三矢量模型预测控制。ID:41123672941746934 ......
imu 话题数据,欧拉角
header: 消息头,包含序列号、时间戳和坐标系等信息。 orientation: IMU 的当前朝向,用四元数表示,包括 $x, y, z$ 和 $w$ 四个值。 orientation_covariance: 朝向协方差矩阵,包含 $9$ 个元素,描述 IMU 测量的朝向误差。 angular ......
realsense d435i获取imu数据
#!/usr/bin/python from __future__ import print_function import numpy as np import sys import json import ctypes import os import binascii import struc ......
python 串口读取IMU
# coding:UTF-8 # Version: V1.0.1 import serial ACCData = [0.0]*8 GYROData = [0.0]*8 AngleData = [0.0]*8 FrameState = 0 # What is the state of the judg ......
【论文】Range-Focused Fusion of Camera-IMU-UWB for Accurate and Drift-Reduced Localization
## Abstract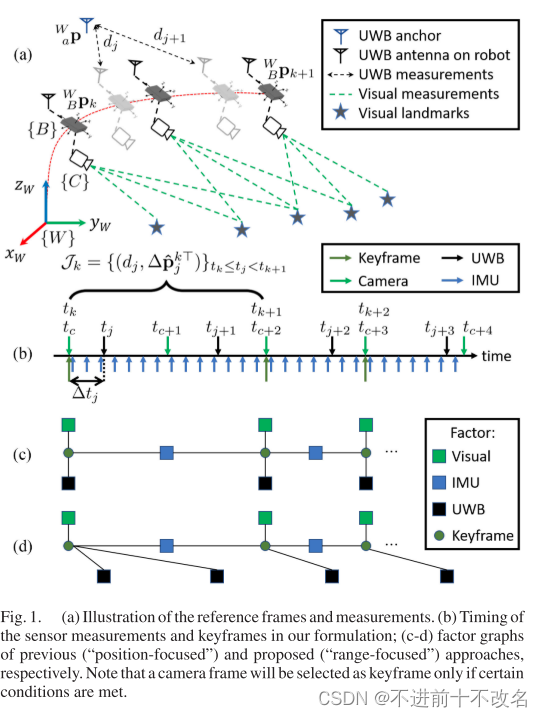## I. INTRODUCTION为什么需要添加UWB?因为传统的VIO会由于传感器的噪声和计算误差产生累计偏移。所以需要G ......
IMU和GPS ekf融合定位 从matlab到c++代码实现
IMU和GPS ekf融合定位 从matlab到c++代码实现基于位姿状态方程,松耦合文档原创且详细 YID:6745659043907933 ......
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前?
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前提下,根据GNSS/GPS的定位信息与IMU信息完成IMU到GNSS/GPS 的外参标定,并进一步获得IMU到车体坐标系的外参标定。本商品提供两种标定模式:车辆直线运动及自由运动,这两种模 ......
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代?
激光SLAM之激光雷达+IMU建图 , 工程化落地项目,涉及激光雷达+imu 多传感器融合建图,加工程应用角度的代码优化,从数据接收到闭环检测到图优化,非常完整。 该商品与本人发布的“激光SLAM之多传感器融合定位”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地项目,里面 ......
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,里面还增加了工程应用角度的代码优化,配置解析文档也非常完整。该商品与本人发布的“激光SLAM之激光雷达+IMU建图”是可以组合使用的。 该项目价格会比其他项目高的原因主要是在于这是真正的落地 ......
带遗忘因子的递推最小二乘法推导
摘要:最小二乘法的递推形式、直流信号的遗忘递推形式、遗忘递推最小二乘。 递推最小二乘法 对多组数据 $\vec{x}i$ 和 $y_i$,满足 $$y_i = \vec{x}^\mathrm{T}i\vec{\theta}$$ 其中 $\vec{x}i$ 是输入数据向量,$y_i$ 是输出数据标量。 ......
IMU and GPS Fusion for Inertial Navigation Label: Research
转载自IMU and GPS Fusion for Inertial Navigation This example shows how you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicl ......
什么是imu
IMU是惯性测量单元(Inertial Measurement Unit)的缩写 是测量物体三轴姿态角(或角速率)及加速度的装置 陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。 ......